什么是毫米波雷达
毫米波是指波长介于1-10mm的电磁波,波长短、频段宽,比较容易实现窄波束,雷达分辨率高,不易受干扰。毫米波雷达是测量被测物体相对距离、现对速度、方位的高精度传感器,早期被应用于军事领域,随着雷达技术的发展与进步,毫米波雷达传感器开始应用于汽车电子、无人机、智能交通等多个领域。
目前各个国家对车载毫米波雷达分配的频段各有不同,但主要集中在24GHz和77GHz,少数国家(如日本)采用60GHz频段。由于77G相对于24G的诸多优势,未来全球车载毫米波雷达的频段会趋同于77GHz频段(76-81GHz)。
车载毫米波雷达的原理
车载毫米波雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过中央处理单元(ECU)进行智能处理。经合理决策后,以声、光及触觉等多种方式告知或警告驾驶员,或及时对汽车做出主动干预,从而保证驾驶过程的安全性和舒适性,减少事故发生几率。
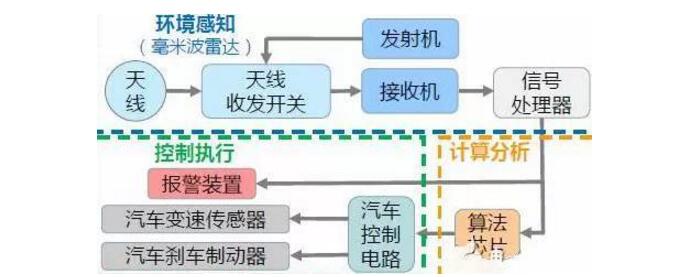
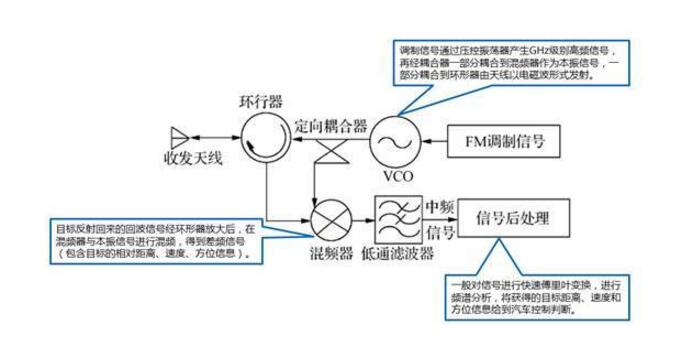
毫米波雷达工作路径简图
根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。其中连续波又可以分为FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。
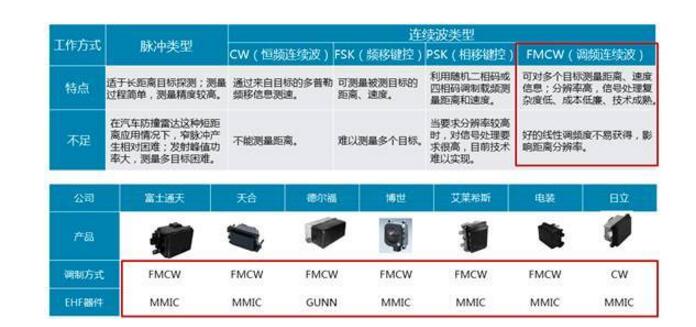
由于可测量多个目标、分辨率较高、信号处理复杂度低、成本低廉、技术成熟,FWCW雷达成为最常用的车载毫米波雷达,德尔福、电装、博世等Tier1供应商均采用FMCW调制方式。
FMCW雷达系统主要包括收发天线、射频前端、调制信号、信号处理模块等。毫米波雷达通过接收信号和发射信号的相关处理实现对目标的探测距离、方位、相对速度。
毫米波雷达发展现状
目前,毫米波雷达主要为24GHz和77GHz。
24GHz的雷达测量距离较短(5~30m),主要应用于汽车后方;77GHz的雷达测量距离较长(30~70m),主要应用于汽车前方和两侧。毫米波雷达主要包括雷达射频前端、信号处理系统、后端算法三部分。在现有的产品中,雷达后端算法的专利授权费用约占成本的50%,射频前端约占成本的40%,信号处理系统约占成本的10%。
1、射频前端
射频前端通过发射和接收毫米波,得到中频信号,从中提取距离、速度等信息。因此,射频前端直接决定了雷达系统的性能。当前毫米波雷达射频前端主要为平面集成电路,有混合微波集成电路(HMIC)和单片微波集成电路(MMIC)两种形式。其中,MMIC形式的射频前端成本低,成品率高,适合于大规模生产。在生产工艺上,一般采用的是外延MESFET、HEMT和HBT等器件工艺。其中,GaAs基的HEMT工艺最为成熟,具有优秀的噪声性能。
2、信号处理系统
