案例背景(共13页精讲):该篇博客将告诉您:
- Vector VN1630A,VN1640A,VH6501 I/O的使用;
- 将Vector VN1630A/VN1640A CAN/LIN Interface的I/O接口充当一个简易的“示波器”使用;
- 观察“CAN唤醒”工作的ECU控制器的“启动时间”;
- 观察“IG唤醒”工作的ECU控制器的“启动时间”;
- 观察“非常电”工作的ECU控制器的“启动时间”;
- 观察MCU/外设芯片TTL电平的输出;
- 观察MCU/外设芯片的pin脚的“反应/响应时间”。
目录
1 Vector VN1630A/VN1640A的硬件介绍
1.1 D-SUB9 (CH5 - IO)接口定义
1.1.1 D-SUB9 (CH5 - IO)内部“硬件电路”和“技术参数”介绍
2 项目应用:Vector VN1630A/VN1640A I/O
2.1 场景1:充当一个简易的“示波器”使用
2.1.1 接线图介绍
2.1.2 CANoe/CANalyzer工具的配置
2.1.3 观察Vector VN1630A/VN1640A简易“示波器”
2.2 场景2:观察MCU/外设芯片TTL电平的输出
2.2.1 接线图介绍
2.2.2 观察Digital input 0和Digital input 1的输入
2.3 场景3:观察“CAN唤醒”工作的ECU控制器的“启动时间”
2.3.1 接线图介绍
2.3.2 观察“CAN唤醒”过程中其它Pin脚的变化
2.4 场景4:观察“IG唤醒”工作的ECU控制器的“启动时间”
2.4.1 接线图介绍
2.4.2 观察IG信号到ECU发出第一帧信号的时间
2.5 场景5:观察“非常电”工作的ECU控制器的“启动时间”
2.5.1 接线图介绍
