【强化学习原理+项目专栏】必看系列:单智能体、多智能体算法原理+项目实战、相关技巧(调参、画图等、趣味项目实现、学术应用项目实现
专栏详细介绍:【强化学习原理+项目专栏】必看系列:单智能体、多智能体算法原理+项目实战、相关技巧(调参、画图等、趣味项目实现、学术应用项目实现
对于深度强化学习这块规划为:
- 基础单智能算法教学(gym环境为主)
- 主流多智能算法教学(gym环境为主)
- 主流算法:DDPG、DQN、TD3、SAC、PPO、RainbowDQN、QLearning、A2C等算法项目实战
- 一些趣味项目(超级玛丽、下五子棋、斗地主、各种游戏上应用)
- 单智能多智能题实战(论文复现偏业务如:无人机优化调度、电力资源调度等项目应用)
本专栏主要方便入门同学快速掌握强化学习单智能体|多智能体算法原理+项目实战。后续会持续把深度学习涉及知识原理分析给大家,让大家在项目实操的同时也能知识储备,知其然、知其所以然、知何由以知其所以然。
声明:部分项目为网络经典项目方便大家快速学习,后续会不断增添实战环节(比赛、论文、现实应用等)
-
专栏订阅(个性化选择):
-
强化学习原理+项目专栏大合集-《推荐订阅☆☆☆☆☆》
-
强化学习单智能体算法原理+项目实战《推荐订阅☆☆☆☆》
-
强化学习多智能体原理+项目实战《推荐订阅☆☆☆☆☆》
-
强化学习相关技巧(调参、画图等《推荐订阅☆☆☆》)
-
tensorflow_gym-强化学习:免费《推荐订阅☆☆☆☆》
-
强化学习从基础到进阶-案例与实践:免费《推荐订阅☆☆☆☆☆》
-
强化学习从基础到进阶-案例与实践[4]:深度Q网络-DQN、double DQN、经验回放、rainbow、分布式DQN
传统的强化学习算法会使用表格的形式存储状态价值函数 V ( s ) V(s) V(s) 或动作价值函数 Q ( s , a ) Q(s,a) Q(s,a),但是这样的方法存在很大的局限性。例如,现实中的强化学习任务所面临的状态空间往往是连续的,存在无穷多个状态,在这种情况下,就不能再使用表格对价值函数进行存储。价值函数近似利用函数直接拟合状态价值函数或动作价值函数,降低了对存储空间的要求,有效地解决了这个问题。
为了在连续的状态和动作空间中计算值函数 Q π ( s , a ) Q_{\pi}(s,a) Qπ(s,a),我们可以用一个函数 Q ϕ ( s , a ) Q_{\phi}(\boldsymbol{s},\boldsymbol{a}) Qϕ(s,a) 来表示近似计算,称为价值函数近似(value function approximation)。
Q ϕ ( s , a ) ≈ Q π ( s , a ) Q_{\phi}(\boldsymbol{s}, \boldsymbol{a}) \approx Q_{\pi}(\boldsymbol{s}, \boldsymbol{a}) Qϕ(s,a)≈Qπ(s,a)
其中, s \boldsymbol{s} s、 a \boldsymbol{a} a 分别是状态 s s s 和动作 a a a 的向量表示,函数 Q ϕ ( s , a ) Q_{\phi}(\boldsymbol{s}, \boldsymbol{a}) Qϕ(s,a) 通常是一个参数为 ϕ \phi ϕ 的函数,比如神经网络,其输出为一个实数,称为 Q 网络(Q-network)。
深度Q网络(deep Q-network,DQN)是指基于深度学习的Q学习算法,主要结合了价值函数近似与神经网络技术,并采用目标网络和经历回放的方法进行网络的训练。在 Q学习 中,我们使用表格来存储每个状态 s s s 下采取动作 a a a 获得的奖励,即状态-动作值函数 Q ( s , a ) Q(s,a) Q(s,a)。然而,这种方法在状态量巨大甚至是连续的任务中,会遇到维度灾难问题,往往是不可行的。因此,深度Q网络 采用了价值函数近似的表示方法。
1 状态价值函数
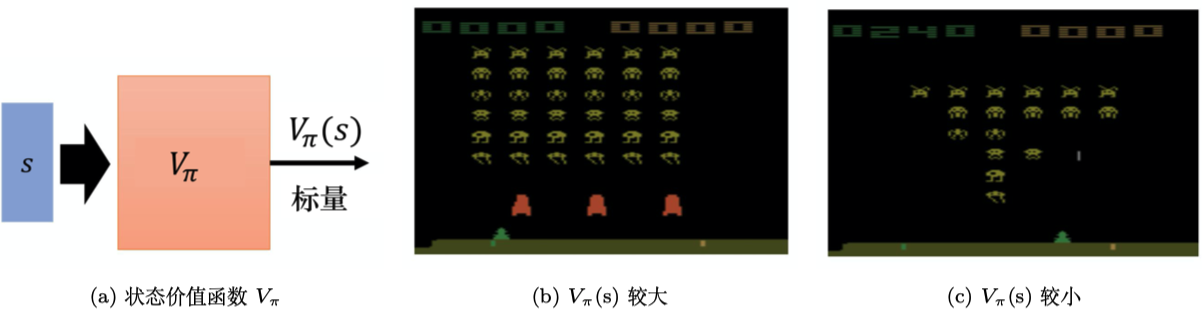
深度Q网络 是基于价值的算法,在基于价值的算法里面,我们学习的不是策略,而是评论员(critic)。评论员的任务是评价现在的动作有多好或有多不好。假设有一个演员,其要学习一个策略来得到尽量高的回报。评论员就是评价演员的策略 π \pi π 好还是不好,即策略评估。例如,有一种评论员称为状态价值函数 V π V_{\pi} Vπ。状态价值函数是指,假设演员的策略是 π \pi π,用 π \pi π 与环境交互,假设 π \pi π 看到了某一个状态 s s s,例如在玩雅达利游戏,状态 s s s 是某一个画面, π \pi π 看到某一个画面,接下来一直到游戏结束,期望的累积奖励有多大。如图 4.1a 所示, V π V_{\pi} Vπ 是一个函数,输入一个状态,它会输出一个标量。这个标量代表演员的策略 π \pi π 看到状态 s s s 的时候,预期到游戏结束的时候,它可以获得多大的奖励。例如,假设我们在玩太空侵略者,图 4.1b 所示的状态 s s s,这个游戏画面, V π ( s ) V_{\pi}(s) Vπ(s) 也许会很大,因为这时还有很多的怪兽可以击杀, 所以我们会得到很高的分数。一直到游戏结束的时候,我们仍然有很多的分数可以获得。图 4.1c 所示的情况我们得到的 V π ( s ) V_{\pi}(s) Vπ(s) 可能就很小,因为剩下的怪兽也不多,并且红色的防护罩已经消失了,所以我们可能很快就会“死掉”。因此接下来得到预期的奖励,就不会太大。
这里需要强调,评论员无法凭空评价一个状态的好坏,它所评价的是在给定某一个状态的时候,如果接下来交互的演员的策略是 π \pi π,我们会得到多少奖励,这个奖励就是我们评价得出的值。因为就算是同样的状态,接下来的 π \pi π 不一样,得到的奖励也是不一样的。例如,在左边的情况下,假设是一个正常的 π \pi π,它可以击杀很多怪兽;假设它是一个很弱的 π \pi π,它就站在原地不动,马上就被射死了,我们得到的 V π ( s ) V_\pi(s) Vπ(s) 还是很小。所以评论员的输出值取决于状态和演员。评论员其实都要绑定一个演员,它是在衡量某一个演员的好坏,而不是衡量一个状态的好坏。这里要强调一下,评论员的输出是与演员有关的,状态的价值其实取决于演员,当演员改变的时候,状态价值函数的输出其实也是会跟着改变的。
