指南针
关于指南针的实现,网上已经有很多的文章了,简单搜一下都能看懂,原理都一样,要使用Android系统的传感器实现,我们先简单看一下指南针的实现过程。
指南针的实现
1.传感器
实现指南针需要的传感器可以分为两种,一种是屏幕方向传感器,但是已经被Google 标记为了 @Deprecated。
@Deprecated
public static final int TYPE_ORIENTATION = 3;`
另一种比较新的方式,需要两个传感器配合,分别为加速度传感器和磁场传感器,我们主要说一下这种方式的实现。
public static final int TYPE_ACCELEROMETER = 1;
public static final int TYPE_MAGNETIC_FIELD = 2;
2.获取传感器
首先我们需要获取到这两个传感器,记得做判空操作。
sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
sensorManager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD);
3.订阅监听
接下来订阅对这两个传感器的监听:
sensorManager.registerListener(this, accelerometer, SensorManager.SENSOR_DELAY_NORMAL);
sensorManager.registerListener(this, magneticField, SensorManager.SENSOR_DELAY_NORMAL);
自定义监听实现接口:SensorEventListener ,这个接口有两个方法,分别是:
public void onSensorChanged(SensorEvent event);
public void onAccuracyChanged(Sensor sensor, int accuracy);
关于他们的作用,看一下接口里的注释,写的非常详细,顺便提一嘴,他们写的注释真是长,但是这真的是一个好习惯,对自己也是一个很好的提升的过程。
4.数据处理
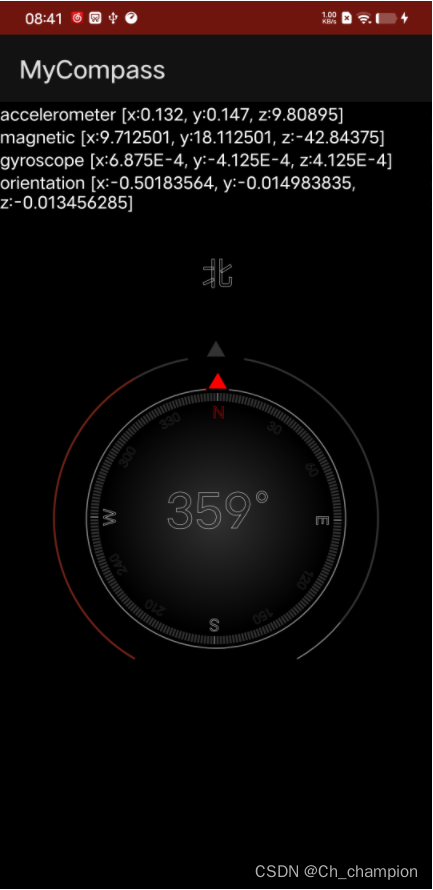
最后就是对数据的处理了,通过用SDK中给出API对传感器返回数据的处理,就能获得当前的方向,这段代码我就直接贴出来吧,
float[] R = new float[9];if (SensorManager.getRotationMatrix(R, null, accelerValues, magneticFieldValues)) {float[] orientation = new float[3];SensorManager.getOrientation(R, orientation);float direction = (float) Math.toDegrees(orientation[0]) * -1.0f;} else {Log.d("Compass", "Error: SensorManager.getRotationMatrix");}
到此为止,你就得到了指南针所需要的全部数据了,然后用这个数据去驱动一个Imageview + 动画,指南针就实现了。
指南针的校准
初步实现完了指南针,但是,转着转着,发现不准了角度,一看监听返回的数据也不准了,这时就需要来校准指南针了,具体的做法是什么呢,那就是拿手机画8,

那什么时候需要校准呢,怎么判断呢?这就用到上面监听返回的参数了accuracy:
@Overridepublic void onAccuracyChanged(Sensor sensor, int accuracy) {Log.d("TAG", "onAccuracyChanged: :" +accuracy);}
那么什么时候校验呢,看一下注释,分了5个级别,分别是:
public static final int SENSOR_STATUS_NO_CONTACT = -1;
public static final int SENSOR_STATUS_UNRELIABLE = 0;
public static final int SENSOR_STATUS_ACCURACY_LOW = 1;
/*** This sensor is reporting data with an average level of accuracy,* calibration with the environment may improve the readings*/
public static final int SENSOR_STATUS_ACCURACY_MEDIUM = 2;
/** This sensor is reporting data with maximum accuracy */
public static final int SENSOR_STATUS_ACCURACY_HIGH = 3;
那么我们就可以知道,精度小于3个都不可信
if (accuracy >= SensorManager.SENSOR_STATUS_ACCURACY_HIGH ) {Log.e("Compass", " 不需要校验");} else {Log.e("Compass", " 需要校准 "); }
至此,指南针的基本实现,校准的标准判断,就都有了,赶紧实现以下吧。