2.5.2 观察ECU供上电,到其发出第一帧信号的时间
2.6 场景6:观察MCU和外设芯片的pin脚的“反应/响应时间”
2.6.1 接线图介绍
2.5.2 观察ECU供上电,到其发出第一帧信号的时间
3 在CANoe/CANalyzer工具的Trace窗口观察Analog input和Digital input
结尾
优质博文推荐阅读(单击下方链接,即可跳转):
Vector工具链
CAN Matrix DBC
CAN Matrix Arxml
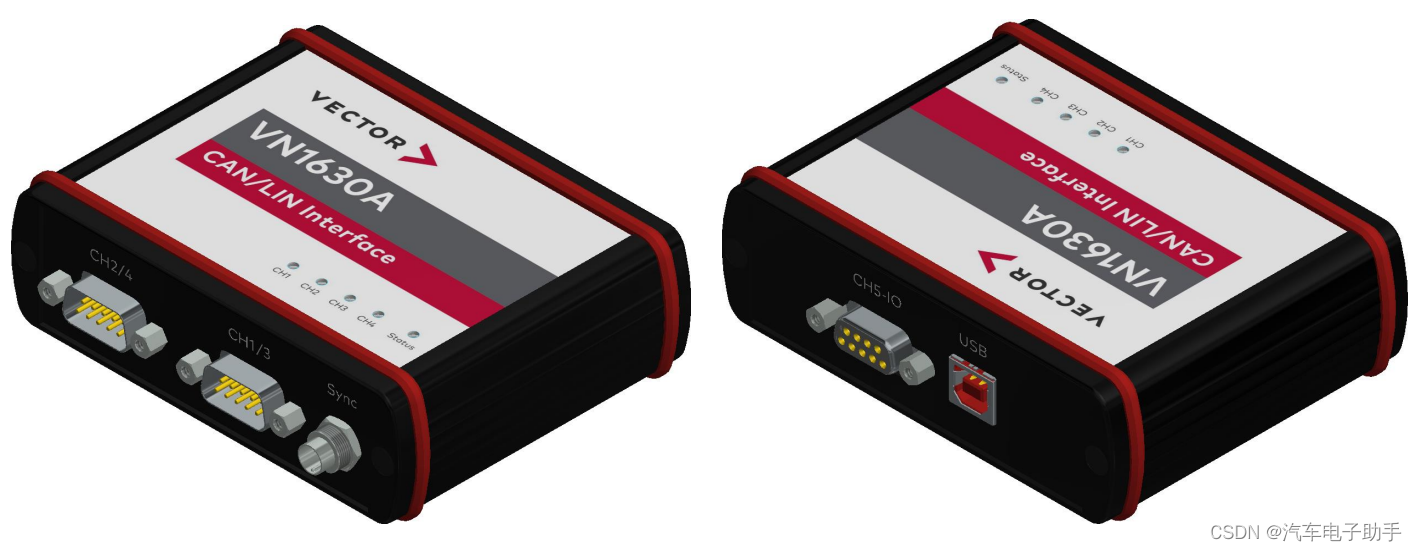
1 Vector VN1630A/VN1640A的硬件介绍
VN1630A接口的主要特点是:
- 2个CAN高速1051cap收发器(电容去耦),2个用于CAN-/LINpiggies的额外插件位置
- 第5通道用于专用的digital-analog数字-模拟输入/输出任务
- 3个D-SUB9连接器
- 5个LED灯显示总线活动和状态
- Software sync软件同步
- Hardware sync硬件同步(通过SYNCcableXL)。
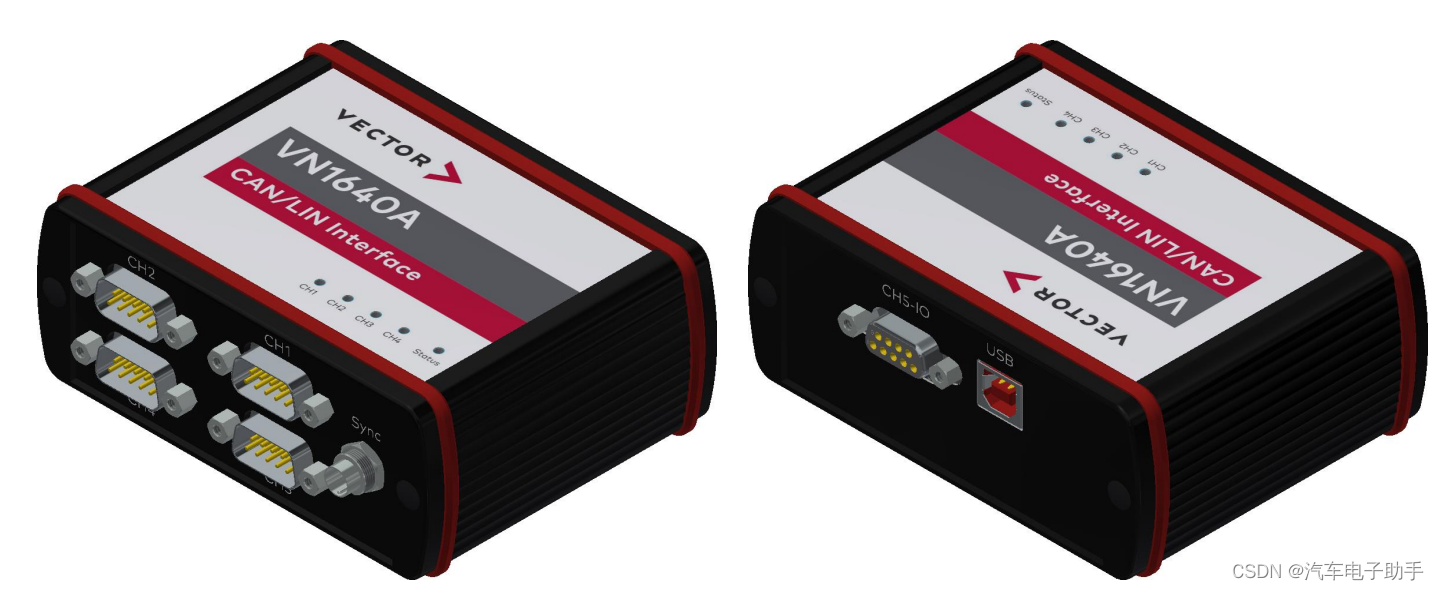
VN1640A接口的主要特点是:
- 4个用于CAN-、LIN-、K-Line、J1708-和SENTpiggybacks的插件位置
- 第5通道用于专用的digital-analog数字-模拟输入/输出任务
- 5个D-SUB9连接器
- 5个LED灯显示总线活动和状态
- Software sync软件同步
- Hardware sync硬件同步(通过SYNCcableXL)。
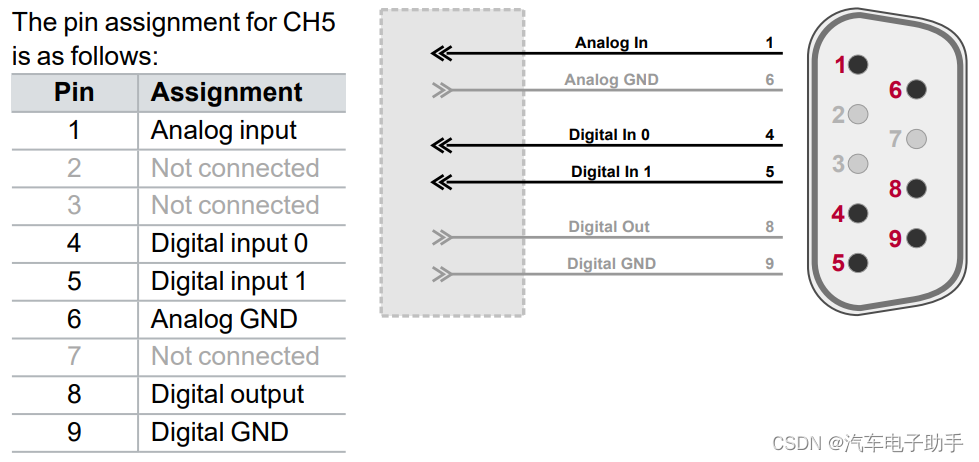