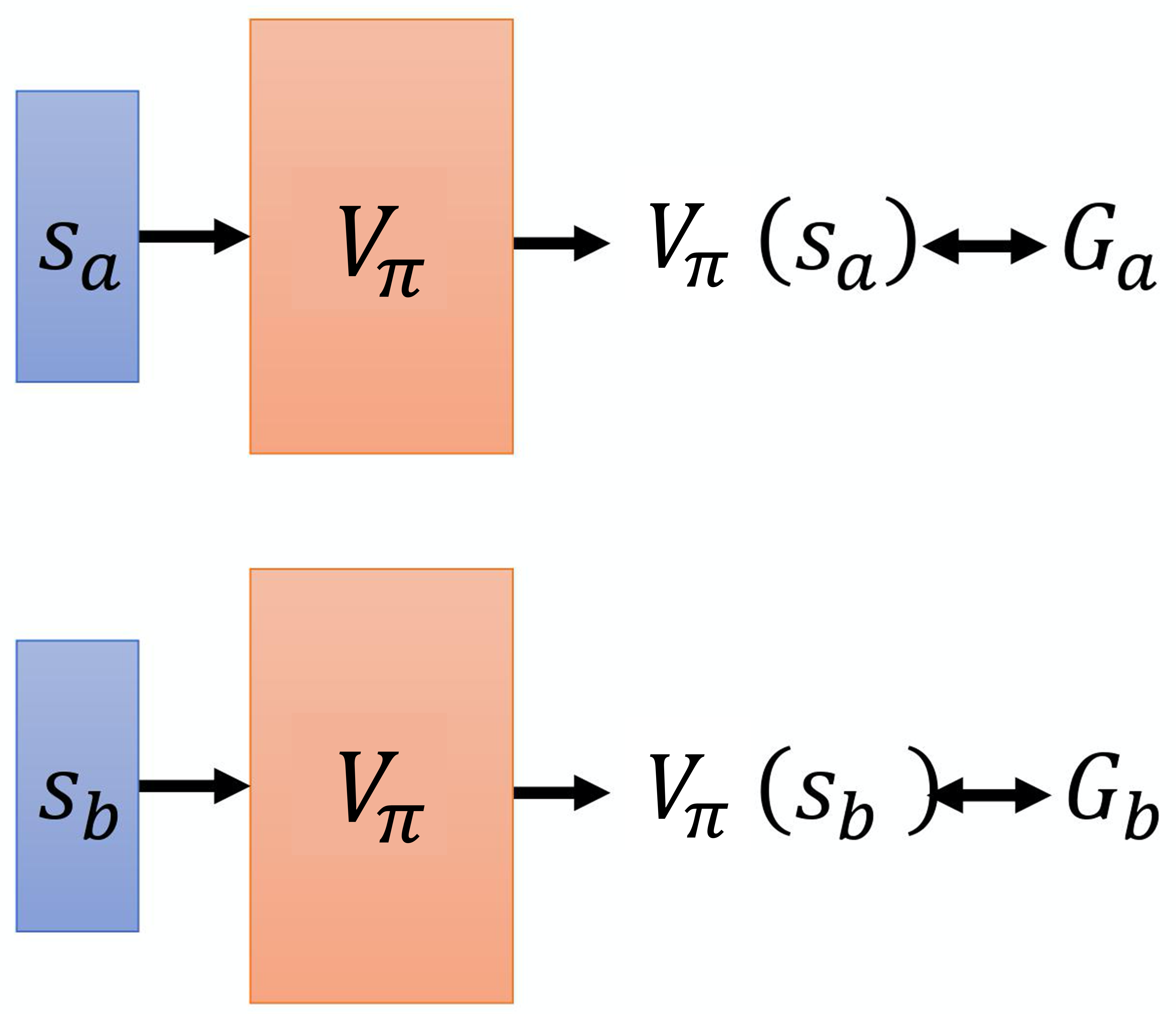
怎么衡量状态价值函数 V π ( s ) V_{\pi}(s) Vπ(s) 呢?有两种不同的方法:基于蒙特卡洛的方法和基于时序差分的方法。基于蒙特卡洛的方法就是让演员与环境交互,我们要看演员好不好,就让演员与环境交互,让评论员评价。评论员就统计,演员如果看到状态 s a s_a sa,接下来的累积奖励有多大;如果它看到状态 s b s_b sb,接下来的累积奖励有多大。但是实际上,我们不可能看到所有的状态。如果我们在玩雅达利游戏,状态是图像,那么无法看到所有的状态。所以实际上 V π ( s ) V_{\pi}(s) Vπ(s) 是一个网络。对一个网络来说,就算输入状态是从来都没有看过的,它也可以想办法估测一个值。怎么训练这个网络呢?如图 4.2 所示,如果在状态 s a s_a sa,接下来的累积奖励就是 G a G_a Ga。也就是对这个价值函数,如果输入是状态 s a s_a sa,正确的输出应该是 G a G_a Ga;如果输入状态是 s b s_b sb,正确的输出应该是 G b G_b Gb。所以在训练的时候, 它就是一个回归问题(regression problem)。网络的输出就是一个值,我们希望在输入 s a s_a sa 的时候,输出的值与 G a G_a Ga 越接近越好;输入 s b s_b sb 的时候,输出的值与 G b G_b Gb 越接近越好。接下来继续训练网络,这是基于蒙特卡洛的方法。
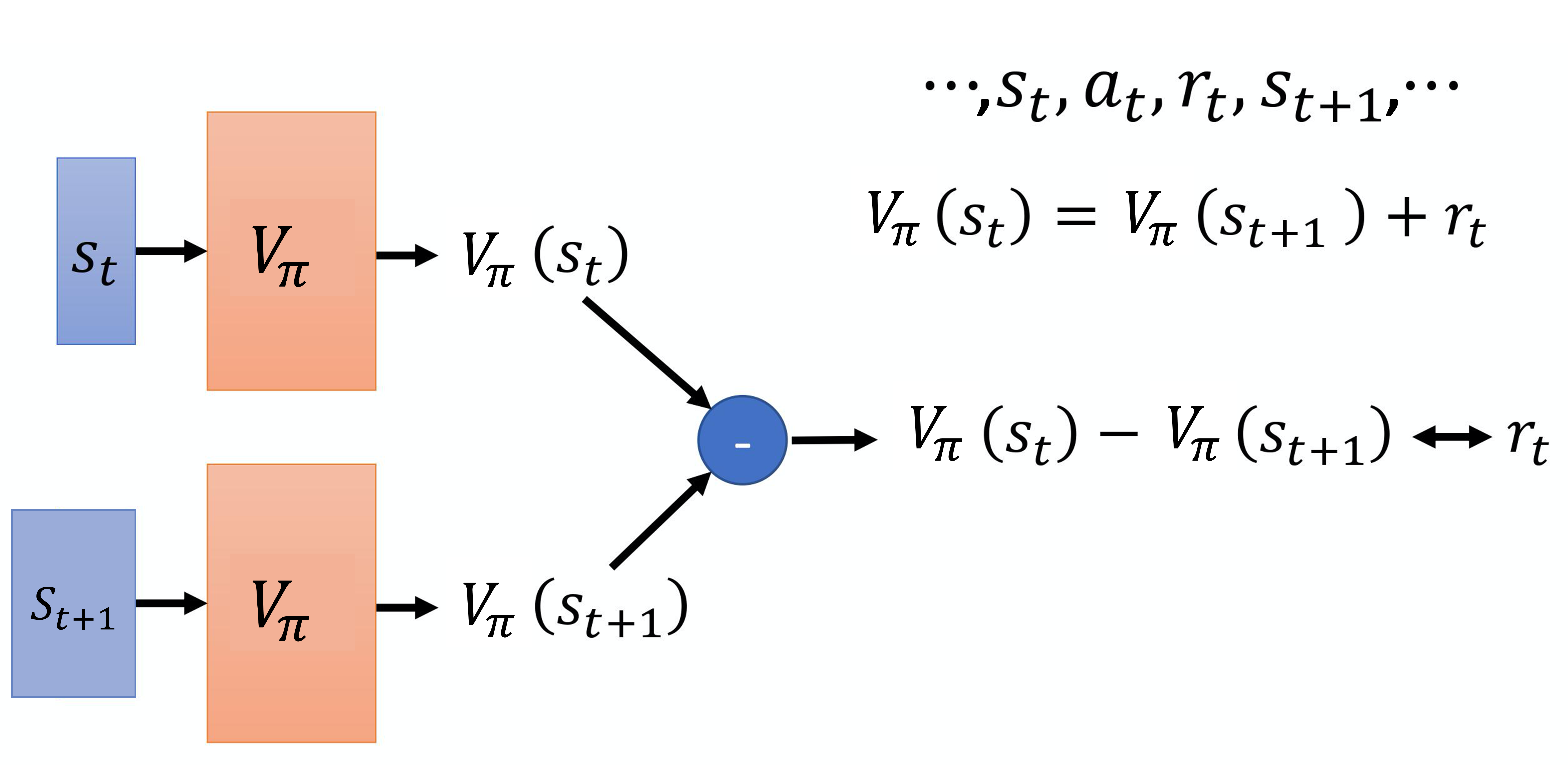
第二个方法是时序差分的方法,即基于时序差分的方法。在基于蒙特卡洛的方法中,每次我们都要计算累积奖励,也就是从某一个状态 s a s_a sa 一直到游戏结束的时候,得到的所有奖励的总和。如果我们要使用基于蒙特卡洛的方法,我们必须至少玩到游戏结束。但有些游戏时间非常长,我们要玩到游戏结束才能够更新网络,这花的时间太多了,因此我们会采用基于时序差分的方法。基于时序差分的方法不需要玩到游戏结束,只需要在游戏的某一个状态 s t s_t st 的时候,采取动作 a t a_t at 得到奖励 r t r_t rt ,接下来进入状态 s t + 1 s_{t+1} st+1,就可以使用时序差分的方法。我们可以通过式(4.1)来使用时序差分的方法。
V π ( s t ) = V π ( s t + 1 ) + r t (4.1) V_{\pi}\left(s_{t}\right)=V_{\pi}\left(s_{t+1}\right)+r_{t} \tag{4.1} Vπ(st)=Vπ(st+1)+rt(4.1)
假设我们现在用的是某一个策略 π \pi π,在状态 s t s_t st时,它会采取动作 a t a_t at,得到奖励 r t r_t rt ,接下来进入 s t + 1 s_{t+1} st+1 。状态 s t + 1 s_{t+1} st+1 的值与状态 s t s_t st 的值,它们的中间差了一项 r t r_t rt,这是因为我们把 s t + 1 s_{t+1} st+1 的值加上得到的奖励 r t r_t rt 就可以 得到 s t s_t st 的值。有了式(4.1),在训练的时候,我们并不是直接估测 V π V_{\pi} Vπ,而是希望得到的结果 V π V_{\pi} Vπ 可以满足式(4.1)。我们是这样训练的,如图 4.3 所示,我们把 s t s_t st 输入网络,因为把 s t s_t st 输入网络会得到 V π ( s t ) V_{\pi}(s_t) Vπ(st),把 s t + 1 s_{t+1} st+1 输入网络会得到 V π ( s t + 1 ) V_{\pi}(s_{t+1}) Vπ(st+1), V π ( s t ) V_{\pi}(s_t) Vπ(st) 减 V π ( s t + 1 ) V_{\pi}(s_{t+1}) Vπ(st+1) 的值应该是 r t r_t rt。我们希望它们相减的损失与 r t r_t rt 接近,训练下去,更新 V π V_{\pi} Vπ 的参数,我们就可以把 V π V_{\pi} Vπ 函数学习出来。
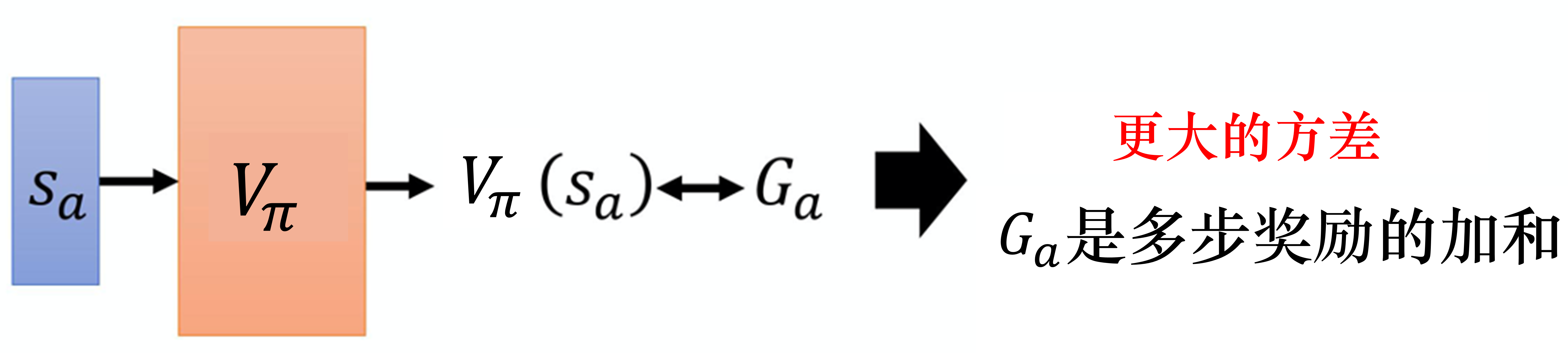
蒙特卡洛方法与时序差分方法有什么差别呢?如图 4.4 所示,蒙特卡洛方法最大的问题就是方差很大。因为我们在玩游戏的时候,游戏本身是有随机性的,所以我们可以把 G a G_a Ga 看成一个随机变量。因为我们每次到 s a s_a sa 的时候,最后得到的 G a G_a Ga 其实是不一样的。我们看到同样的状态 s a s_a sa,最后到游戏结束的时候,因为游戏本身是有随机性的,玩游戏的模型可能也有随机性,所以我们每次得到的 G a G_a Ga 是不一样的,每一次得到的 G a G_a Ga 的差别其实会很大。为什么会很大呢?因为 G a G_a Ga 是很多个不同的步骤的奖励的和。假设我们每一个步骤都会得到一个奖励, G a G_a Ga 是从状态 s a s_a sa 开始一直到游戏结束,每一个步骤的奖励的和。
通过式(4.2),我们知道 G a G_a Ga 的方差相较于某一个状态的奖励,它是比较大的。
Var [ k X ] = k 2 Var [ X ] (4.2) \operatorname{Var}[k X]=k^{2} \operatorname{Var}[X] \tag{4.2} Var[kX]=k2Var[X](4.2)