信号处理系统也是雷达重要的组成部分,通过嵌入不同的信号处理算法,提取从射频前端采集得到的中频信号,获得特定类型的目标信息。信号处理系统一般以DSP为核心,实现复杂的数字信号处理算法,满足雷达的实时性需求。
3、后端算法
后端算法占整个毫米波雷达成本的比例最高。针对毫米波雷达,国内研究人员从频域、时域、时频分析多个角度提出了大量的算法,离线实验的精度也较高。但是,国内的雷达产品主要采用基于频域的快速傅里叶变换及其改进算法进行分析,测量精度和适用范围有一定局限性而国外算法受专利严格保护,价格非常昂贵。

毫米波雷达市场概况及未来发展前景
1、毫米波雷达可以实现自动驾驶多种功能
ADAS采用的传感器主要有摄像头、毫米波雷达、激光、超声波、红外等。毫米波雷达传输距离远,在传输窗口内大气衰减和损耗低,穿透性强,可以满足车辆对全天气候的适应性的要求,并且毫米波本身的特性,决定了毫米波雷达传感器器件尺寸小、重量轻等特性。很好的弥补了摄像头、激光、超声波、红外等其他传感器,在车载应用中所不具备的使用场景。
把毫米波雷达安装在汽车上,可以测量从雷达到被测物体之间的距离、角度和相对速度等。利用毫米波雷达可以实现自适应巡航控制(AdaptiveCruiseControl),前向防撞报警(ForwardCollisionWarning),盲点检测(BlindSpotDetection),辅助停车(Parkingaid),辅助变道(Lanechangeassistant),自主巡航控制(ACC)等高级驾驶辅助系统(ADAS)功能。比较常见的汽车毫米波雷达工作频率在24GHz和77GH附近。24GHz雷达系统主要实现近距离探测(SRR),而77GHz系统主要实现远距离的探测(LRR)。
2、毫米波雷达市场空间广阔
由于各国汽车安全标准的不断提高,导致主动安全技术高级驾驶辅助系统(ADAS)近年来呈快速发展趋势。汽车毫米波雷达因为能够全天候工作,已成为汽车电子厂商公认的主流选择,拥有巨大的市场需求。2014年全球汽车毫米波雷达市场出货量在1900万个,据市场研究机构PlunkeetResearch预测,预计到2020年全球汽车毫米波雷达将近7000万个,2015-2020年的年均复合增速约为24%。目前汽车毫米波雷达市场主要被大陆、博世、天合、海拉等欧美厂商占据。
目前汽车毫米波雷达处于高速发展中,一般支持ADAS功能的汽车会使用2或3个毫米波雷达,全新奥迪A4使用5个毫米波雷达,奔驰的S级汽车采用7个毫米波雷达,预计未来单车采用毫米波雷达的平均数量将继续增长,对于汽车雷达PCB的需求也将快速增长。
由于毫米波发送和接收信号的频率为24GHz和77GHz,并且雷达PCB高频电路包括时钟、信号调制、功放、滤波器、天线等部分,对PCB板材和制造工艺都有较高的要求。因此,汽车雷达PCB会带来更高的价值量。以占全球高频PCB市场30%的Schweizer为例,ElectronicAG的高频PCB通常需要PTFE填充陶瓷和玻璃材料才可以满足高于77GHz的设计需求。