1.1 D-SUB9 (CH5 - IO)接口定义
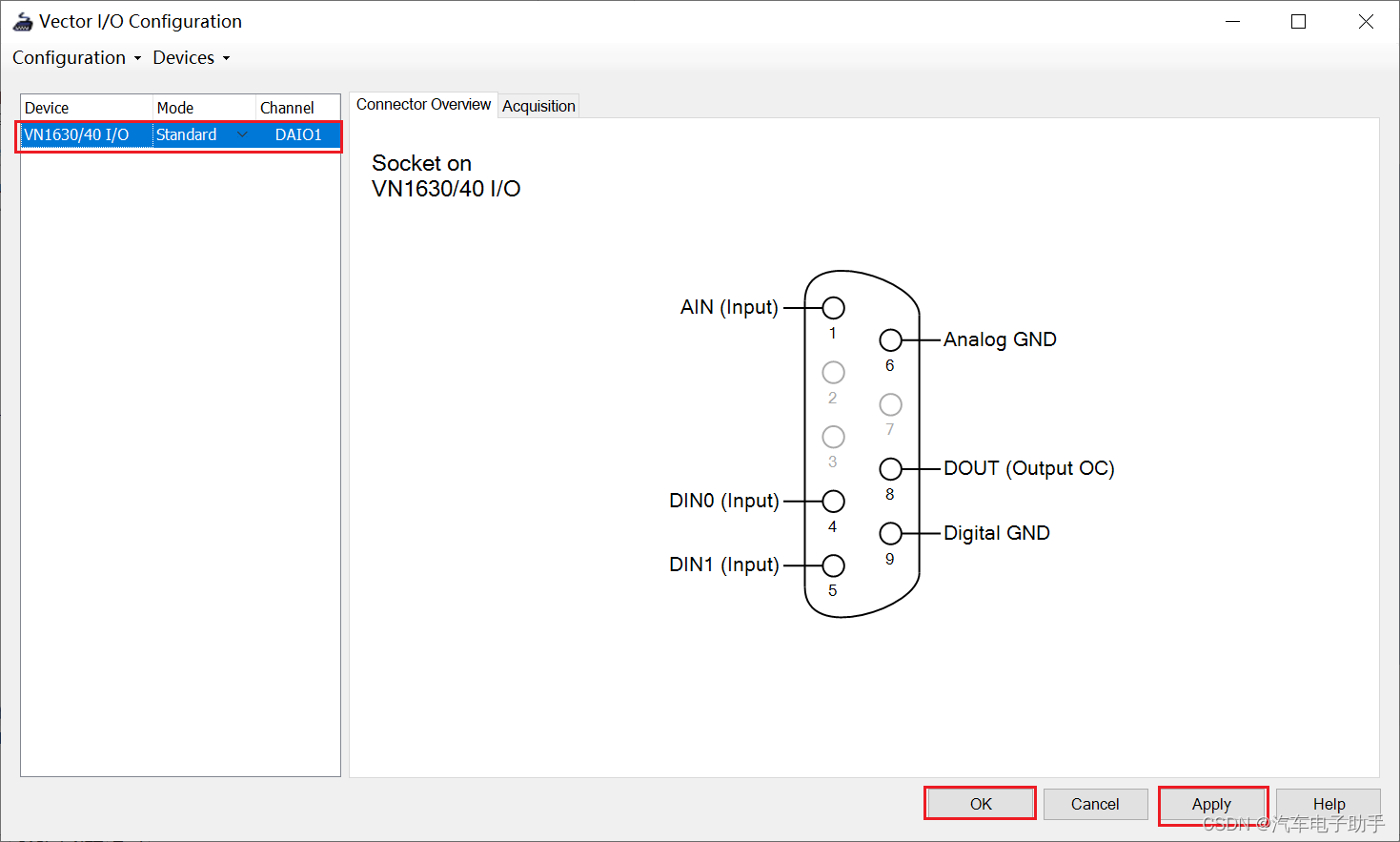
VN1630A/VN1640A有一个D-SUB9连接器(CH5),用于专门的digital-analog输入/输出任务。引脚(Analog input,Analog GND,Digital input 0,Digital input 1,Digital output,Digital GND)分配见图。
1.1.1 D-SUB9 (CH5 - IO)内部“硬件电路”和“技术参数”介绍
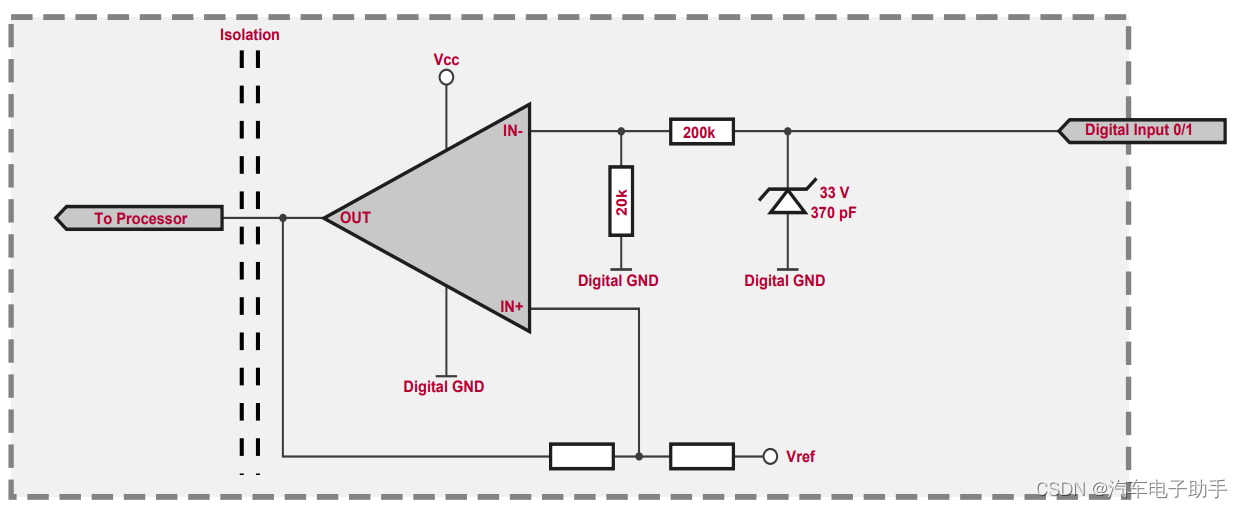
数字输入0/1:
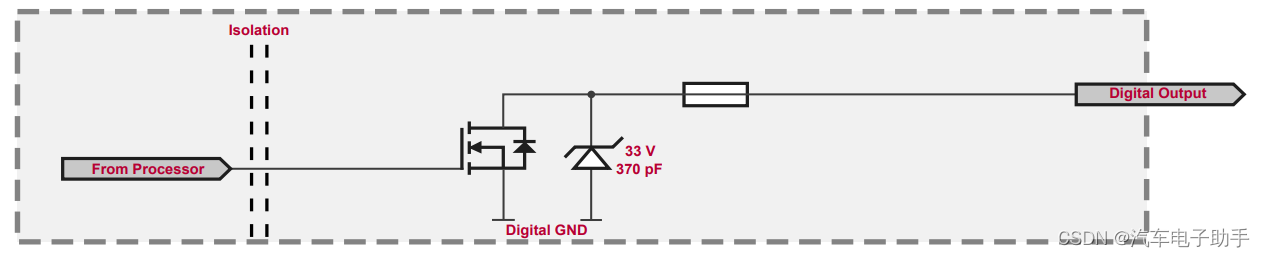
数字输出:
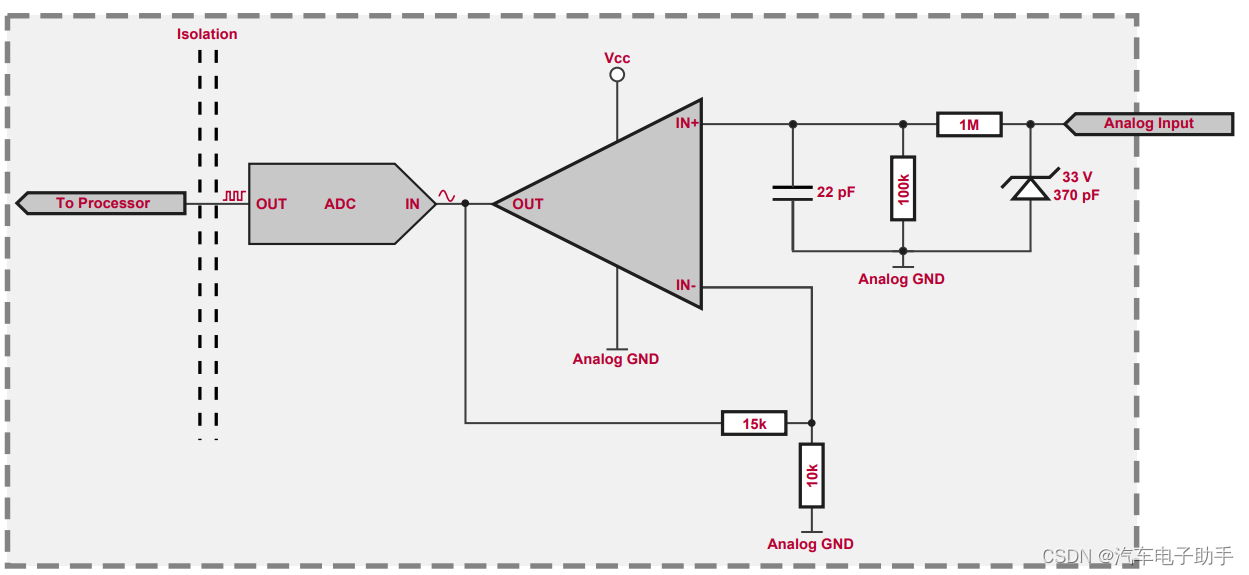
模拟输入:
D-SUB9 (CH5 - IO)硬件技术参数:
| Analog input | 10位 输入0 V...18 V 电压容差高达50 V (使用串联电阻) 采样率最高为1 kHz(1ms) |
| Digital input | 范围0 V...32 V Schmitt trigger高电平2.7 V,低电平2.2 V 滞后0.5 V 输入频率高达1 kHz(1ms) |
| Digital output | 开漏Open Drain 外部电源高达32 V 电流最大500 mA 短路/过压保护 |
2 项目应用:Vector VN1630A/VN1640A I/O
当你身边没有示波器时,可考虑以下CASE。
注意:Analog input,Digital input只能做到最低1ms的采样。
2.1 场景1:充当一个简易的“示波器”使用