其中,Var 是指方差(variance)。
如果用时序差分的方法,我们要去最小化
V π ( s t ) ⟷ r + V π ( s t + 1 ) (4.3) V_{\pi}\left(s_{t}\right) \longleftrightarrow r+V_{\pi}\left(s_{t+1}\right) \tag{4.3} Vπ(st)⟷r+Vπ(st+1)(4.3)
其中, r r r具有随机性。因为即使我们在 s t s_t st 采取同一个动作,得到的奖励也不一定是一样的,所以 r r r 是一个随机变量。但 r r r 的方差比 G a G_a Ga 要小,因为 G a G_a Ga 是很多 r r r 的加和,时序差分只是某一个 r r r 而已。 G a G_a Ga 的方差会比较大, r r r 的方差会比较小。但是这里我们会遇到的一个问题是 V π V_{\pi} Vπ 的估计不一定准确。假设 V π V_{\pi} Vπ 的估计不准确,我们使用式(4.3)学习出来的结果也会是不准确的。所以蒙特卡洛方法与时序差分方法各有优劣。其实时序差分方法是比较常用的,蒙特卡洛方法其实是比较少用的。
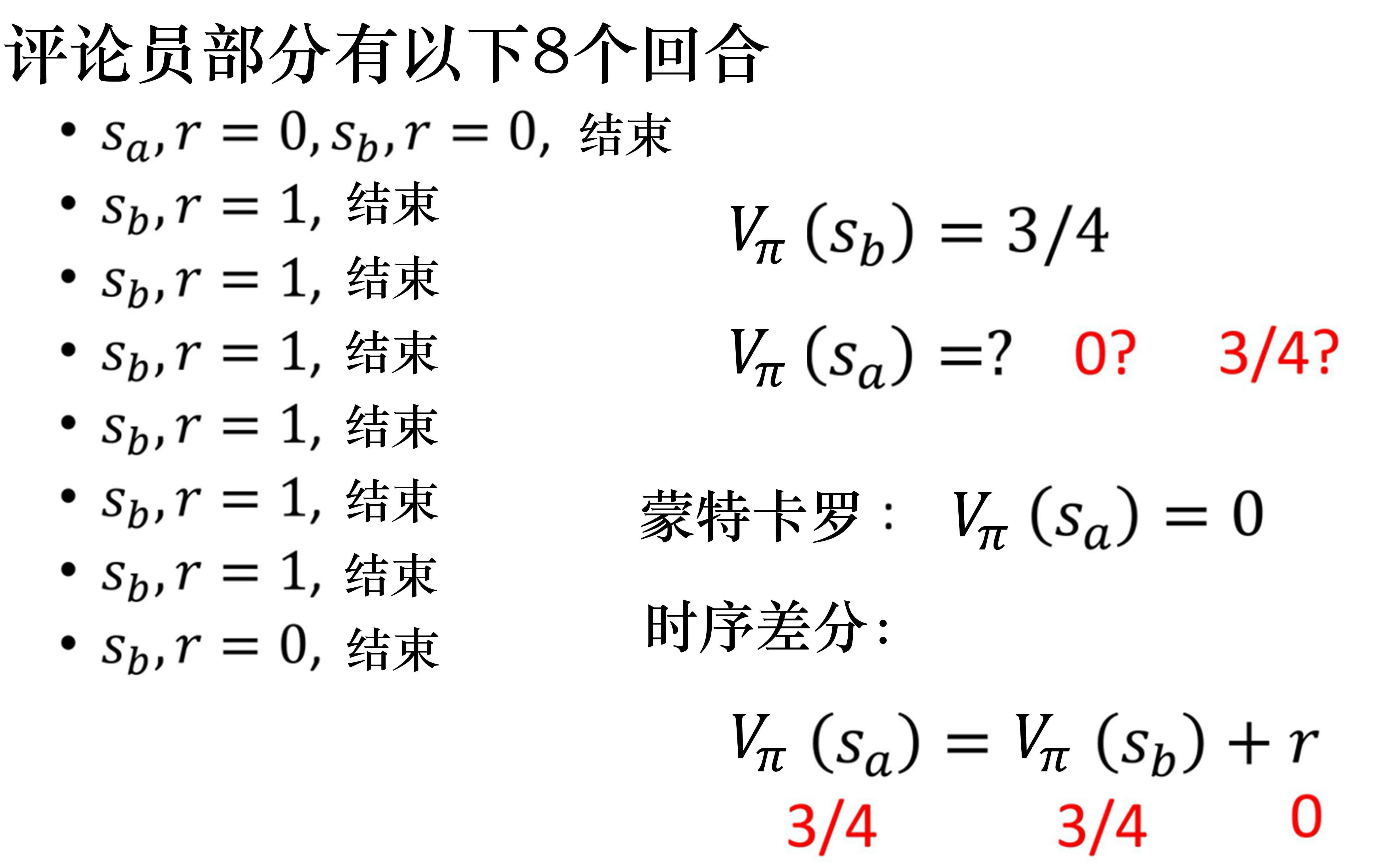
图 4.5 所示为时序差分方法与蒙特卡洛方法的差别。假设有某一个评论员,它去观察某一个策略 π \pi π 与环境交互 8 个回合的结果。有一个策略 π \pi π 与环境交互了8 次,得到了 8 次玩游戏的结果。接下来这个评论员去估测状态的值。
我们先计算 s b s_b sb 的值。 状态 s b s_b sb 在 8 场游戏里都存在,其中有 6 场得到奖励 1,有 2 场得到奖励 0。所以如果我们要计算期望值,只算智能体看到状态 s b s_b sb 以后得到的奖励。智能体一直玩到游戏结束的时候得到的累积奖励期望值是 3/4,计算过程为
6 × 1 + 2 × 0 8 = 6 8 = 3 4 \frac{6 \times 1 + 2 \times 0}{8}=\frac{6}{8}=\frac{3}{4} 86×1+2×0=86=43
但 s a s_a sa 期望的奖励到底应该是多少呢?这里其实有两个可能的答案:0 和 3/4。为什么有两个可能的答案呢?这取决于我们用蒙特卡洛方法还是时序差分方法。用 蒙特卡洛方法与用 时序差分方法 算出来的结果是不一样的。
假如我们用蒙特卡洛方法, s a s_a sa 就出现一次,看到状态 s a s_a sa ,接下来累积奖励就是 0,所以 s a s_a sa 期望奖励就是 0。但时序差分方法在计算的时候,需要更新
V π ( s a ) = V π ( s b ) + r V_{\pi}\left(s_{a}\right)=V_{\pi}\left(s_{b}\right)+r Vπ(sa)=Vπ(sb)+r
因为我们在状态 s a s_a sa 得到奖励 r = 0 r=0 r=0 以后,进入状态 s b s_b sb,所以状态 s a s_a sa 的奖励等于状态 s b s_b sb 的奖励加上从状态 s a s_a sa 进入状态 s b s_b sb 的时候可能得到的奖励 r r r。而得到的奖励 r r r 的值是 0, s b s_b sb 期望奖励是 3/4,那么 s a s_a sa 的奖励应该是 3/4。
用蒙特卡洛方法与时序差分方法估出来的结果很有可能是不一样的。就算评论员观察到一样的训练数据,它最后估出来的结果也不一定是一样的。为什么会这样呢?哪一个结果比较对呢?其实都对。因为在第一个轨迹中, s a s_a sa 得到奖励 0 以后,再进入 s b s_b sb 也得到奖励 0。这里有两个可能。
(1) s a s_a sa 是一个标志性的状态,只要看到 s a s_a sa 以后, s b s_b sb 就不会获得奖励, s a s_a sa 可能影响了 s b s_b sb。如果是使用蒙特卡洛方法,它会把 s a s_a sa 影响 s b s_b sb 这件事考虑进去。所以看到 s a s_a sa 以后,接下来 s b s_b sb 就得不到奖励, s b s_b sb 期望的奖励是 0。
(2)看到 s a s_a sa 以后, s b s_b sb 的奖励是 0 这件事只是巧合,并不是 s a s_a sa 造成的,而是因为 s b s_b sb 有时候就是会得到奖励 0,这只是单纯“运气”的问题。其实平常 s b s_b sb 会得到的奖励期望值是 3/4,与 s a s_a sa 是完全没有关系的。所以假设 s a s_a sa 之后会进入 s b s_b sb,得到的奖励按照时序差分方法来算应该是 3/4。
不同的方法考虑了不同的假设,所以运算结果不同。
2 动作价值函数
还有另外一种评论员称为Q函数,它又被称为动作价值函数。状态价值函数的输入是一个状态,它根据状态计算出这个状态以后的期望的累积奖励(expected accumulated reward)是多少。动作价值函数的输入是一个状态-动作对,其指在某一个状态采取某一个动作,假设我们都使用策略 π \pi π ,得到的累积奖励的期望值有多大。
Q函数有一个需要注意的问题是,策略 π \pi π在看到状态 s s s 的时候,它采取的动作不一定是 a a a。Q函数假设在状态 s s s 强制采取动作 a a a,而不管我们现在考虑的策略 π \pi π会不会采取动作 a a a,这并不重要。在状态 s s s 强制采取动作 a a a。接下来都用策略 π \pi π 继续玩下去,就只有在状态 s s s,我们才强制一定要采取动作 a a a,接下来就进入自动模式,让策略 π \pi π 继续玩下去,得到的期望奖励才是 Q π ( s , a ) Q_{\pi}(s,a) Qπ(s,a) 。
Q函数有两种写法:
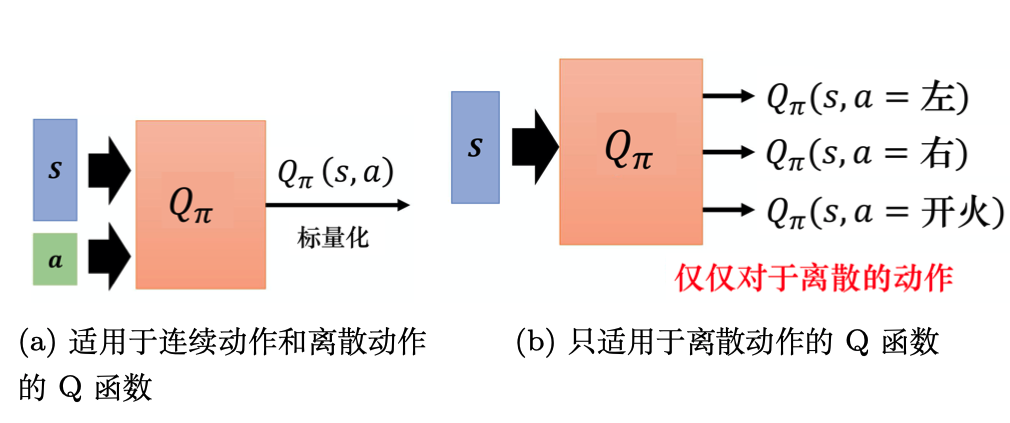
