提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、像空间重构是什么?
- 二、相空间重构的方法
- 1.观测非线性系统,得到测量值:
- 2.相空间重构——参数的确定——介绍
- 3.延迟时间间隔 τ \tau τ的确定
- 4.嵌入维 d d d的确定(有的文章中记作m)
- 总结
前言
对于混沌时间序列,无论是:
1.混沌不变量的计算,
2.混沌模型的建立
还是:
3.预测,
都在相空间中进行。
因此:相空间重构是混沌时间序列处理中的重要步骤。
注意:
- 这里的时间序列由一个确定的非线性动力系统产生
一、像空间重构是什么?
相空间重构是一种:由已知的时间序列,来恢复并刻画原动力系统的方法。
简而言之:由时间序列恢复原系统的方法
二、相空间重构的方法
最常用的方法是利用takens的延迟嵌入定理:
对于无限长,无噪声的 d ′ d^{'} d′维混沌吸引子的一维标量时间序列 { x ( i ) , i = 1 , ⋯ , n } \left\{ \text{x}\left( \text{i} \right) ,\text{i}=1,\cdots ,\text{n} \right\} {x(i),i=1,⋯,n},都可以在拓扑不变的意义下找到一个 d d d维的嵌入相空间,如果维数 d ⩾ 2 d ′ + 1 d\geqslant 2d^{'}+1 d⩾2d′+1。
1.观测非线性系统,得到测量值:
{ x ( i ) , i = 1 , ⋯ , n } \left\{ \text{x}\left( \text{i} \right) ,\text{i}=1,\cdots ,\text{n} \right\} {x(i),i=1,⋯,n}
这称做混沌序列。
- 非线性系统不一定是混沌系统,混沌系统一定是非线性系统
2.相空间重构——参数的确定——介绍
相空间重构技术有两个关键的参数:
- 嵌入的维数 d d d
- 延迟时间 τ \tau τ(时滞)
由于:
- Takens 嵌入定理只在理论上证明了嵌入维数和延迟时间的存在性,并没有给出具体的表达式;
- 实际应用中时间序列都是有噪声的有限序列。
因此:
嵌入维数和时间延迟必须要根据实际的情况来选取合适的值。
代码如下(示例):
3.延迟时间间隔 τ \tau τ的确定
有两种方法:
- 线性自相关函数法(自相关系数法)
- 平均互信息法(交互信息法)
1.自相关系数法:


虽然:自相关函数法简便有效,但是:
它仅仅能提取时间序列的线性相关性。

2. 互信息法

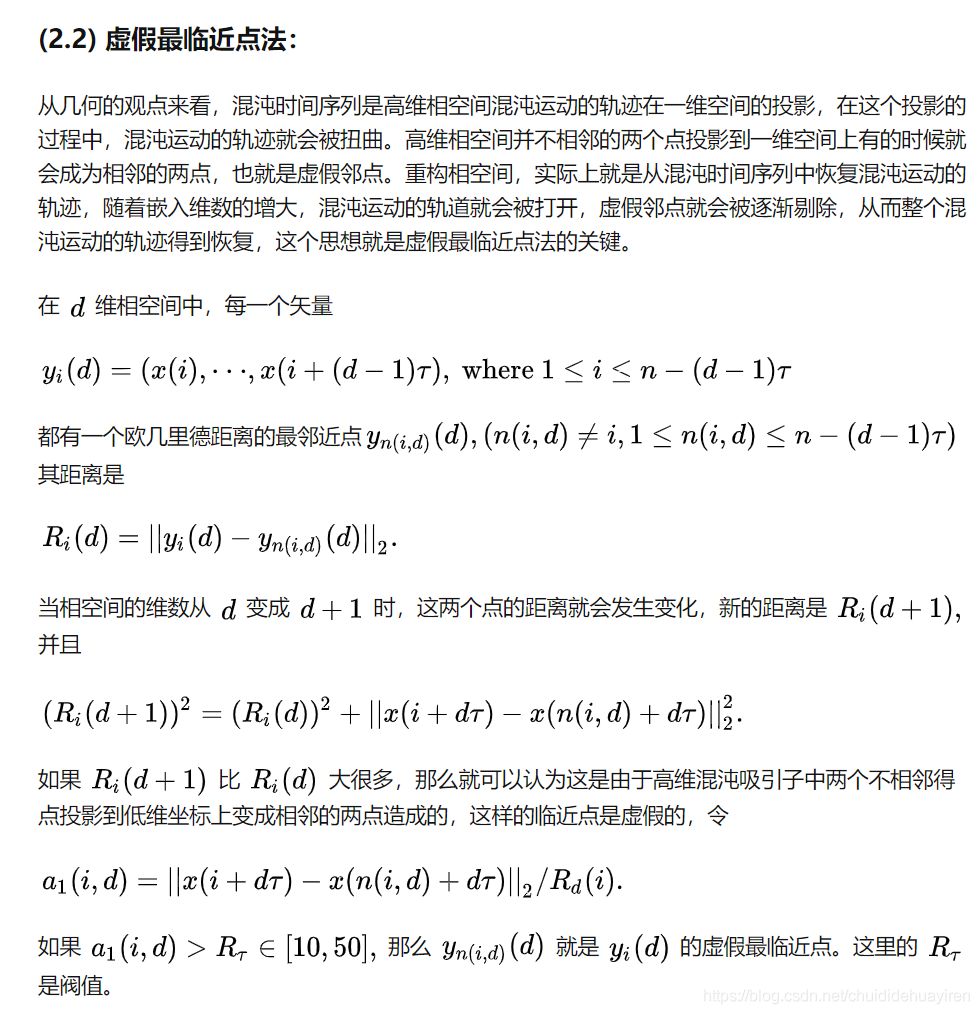
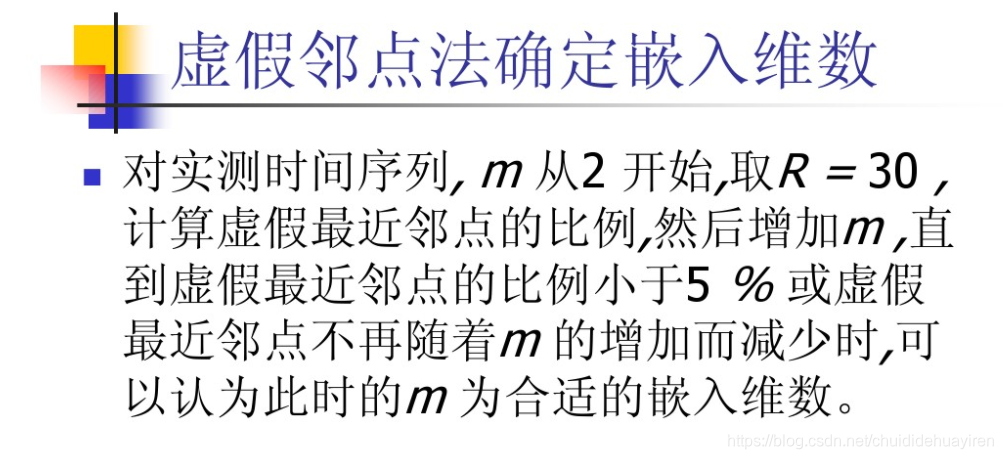
4.嵌入维 d d d的确定(有的文章中记作m)
1.虚假最邻近点法
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。