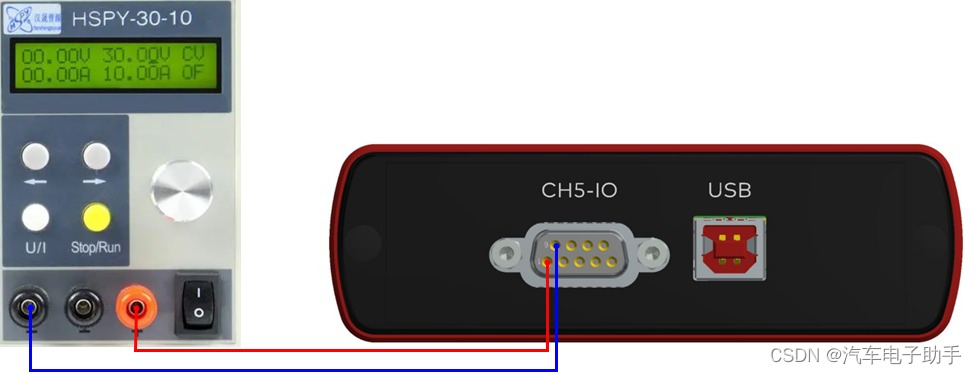
2.1.1 接线图介绍
12V直流可调电源的正极,与D-SUB9 (CH5 - IO)的Pin1: Analog input连接;
12V直流可调电源的负极,与D-SUB9 (CH5 - IO)的Pin6: Analog GND连接。
2.1.2 CANoe/CANalyzer工具的配置
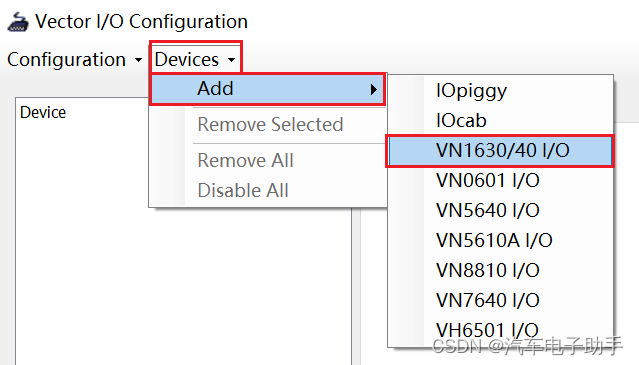
打开CANoe/CANalyzer,在菜单栏中,依次打开Hardware -- > Vector I/O;

弹出Vector I/O Configuration对话框,依次选择Devices -- > Add -- > VN1630/40 I/O;
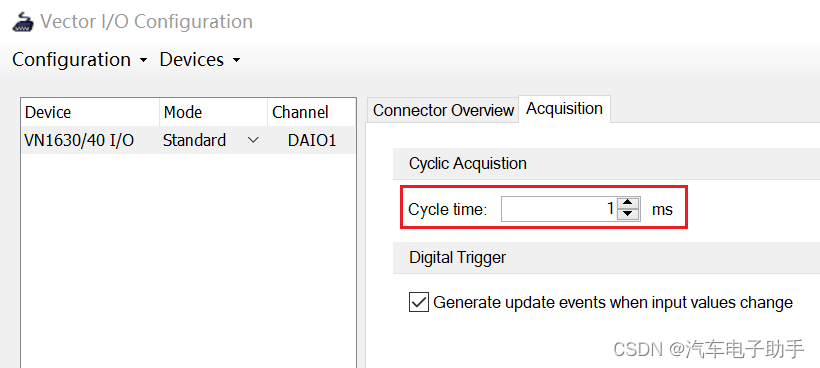
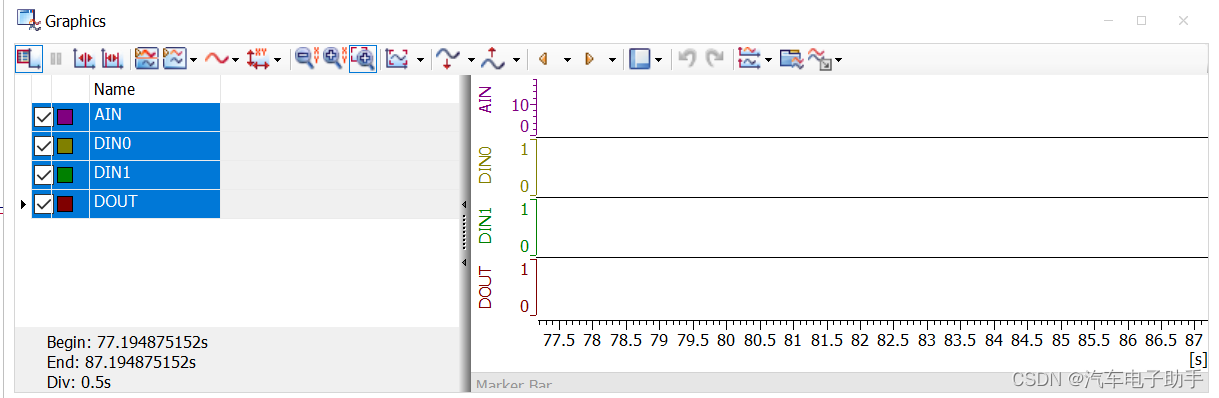
在Acquisition子页中,设置Analog input,Digital input 0/1,Digital output的采样时间(该时间,也是对应System Variables系统变量在Trace和Graphics窗口中的刷新时间),最小1ms。完成Vector I/O Configuration的配置,单击Apply和OK;
在Graphics窗口的空白处,鼠标右键,在其上下文中,选择Add Variables,
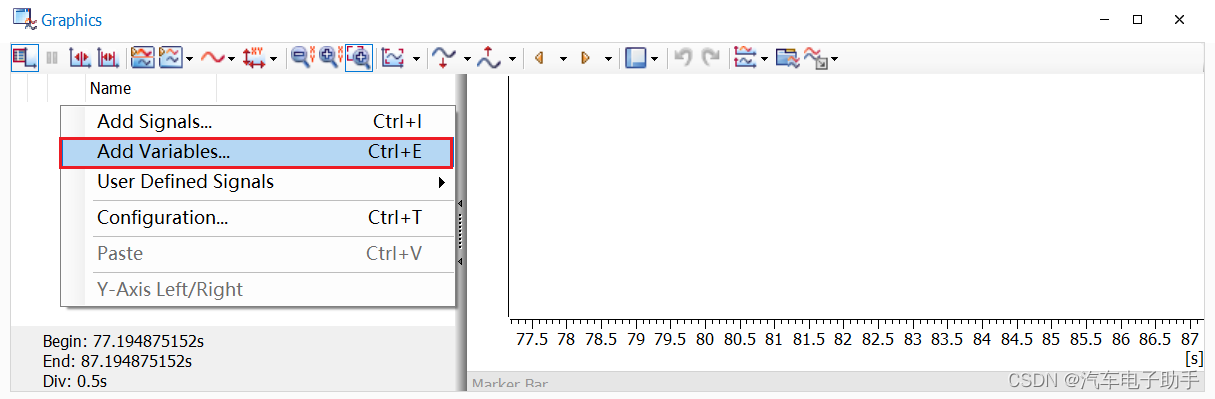
在弹出的Symbol Selection对话框中,选中Vector I/O提供的系统变量:AIN,DIN 0,DIN 1,DOUT;

单击CANoe/CANalyzer左上角的闪电按钮,进行启动。