(1)如图 4.7a 所示,输入是状态与动作,输出就是一个标量。这种Q函数既适用于连续动作(动作是无法穷举的),又适用于离散动作。
(2)如图 4.7b 所示,输入是一个状态,输出就是多个值。这种Q函数只适用于离散动作。假设动作是离散的,比如动作就只有 3 个可能:往左、往右或是开火。Q函数输出的 3 个值就分别代表 a a a 是往左的时候的 Q 值, a a a 是往右的时候的 Q 值,还有 a a a 是开火的时候的 Q 值。
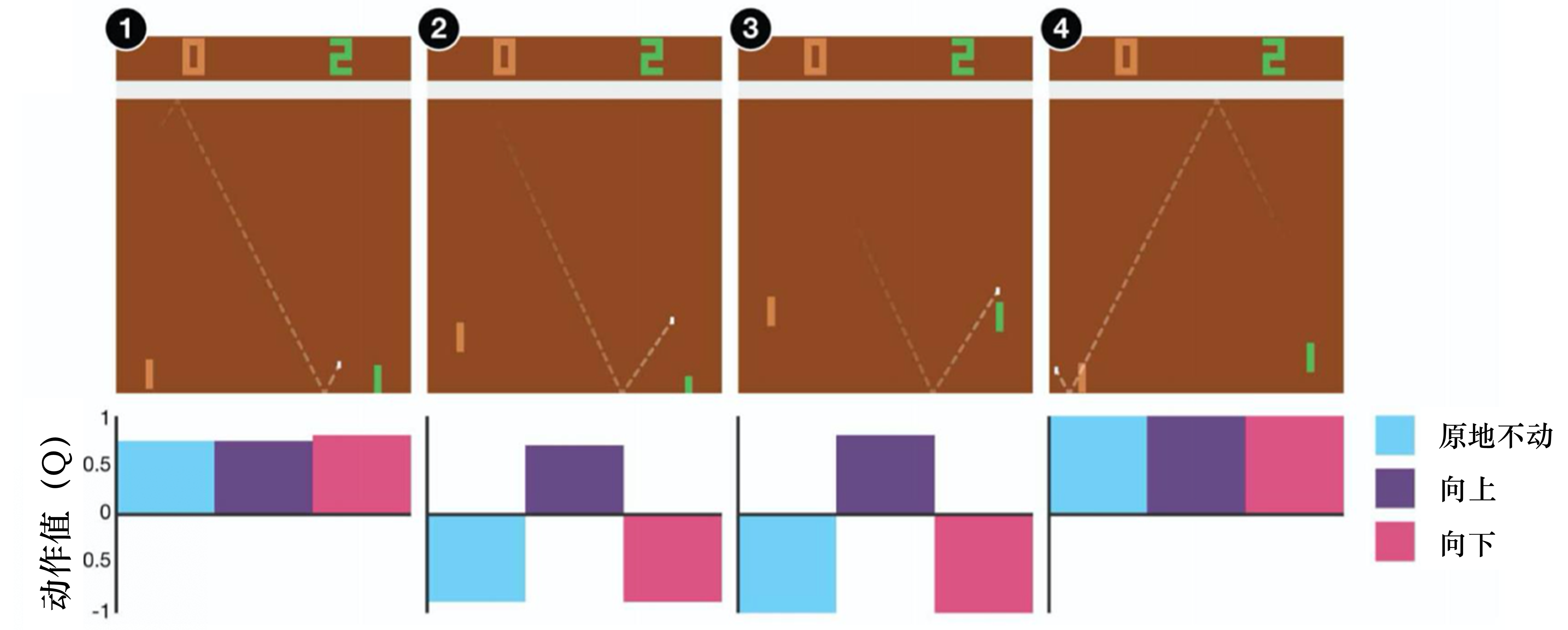
如果我们去估计Q函数,看到的结果可能如图 4.7 所示。假设我们有 3 个动作:原地不动、向上、向下。假设在第一个状态,不管采取哪个动作,最后到游戏结束的时候,得到的期望奖励都差不多。因为乒乓球在这个地方时,就算我们向下,接下来我们应该还可以接到乒乓球,所以不管采取哪个动作,都相差不了太多。假设在第二个状态,乒乓球已经反弹到很接近边缘的地方,这个时候我们采取向上的动作,才能接到乒乓球,才能得到正的奖励。如果我们站在原地不动或向下,接下来都会错过这个乒乓球,得到的奖励就会是负的。假设在第三个状态,乒乓球离我们的球拍很近了,所以就要采取向上的动作。假设在第四个状态,乒乓球被反弹回去,这时候采取哪个动作都差不多。这是动作价值函数的例子。
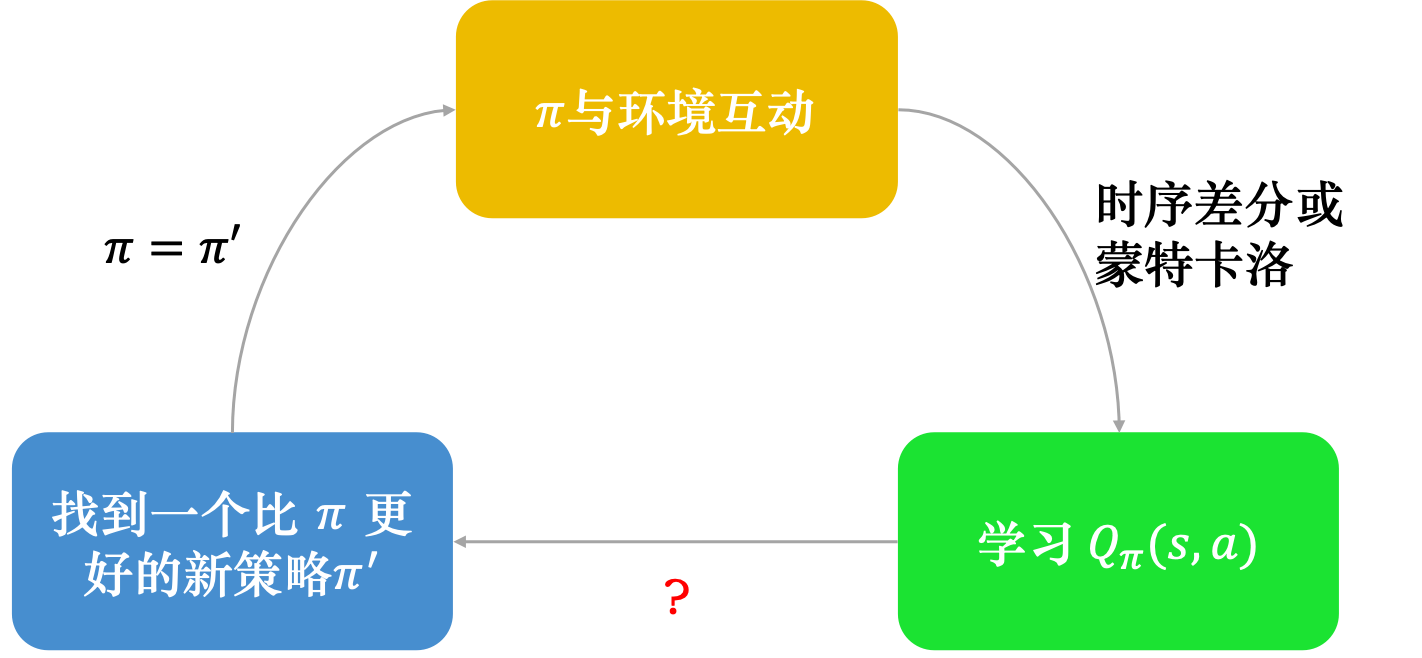
虽然我们学习的Q函数只能用来评估某一个策略 π \pi π 的好坏,但只要有了 Q函数,我们就可以进行强化学习,就可以决定要采取哪一个动作,就可以进行策略改进。如图 4.8 所示,假设我们有一个初始的演员,也许一开始很差,随机的也没有关系。初始的演员称为 π \pi π, π \pi π 与环境交互,会收集数据。接下来我们学习策略 π \pi π的 Q 值,去衡量一下 π \pi π 在某一个状态强制采取某一个动作,接下来会得到的期望奖励,用时序差分方法或蒙特卡洛方法都是可以的。我们学习出一个Q函数以后,就可以找到一个新的策略 π ′ \pi' π′ ,策略 π ′ \pi' π′ 会比原来的策略 π \pi π 要好(稍后会定义什么是好)。所以假设我们有一个Q函数和某一个策略 π \pi π,根据策略 π \pi π 学习出策略 π \pi π 的Q函数,接下来可以找到一个新的策略 π ′ \pi' π′,它会比 π \pi π 要好。我们用 π ′ \pi' π′ 取代 π \pi π,再去学习它的 Q 函数,得到新的Q函数以后,再去寻找一个更好的策略。这样一直循环下去,策略就会越来越好。
首先要定义的是什么是好。 π ′ \pi' π′ 一定会比 π \pi π 要好,什么是好呢?这里的好是指,对所有可能的状态 s s s 而言, V π ′ ( s ) ⩾ V π ( s ) V_{\pi^{\prime}}(s) \geqslant V_{\pi}(s) Vπ′(s)⩾Vπ(s)。也就是我们到同一个状态 s s s 的时候,如果用 π \pi π 继续与环境交互,我们得到的奖励一定会小于等于用 π ′ \pi' π′ 与环境交互得到的奖励。所以不管在哪一个状态,我们用 π ′ \pi' π′ 与环境交互,得到的期望奖励一定会比较大。所以 π ′ \pi' π′ 是比 π \pi π 要好的策略。
有了Q函数以后,我们把根据式(4.4)决定动作的策略称为 π ′ \pi' π′,
π ′ ( s ) = arg max a Q π ( s , a ) (4.4) \pi^{\prime}(s)=\underset{a}{\arg \max} Q_{\pi}(s, a) \tag{4.4} π′(s)=aargmaxQπ(s,a)(4.4)
π ′ \pi' π′ 一定比 π \pi π 好。假设我们已经学习出 π \pi π 的Q函数,在某一个状态 s s s,把所有可能的动作 a a a 一一代入 Q 函数,看看哪一个 a a a 可以让Q函数的值最大,这个动作就是 π ′ \pi' π′ 会采取的动作。
这里要注意,给定状态 s s s 和策略 π \pi π 并不一定会采取动作 a a a。给定某一个状态 s s s 强制采取动作 a a a,用 π \pi π 继续交互得到的期望奖励,这才是Q函数的定义。所以在状态 s s s 下不一定会采取动作 a a a。用 π ′ \pi' π′ 在状态 s s s 采取动作 a a a 与用 π \pi π 采取的动作不一定是一样的, π ′ \pi' π′ 所采取的动作会让它得到比较大的奖励。所以 π ′ \pi' π′ 是用Q函数推出来的,没有另外一个网络决定 π ′ \pi' π′ 怎么与环境交互,有Q函数 就可以找出 π ′ \pi' π′。但是在这里要解决一个 arg max 操作的问题,如果 a a a 是离散的,如 a a a 只有 3 个选项,将每个动作都代入Q函数,看哪个动作的 Q 值最大,这没有问题。但如果 a a a 是连续的,我们要解决 arg max 操作问题,就不可行。
接下来讲一下为什么用 Q π ( s , a ) Q_{\pi}(s,a) Qπ(s,a) 决定的 π ′ \pi' π′ 一定会比 π \pi π 好。假设有一个策略 π ′ \pi' π′,它是由 Q π Q_{\pi} Qπ 决定的。我们要证明对所有的状态 s s s ,有 V π ′ ( s ) ⩾ V π ( s ) V_{\pi^{\prime}}(s) \geqslant V_{\pi}(s) Vπ′(s)⩾Vπ(s)。
怎么证明呢? V π ( s ) V_{\pi}(s) Vπ(s) 可写为
V π ( s ) = Q π ( s , π ( s ) ) V_{\pi}(s)=Q_{\pi}(s, \pi(s)) Vπ(s)=Qπ(s,π(s))