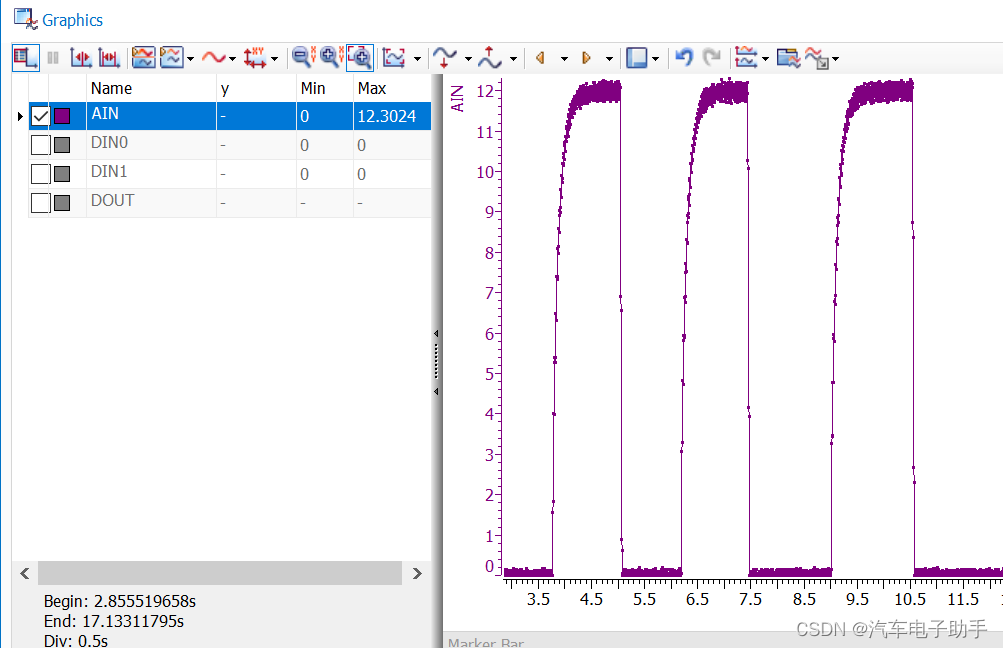
2.1.3 观察Vector VN1630A/VN1640A简易“示波器”
启动/关闭12V直流稳压电源,你可以通过Graphics窗口中的AIN信号,看到12V电压的变化。
2.2 场景2:观察MCU/外设芯片TTL电平的输出
由于VN1630A/VN1640A的D-SUB9连接器(CH5),只有一路Analog input模拟输入,在某些场景下,需要观察多路的情况下,可考虑使用另外两路Digital input 0和Digital input 1数字输入。
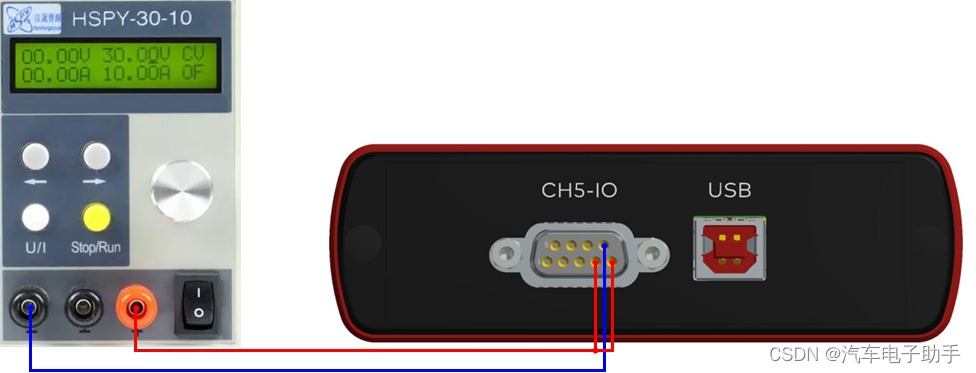
2.2.1 接线图介绍
12V直流可调电源的正极,与D-SUB9 (CH5 - IO)的Pin4: Digital input 0和Pin5: Digital input 1连接;
12V直流可调电源的负极,与D-SUB9 (CH5 - IO)的Pin9: Digital GND连接。
注意:为了方便观察Digital input 0和Digital input 1的使用,我们将Pin4: Digital input 0,Pin5: Digital input 1和Pin1: Analog input并接在一起;将Pin9: Digital GND和Pin6: Analog GND并接在一起
2.2.2 观察Digital input 0和Digital input 1的输入
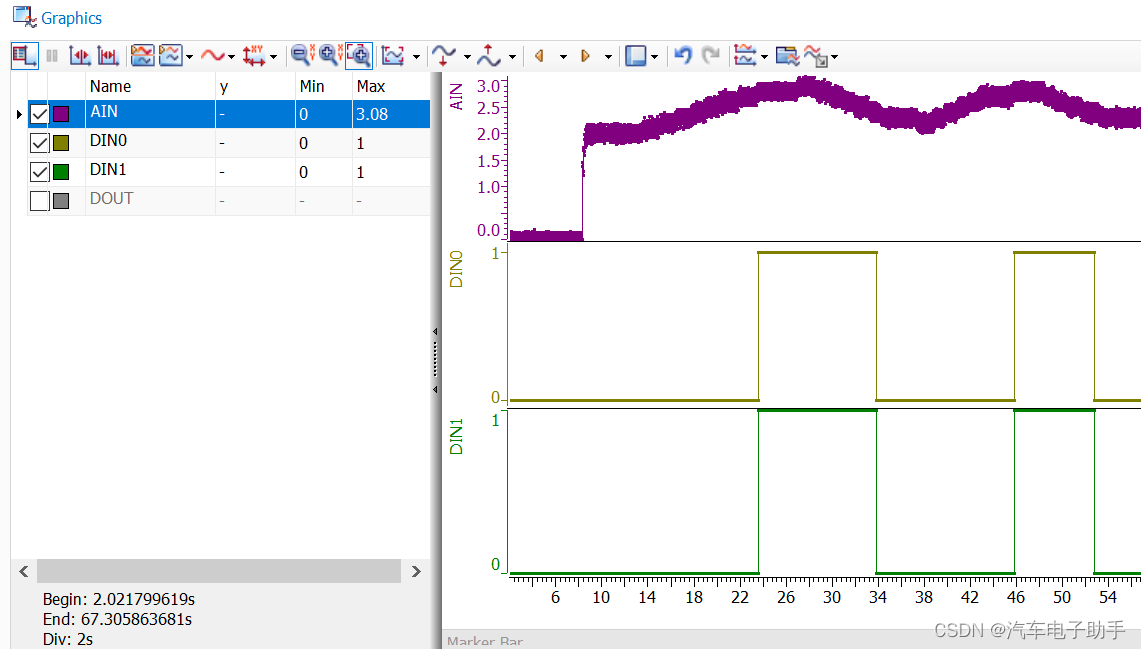
根据“2.1.2 CANoe/CANalyzer工具的配置”章节的配置,你可以通过Graphics窗口中的DIN0和DIN1信号:
- 当输入电压,高于2.7 V时,DIN0/1输出1;
- 当输入电压,低于2.2 V时,DIN0/1输出0;
应用:对于一些使用TTL电平输出的Pin脚,可考虑使用Digital input 0和Digital input 1观察。
2.3 场景3:观察“CAN唤醒”工作的ECU控制器的“启动时间”
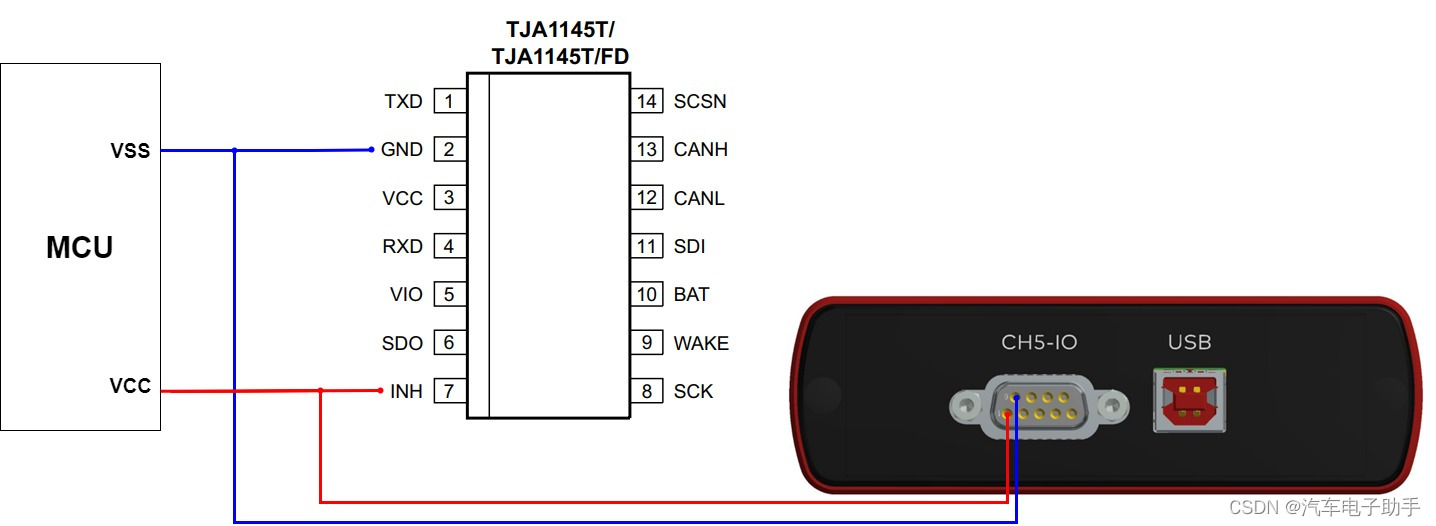
通常在CANoe/CANalyzer的Graphics窗口中,分别添加一个ECU控制器接收的信号和发送的信号,皆可观察“CAN唤醒”工作的ECU控制器的“启动时间”,在这过程中,如果你想观察其它PIN的输出,如CAN收发器INH,可按照图2.3.1 接线图进行连接。
2.3.1 接线图介绍
在MCU的VCC和CAN收发器的INH连接位置,并接D-SUB9 (CH5 - IO)的Pin1: Analog input连接;
在MCU的VSS和CAN收发器的GND连接位置,并接D-SUB9 (CH5 - IO)的Pin6: Analog GND连接。
2.3.2 观察“CAN唤醒”过程中其它Pin脚的变化
根据“2.1.2 CANoe/CANalyzer工具的配置”章节的配置,在Graphics窗口,除了分别添加一个ECU控制器接收的信号和发送的信号,还要添加AIN信号,皆可观察此过程其它PIN的输出。
2.4 场景4:观察“IG唤醒”工作的ECU控制器的“启动时间”
IG唤醒既是硬线唤醒,使用Vector VN1630A/VN1640A观察硬线输入。
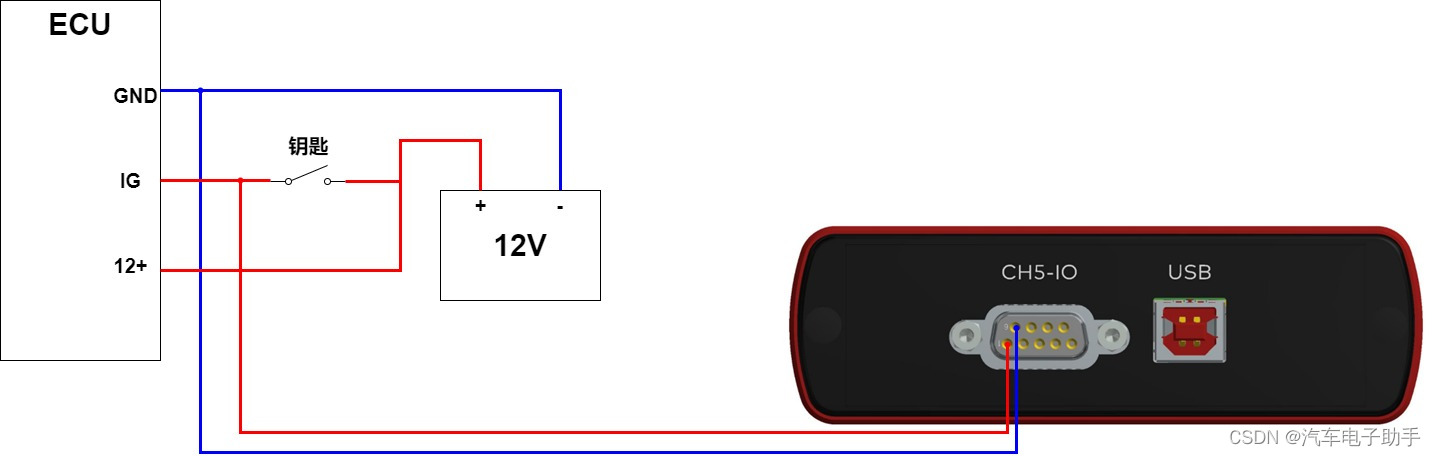
2.4.1 接线图介绍
在ECU的IG和钥匙连接位置,并接D-SUB9 (CH5 - IO)的Pin1: Analog input连接;