假设在状态 s s s 下按照策略 π \pi π,会采取的动作就是 π ( s ) \pi(s) π(s),我们算出来的 Q π ( s , π ( s ) ) Q_{\pi}(s, \pi(s)) Qπ(s,π(s)) 会等于 V π ( s ) V_{\pi}(s) Vπ(s)。一般而言, Q π ( s , π ( s ) ) Q_{\pi}(s, \pi(s)) Qπ(s,π(s)) 不一定等于 V π ( s ) V_{\pi}(s) Vπ(s) ,因为动作不一定是 π ( s ) \pi(s) π(s)。但如果这个动作是 π ( s ) \pi(s) π(s) , Q π ( s , π ( s ) ) Q_{\pi}(s, \pi(s)) Qπ(s,π(s)) 是等于 V π ( s ) V_{\pi}(s) Vπ(s) 的。
Q π ( s , π ( s ) ) Q_{\pi}(s, \pi(s)) Qπ(s,π(s)) 还满足如下的关系:
Q π ( s , π ( s ) ) ⩽ max a Q π ( s , a ) Q_{\pi}(s, \pi(s)) \leqslant \max _{a} Q_{\pi}(s, a) Qπ(s,π(s))⩽amaxQπ(s,a)
因为 a a a 是所有动作里面可以让 Q 函数取最大值的那个动作,所以 Q π ( s , a ) Q_{\pi}(s, a) Qπ(s,a)一定大于等于 Q π ( s , π ( s ) ) Q_{\pi}(s, \pi(s)) Qπ(s,π(s))。 Q π ( s , a ) Q_{\pi}(s, a) Qπ(s,a) 中的 a a a 就是 π ′ ( s ) \pi'(s) π′(s),因为 π ′ ( s ) \pi'(s) π′(s) 输出的 a a a 可以让 Q π ( s , a ) Q_\pi(s,a) Qπ(s,a) 最大,所以我们可得
max a Q π ( s , a ) = Q π ( s , π ′ ( s ) ) \max _{a} Q_{\pi}(s, a)=Q_{\pi}\left(s, \pi^{\prime}(s)\right) amaxQπ(s,a)=Qπ(s,π′(s))
于是
V π ( s ) ⩽ Q π ( s , π ′ ( s ) ) V_{\pi}(s) \leqslant Q_{\pi}\left(s, \pi^{\prime}(s)\right) Vπ(s)⩽Qπ(s,π′(s))
也就是在某一个状态,如果我们按照策略 π \pi π 一直执行下去,得到的奖励一定会小于等于在状态 s s s 故意不按照 π \pi π 所指示的方向,而是按照 π ′ \pi' π′ 的方向走一步得到的奖励。但只有第一步是按照 π ′ \pi' π′ 的方向走,只有在状态 s s s,才按照 π ′ \pi' π′ 的指示走,接下来我们就按照 π \pi π 的指示走。虽然只有一步之差,但我们得到的奖励一定会比完全按照 π \pi π 得到的奖励要大。
接下来要证
Q π ( s , π ′ ( s ) ) ⩽ V π ′ ( s ) Q_{\pi}\left(s, \pi^{\prime}(s) \right) \leqslant V_{\pi'}(s) Qπ(s,π′(s))⩽Vπ′(s)
也就是,只有一步之差,我们会得到比较大的奖励。但假设每步都是不一样的,每步都按照 π ′ \pi' π′ 而不是 π \pi π,得到的奖励一定会更大,即 Q π ( s , π ′ ( s ) ) Q_{\pi}\left(s, \pi^{\prime}(s)\right) Qπ(s,π′(s))是指我们在状态 s t s_t st 采取动作 a t a_t at,得到奖励 r t r_{t} rt,进入状态 s t + 1 s_{t+1} st+1,即
Q π ( s , π ′ ( s ) ) = E [ r t + V π ( s t + 1 ) ∣ s t = s , a t = π ′ ( s t ) ] Q_{\pi}\left(s, \pi^{\prime}(s)\right)=\mathbb{E}\left[r_t+V_{\pi}\left(s_{t+1}\right) \mid s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] Qπ(s,π′(s))=E[rt+Vπ(st+1)∣st=s,at=π′(st)]
有的文献上也会说:在状态 s t s_t st 采取动作 a t a_t at,得到奖励 r t + 1 r_{t+1} rt+1。但意思其实都是一样的。在状态 s s s 按照 π ′ \pi' π′ 采取某一个动作 a t a_t at ,得到奖励 r t r_{t} rt,进入状态 s t + 1 s_{t+1} st+1, V π ( s t + 1 ) V_{\pi}\left(s_{t+1}\right) Vπ(st+1) 是状态 s t + 1 s_{t+1} st+1 根据策略 π \pi π 所估出来的值。因为在同样的状态采取同样的动作,我们得到的奖励和会进入的状态不一定一样, 所以需要取期望值。
因为 V π ( s ) ⩽ Q π ( s , π ′ ( s ) ) V_{\pi}(s) \leqslant Q_{\pi}\left(s, \pi^{\prime}(s)\right) Vπ(s)⩽Qπ(s,π′(s)),也就是 V π ( s t + 1 ) ⩽ Q π ( s t + 1 , π ′ ( s t + 1 ) ) V_{\pi}(s_{t+1}) \leqslant Q_{\pi}\left(s_{t+1}, \pi^{\prime}(s_{t+1})\right) Vπ(st+1)⩽Qπ(st+1,π′(st+1)),所以我们可得
E [ r t + V π ( s t + 1 ) ∣ s t = s , a t = π ′ ( s t ) ] ⩽ E [ r t + Q π ( s t + 1 , π ′ ( s t + 1 ) ) ∣ s t = s , a t = π ′ ( s t ) ] \begin{array}{l} \mathbb{E}\left[r_{t}+V_{\pi}\left(s_{t+1}\right) | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \\ \leqslant \mathbb{E}\left[r_{t}+Q_{\pi}\left(s_{t+1}, \pi^{\prime}\left(s_{t+1}\right)\right) | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \end{array} E[rt+Vπ(st+1)∣st=s,at=π′(st)]⩽E[rt+Qπ(st+1,π′(st+1))∣st=s,at=π′(st)]
因为 Q π ( s t + 1 , π ′ ( s t + 1 ) ) = r t + 1 + V π ( s t + 2 ) Q_{\pi}\left(s_{t+1}, \pi^{\prime}\left(s_{t+1}\right)\right) = r_{t+1}+V_{\pi}\left(s_{t+2}\right) Qπ(st+1,π′(st+1))=rt+1+Vπ(st+2),所以我们可得
E [ r t + Q π ( s t + 1 , π ′ ( s t + 1 ) ) ∣ s t = s , a t = π ′ ( s t ) ] = E [ r t + r t + 1 + V π ( s t + 2 ) ∣ s t = s , a t = π ′ ( s t ) ] (4.5) \begin{array}{l} \mathbb{E}\left[r_{t}+Q_{\pi}\left(s_{t+1}, \pi^{\prime}\left(s_{t+1}\right)\right) | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \\ =\mathbb{E}\left[r_{t}+r_{t+1}+V_{\pi}\left(s_{t+2}\right) | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \end{array} \tag{4.5} E[rt+Qπ(st+1,π′(st+1))∣st=s,at=π′(st)]=E[rt+rt+1+Vπ(st+2)∣st=s,at=π′(st)](4.5)
我们再把式(4.5)代入 V π ( s ) ⩽ Q π ( s , π ′ ( s ) ) V_{\pi}(s) \leqslant Q_{\pi}\left(s, \pi^{\prime}(s)\right) Vπ(s)⩽Qπ(s,π′(s)),一直算到回合结束,即
V π ( s ) ≤ Q π ( s , π ′ ( s ) ) = E [ r t + V π ( s t + 1 ) ∣ s t = s , a t = π ′ ( s t ) ] ≤ E [ r t + Q π ( s t + 1 , π ′ ( s t + 1 ) ) ∣ s t = s , a t = π ′ ( s t ) ] = E [ r t + r t + 1 + V π ( s t + 2 ) ∣ s t = s , a t = π ′ ( s t ) ] ≤ E [ r t + r t + 1 + Q π ( s t + 2 , π ′ ( s t + 2 ) ∣ s t = s , a t = π ′ ( s t ) ] = E [ r t + r t + 1 + r t + 2 + V π ( s t + 3 ) ∣ s t = s , a t = π ′ ( s t ) ] ≤ ⋯ ≤ E [ r t + r t + 1 + r t + 2 + ⋯ ∣ s t = s , a t = π ′ ( s t ) ] = V π ′ ( s ) \begin{aligned} V^{\pi}(s) &\le Q^{\pi}(s,\pi'(s)) \\ &=E\left[r_{t}+V^{\pi}\left(s_{t+1}\right) | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right]\\ &\le E\left[r_{t}+Q^{\pi}\left(s_{t+1}, \pi^{\prime}\left(s_{t+1}\right)\right) | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \\ &=E\left[r_{t}+r_{t+1}+V^{\pi}\left(s_{t+2}\right) |s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \\ & \le E\left[r_{t}+r_{t+1}+Q^{\pi}\left(s_{t+2},\pi'(s_{t+2}\right) | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \\ & = E\left[r_{t}+r_{t+1}+r_{t+2}+V^{\pi}\left(s_{t+3}\right) |s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \\ & \le \cdots\\ & \le E\left[r_{t}+r_{t+1}+r_{t+2}+\cdots | s_{t}=s, a_{t}=\pi^{\prime}\left(s_{t}\right)\right] \\ & = V^{\pi'}(s) \end{aligned} Vπ(s)≤Qπ(s,π′(s))=E[rt+Vπ(st+1)∣st=s,at=π′(st)]≤E[rt+Qπ(st+1,π′(st+1))∣st=s,at=π′(st)]=E[rt+rt+1+Vπ(st+2)∣st=s,at=π′(st)]≤E[rt+rt+1+Qπ(st+2,π′(st+2)∣st=s,at=π′(st)]=E[rt+rt+1+rt+2+Vπ(st+3)∣st=s,at=π′(st)]≤⋯≤E[rt+rt+1+rt+2+⋯∣st=s,at=π′(st)]=Vπ′(s)