在ECU的GND和低压12V负极连接位置,并接D-SUB9 (CH5 - IO)的Pin6: Analog GND连接。
2.4.2 观察IG信号到ECU发出第一帧信号的时间
根据“2.1.2 CANoe/CANalyzer工具的配置”章节的配置,在Graphics窗口,除了添加一个ECU控制器发送的信号,还要添加AIN信号,即可观察“IG唤醒”工作的ECU控制器的“启动时间”。
2.5 场景5:观察“非常电”工作的ECU控制器的“启动时间”
车辆中,某些ECU控制器是非常电工作(没有CAN唤醒,也没有硬线唤醒),可按照图2.5.1 接线图进行连接,观察该ECU控制器的“启动时间”。
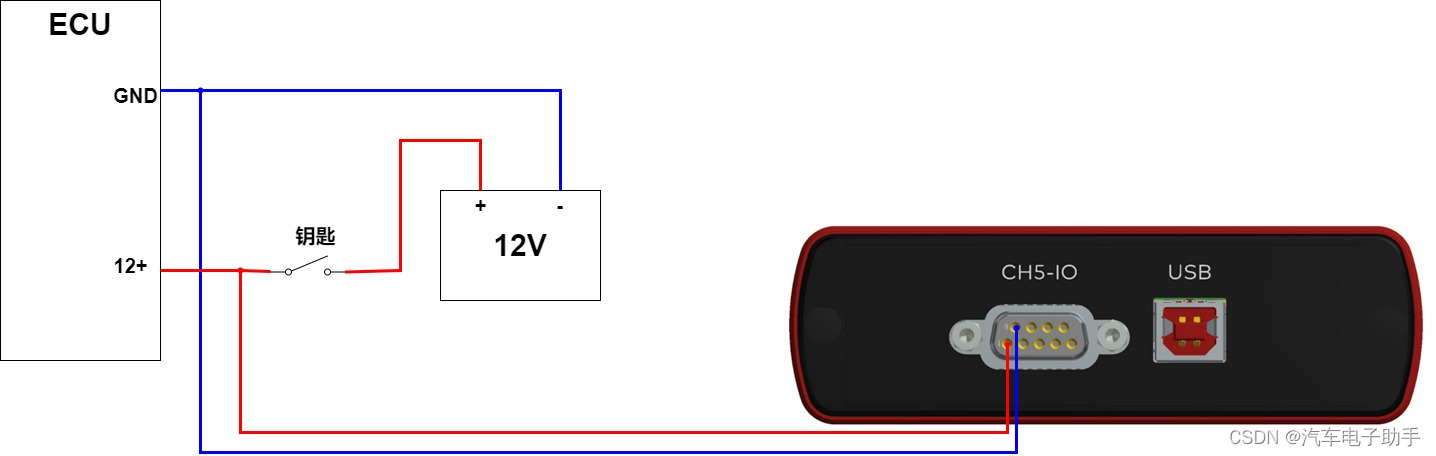
2.5.1 接线图介绍
在ECU的12+和钥匙连接位置,并接D-SUB9 (CH5 - IO)的Pin1: Analog input连接;
在ECU的GND和低压12V负极连接位置,并接D-SUB9 (CH5 - IO)的Pin6: Analog GND连接。
2.5.2 观察ECU供上电,到其发出第一帧信号的时间
根据“2.1.2 CANoe/CANalyzer工具的配置”章节的配置,在Graphics窗口,除了添加一个ECU控制器发送的信号,还要添加AIN信号,即可观察“非常电”工作的ECU控制器的“启动时间”。
2.6 场景6:观察MCU和外设芯片的pin脚的“反应/响应时间”
ECU控制器在收到某些CAN信号时,需要驱动其外部设备,可按照图2.6.1 接线图进行连接,观察该ECU控制器的“反应/响应时间”。
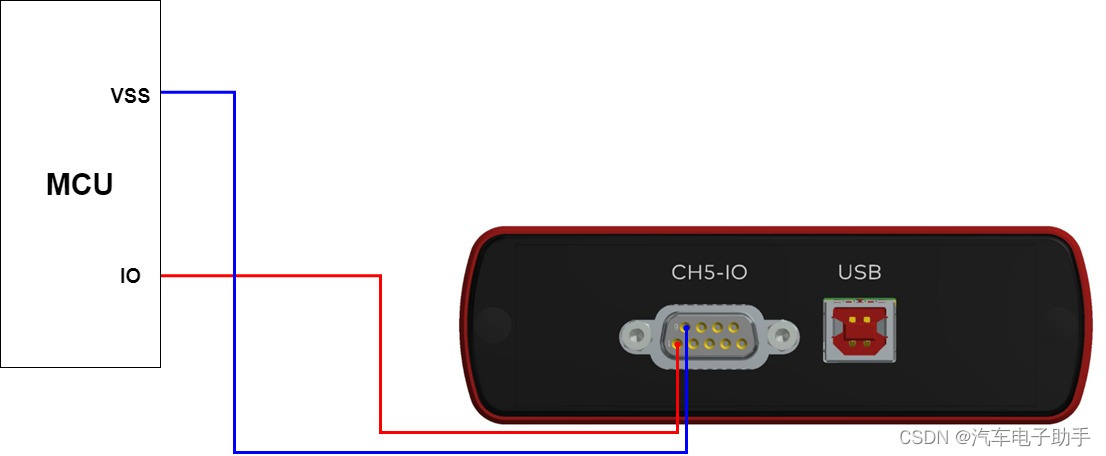
2.6.1 接线图介绍