因此
V π ( s ) ⩽ V π ′ ( s ) V_{\pi}(s)\leqslant V_{\pi'}(s) Vπ(s)⩽Vπ′(s)
我们可以估计某一个策略的Q函数,接下来就可以找到另外一个策略 π ′ \pi' π′ 比原来的策略 π \pi π还要更好。
3 目标网络
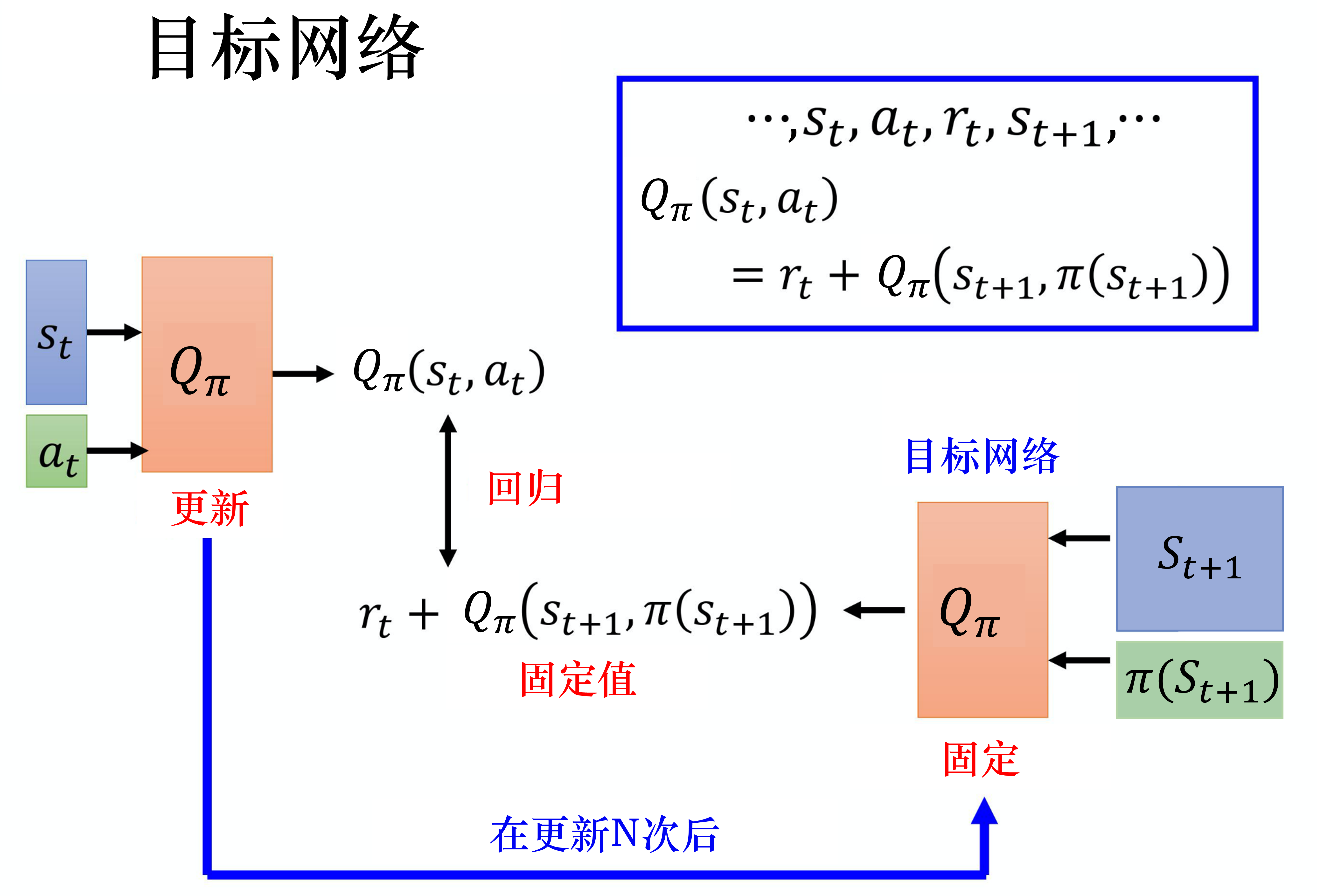
接下来讲一些在 深度Q网络 里一定会用到的技巧。第一个技巧是目标网络(target network)。我们在学习Q函数的时候,也会用到时序差分方法的概念。我们现在收集到一个数据,比如在状态 s t s_t st 采取动作 a t a_t at 以后,得到奖励 r t r_t rt ,进入状态 s t + 1 s_{t+1} st+1。根据Q函数,我们可知
Q π ( s t , a t ) = r t + Q π ( s t + 1 , π ( s t + 1 ) ) Q_{\pi}\left(s_{t}, a_{t}\right) =r_{t}+Q_{\pi}\left(s_{t+1}, \pi\left(s_{t+1}\right)\right) Qπ(st,at)=rt+Qπ(st+1,π(st+1))
所以我们在学习的时候,Q 函数输入 s t s_t st、 a t a_t at 得到的值,与输入 s t + 1 s_{t+1} st+1、 π ( s t + 1 ) \pi (s_{t+1}) π(st+1) 得到的值之间,我们希望它们相差 r t r_t rt, 这与时序差分方法的概念是一样的。但是实际上这样的输入并不好学习,假设这是一个回归问题,如图 4.9 所示, Q π ( s t , a t ) Q_{\pi}\left(s_{t}, a_{t}\right) Qπ(st,at) 是网络的输出, r t + Q π ( s t + 1 , π ( s t + 1 ) ) r_{t}+Q_{\pi}\left(s_{t+1}, \pi\left(s_{t+1}\right)\right) rt+Qπ(st+1,π(st+1)) 是目标,目标是会变动的。当然如果我们要实现这样的训练,其实也没有问题,就是在做反向传播的时候, Q π Q_{\pi} Qπ 的参数会被更新,我们会把两个更新的结果加在一起(因为它们是同一个模型 Q π Q_{\pi} Qπ, 所以两个更新的结果会加在一起)。但这样会导致训练变得不太稳定,因为假设我们把 Q π ( s t , a t ) Q_{\pi}\left(s_{t}, a_{t}\right) Qπ(st,at) 当作模型的输出, 把 r t + Q π ( s t + 1 , π ( s t + 1 ) ) r_{t}+Q_{\pi}\left(s_{t+1}, \pi\left(s_{t+1}\right)\right) rt+Qπ(st+1,π(st+1)) 当作目标,我们要去拟合的目标是一直在变动的,这是不太好训练的。
所以我们会把其中一个 Q 网络,通常是把图 4.9 右边的 Q 网络固定住。在训练的时候,我们只更新左边的 Q 网络的参数,而右边的 Q 网络的参数会被固定。因为右边的 Q 网络负责产生目标,所以被称为目标网络。因为目标网络是固定的,所以现在得到的目标 r t + Q π ( s t + 1 , π ( s t + 1 ) ) r_{t}+Q_{\pi}\left(s_{t+1}, \pi\left(s_{t+1}\right)\right) rt+Qπ(st+1,π(st+1)) 的值也是固定的。我们只调整左边Q网络的参数,它就变成一个回归问题。我们希望模型输出的值与目标越接近越好,这样会最小化它的均方误差(mean square error)。
在实现的时候,我们会把左边的 Q 网络更新多次,再用更新过的 Q 网络替换目标网络。但这两个网络不要一起更新,一起更新,结果会很容易不好。一开始这两个网络是一样的,在训练的时候,我们会把右边的 Q 网络固定住,在做梯度下降的时候,只调整左边Q网络的参数。我们可能更新 100 次以后才把参数复制到右边的网络中,把右边网络的参数覆盖,目标值就变了。就好像我们本来在做一个回归问题,训练后把这个回归问题的损失降下去以后,接下来我们把左边网络的参数复制到右边网络,目标值就变了,接下来就要重新训练。
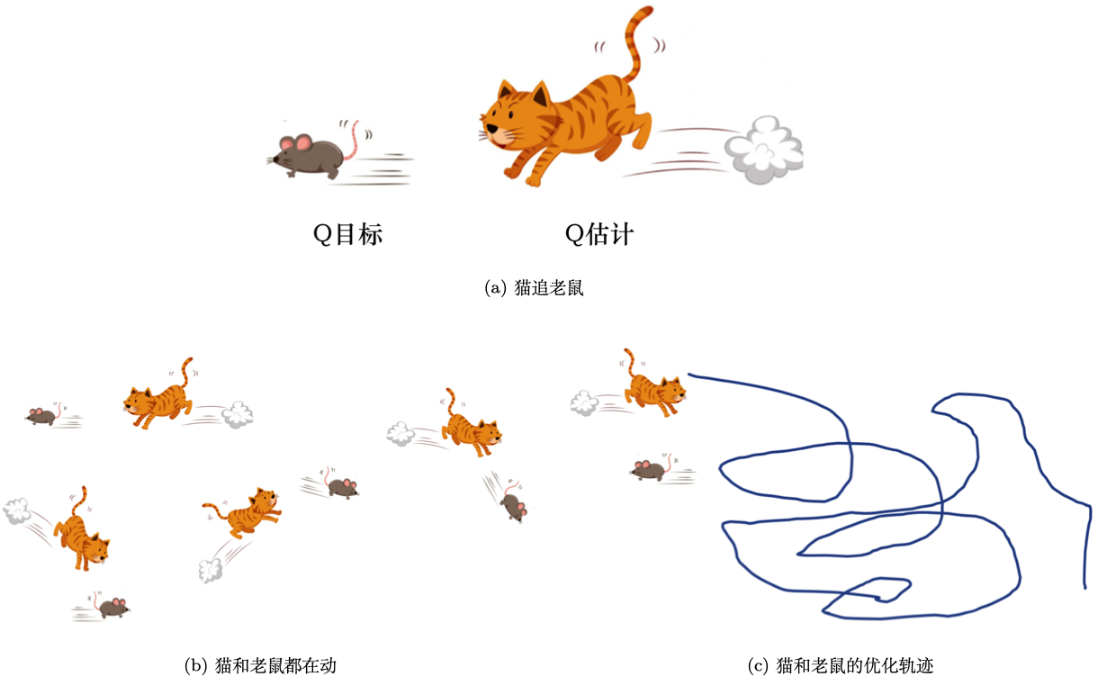
如图 4.10a 所示,我们可以通过猫追老鼠的例子来直观地理解固定目标网络的目的。猫是 Q 估计,老鼠是 Q 目标。一开始,猫离老鼠很远,所以我们想让猫追上老鼠。如图 4.10b 所示,因为 Q 目标也是与模型参数相关的,所以每次优化后,Q 目标也会动。这就导致一个问题,猫和老鼠都在动。如图 4.10c 所示,猫和老鼠会在优化空间里面到处乱动,这会产生非常奇怪的优化轨迹,使得训练过程十分不稳定。所以我们可以固定 Q 网络,让老鼠动得不那么频繁,可能让它每 5 步动一次,猫则是每一步都在动。如果老鼠每 5 次动一步,猫就有足够的时间来接近老鼠,它们之间的距离会随着优化过程越来越小,最后它们就可以拟合,拟合后就可以得到一个最好的Q 网络。
4 探索
第二个技巧是探索。当我们使用 Q 函数的时候,策略完全取决于 Q 函数。给定某一个状态,我们就穷举所有的动作,采取让Q值最大的动作,即