ECU的IO口,与D-SUB9 (CH5 - IO)的Pin1: Analog input连接;
ECU的VSU,与D-SUB9 (CH5 - IO)的Pin6: Analog GND连接。
注意:也可以使用Digital input 0和Digital input 1
2.5.2 观察ECU供上电,到其发出第一帧信号的时间
根据“2.1.2 CANoe/CANalyzer工具的配置”章节的配置,在Graphics窗口,除了添加ECU控制器接收的控制信号,还要添加AIN信号,即可观察ECU控制器pin脚的“反应/响应时间”。
3 在CANoe/CANalyzer工具的Trace窗口观察Analog input和Digital input
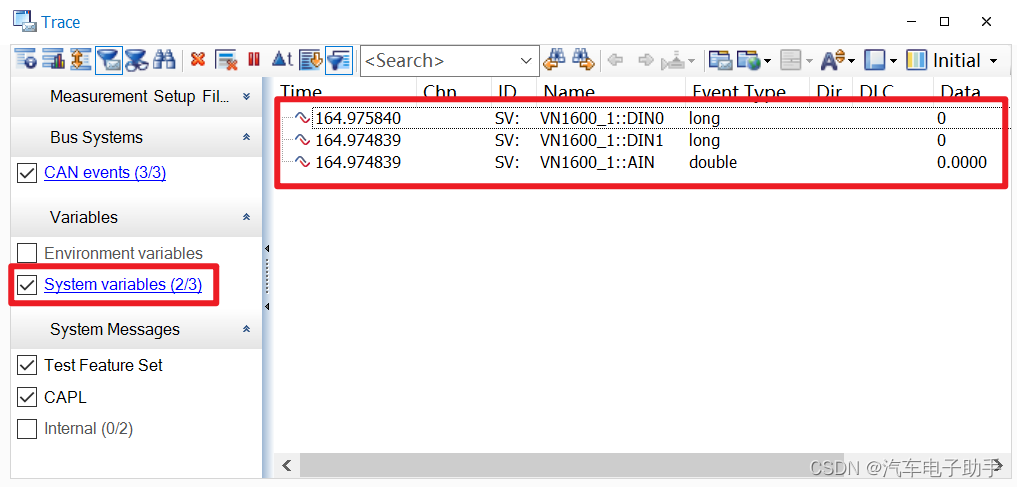
完成“2.1.2 CANoe/CANalyzer工具的配置”章节的配置,在Trace窗口中,选择“Predefined filter”;
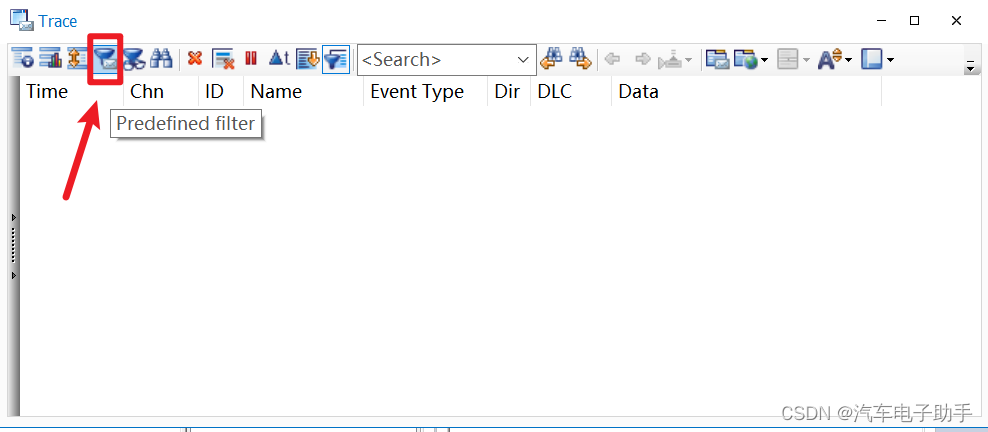
在弹出的右侧页面中,选择System Variables,即可显示DIN0,DIN1,AIN的采样。

结尾
获取更多“汽车电子资讯”和“工具链使用”,
请关注CSDN博客“汽车电子助手”,做您的好助手。

![[风格迁移系列五: WaveCT-AIN] 医学图像的风格迁移和跨域自适应(泛化性)](https://img-blog.csdnimg.cn/d5f927e7f352412799eac9767462d8e7.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAa2V2aW5vb3A=,size_20,color_FFFFFF,t_70,g_se,x_16)