a = arg max a Q ( s , a ) a=\underset{a}{\arg \max} Q(s, a) a=aargmaxQ(s,a)
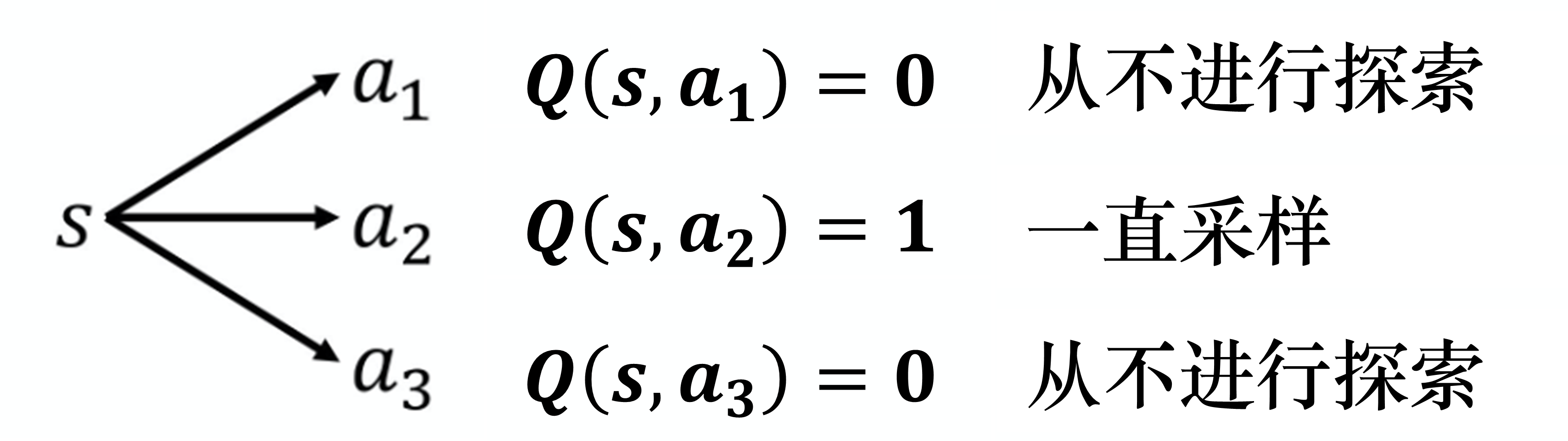
使用Q函数来决定动作与使用策略梯度不一样,策略梯度的输出是随机的,它会输出一个动作的分布,我们根据这个动作的分布去采样,所以在策略梯度里面,我们每次采取的动作是不一样的,是有随机性的。像Q函数中,如果我们采取的动作总是固定的,会遇到的问题就是这不是一个好的收集数据的方式。假设我们要估测某一个状态,可以采取动作 a 1 a_{1} a1、 a 2 a_{2} a2、 a 3 a_{3} a3。我们要估测在某一个状态采取某一个动作会得到的 Q 值,一定要在那一个状态采取过那一个动作,才能估测出它的值。如果没有在那个状态采取过那个动作,我们其实是估测不出它的值的。如果Q函数是一个网络,这个问题可能没有那么严重。但是一般而言,假设Q函数是一个表格,对于没有见过的状态-动作对,它是估不出值的。如果 Q 函数是网络,也会有类似的问题,只是没有那么严重。所以假设我们在某一个状态,动作 a 1 a_{1} a1、 a 2 a_{2} a2、 a 3 a_{3} a3 都没有采取过,估出来的 Q ( s , a 1 ) Q(s,a_{1}) Q(s,a1)、 Q ( s , a 2 ) Q(s,a_{2}) Q(s,a2)、 Q ( s , a 3 ) Q(s,a_{3}) Q(s,a3) 的值可能都是一样的,都是一个初始值,比如 0,即
Q ( s , a 1 ) = 0 Q ( s , a 2 ) = 0 Q ( s , a 3 ) = 0 \begin{array}{l} Q(s, a_1)=0 \\ Q(s, a_2)=0 \\ Q(s, a_3)=0 \end{array} Q(s,a1)=0Q(s,a2)=0Q(s,a3)=0
但是如图 4.11 所示,假设我们在状态 s s s采取动作 a 2 a_{2} a2 ,它得到的值是正的奖励, Q ( s , a 2 ) Q(s, a_2) Q(s,a2) 就会比其他动作的Q值要大。在采取动作的时候,谁的 Q 值 最大就采取谁,所以之后永远都只会采取 a 2 a_{2} a2,其他的动作就再也不会被采取了,这就会有问题。比如我们去一个餐厅吃饭。假设我们点了某一样菜,比如椒麻鸡,我们觉得还可以。接下来我们每次去就都会点椒麻鸡,再也不点别的菜了,那我们就不知道别的菜是不是会比椒麻鸡好吃,这是一样的问题。
如果我们没有好的探索,在训练的时候就会遇到这种问题。例如, 假设我们用 深度Q网络 来玩 slither.io 网页游戏。 我们有一条蛇,它在环境里面走来走去,吃到星星,就加分。假设游戏一开始,蛇往上走,然后吃到星星,就可以得到分数,它就知道往上走可以得到奖励。接下来它就再也不会采取往上走以外的动作了,以后就会变成每次游戏一开始,它就往上走,然后游戏结束。所以需要有探索的机制,让智能体知道,虽然根据之前采样的结果, a 2 a_2 a2 好像是不错的,但我们至少偶尔也试一下 a 1 a_{1} a1 与 a 3 a_{3} a3,说不定它们更好。
这个问题就是探索-利用窘境(exploration-exploitation dilemma)问题,有两个方法可以解决这个问题: ε \pmb{\varepsilon} ε-贪心和玻尔兹曼探索(Boltzmann exploration)。
ε \varepsilon ε-贪心是指我们有 1 − ε 1-\varepsilon 1−ε 的概率会按照Q函数来决定动作,可写为
a = { arg max a Q ( s , a ) , 有 1 − ε 的概率 随机 , 否则 a= \begin{cases} \underset{a}{\arg \max} Q(s, a) & \text {, 有 } 1-\varepsilon \text { 的概率 } \\ \text { 随机} & \text {, 否则 } \end{cases} a=⎩ ⎨ ⎧aargmaxQ(s,a) 随机, 有 1−ε 的概率 , 否则
通常将 ε \varepsilon ε 设为一个很小的值, 1 − ε 1-\varepsilon 1−ε 可能是 0.9,也就是 0.9 的概率会按照Q函数来决定动作,但是我们有 0.1 的概率是随机的。通常在实现上 ε \varepsilon ε 会随着时间递减。在最开始的时候,因为不知道哪个动作是比较好的,所以我们会花比较大的力气探索。接下来,随着训练的次数越来越多,我们已经比较确定哪个动作是比较好的。我们就会减少探索,会把 ε \varepsilon ε 的值变小,主要根据Q函数来决定动作,比较少随机决定动作,这就是 ε \varepsilon ε-贪心。
还有一个方法称为玻尔兹曼探索。在玻尔兹曼探索中,我们假设对于任意的 s s s、 a a a, Q ( s , a ) ⩾ 0 Q(s,a) \geqslant 0 Q(s,a)⩾0,因此 a a a 被选中的概率与 e Q ( s , a ) / T e^{Q(s, a) / T} eQ(s,a)/T 呈正比,即
π ( a ∣ s ) = e Q ( s , a ) / T ∑ a ′ ∈ A e Q ( s , a ′ ) / T \pi(a \mid s)=\frac{\mathrm{e}^{Q(s, a) / T}}{\sum_{a^{\prime} \in A} \mathrm{e}^{Q\left(s, a^{\prime}\right) / T}} π(a∣s)=∑a′∈AeQ(s,a′)/TeQ(s,a)/T
其中, T > 0 T>0 T>0 称为温度系数。如果 T T T 很大,所有动作几乎以等概率选择(探索);如果 T T T 很小,Q值大的动作更容易被选中(利用);如果 T T T 趋于0,我们就只选择最优动作。
5 经验回放
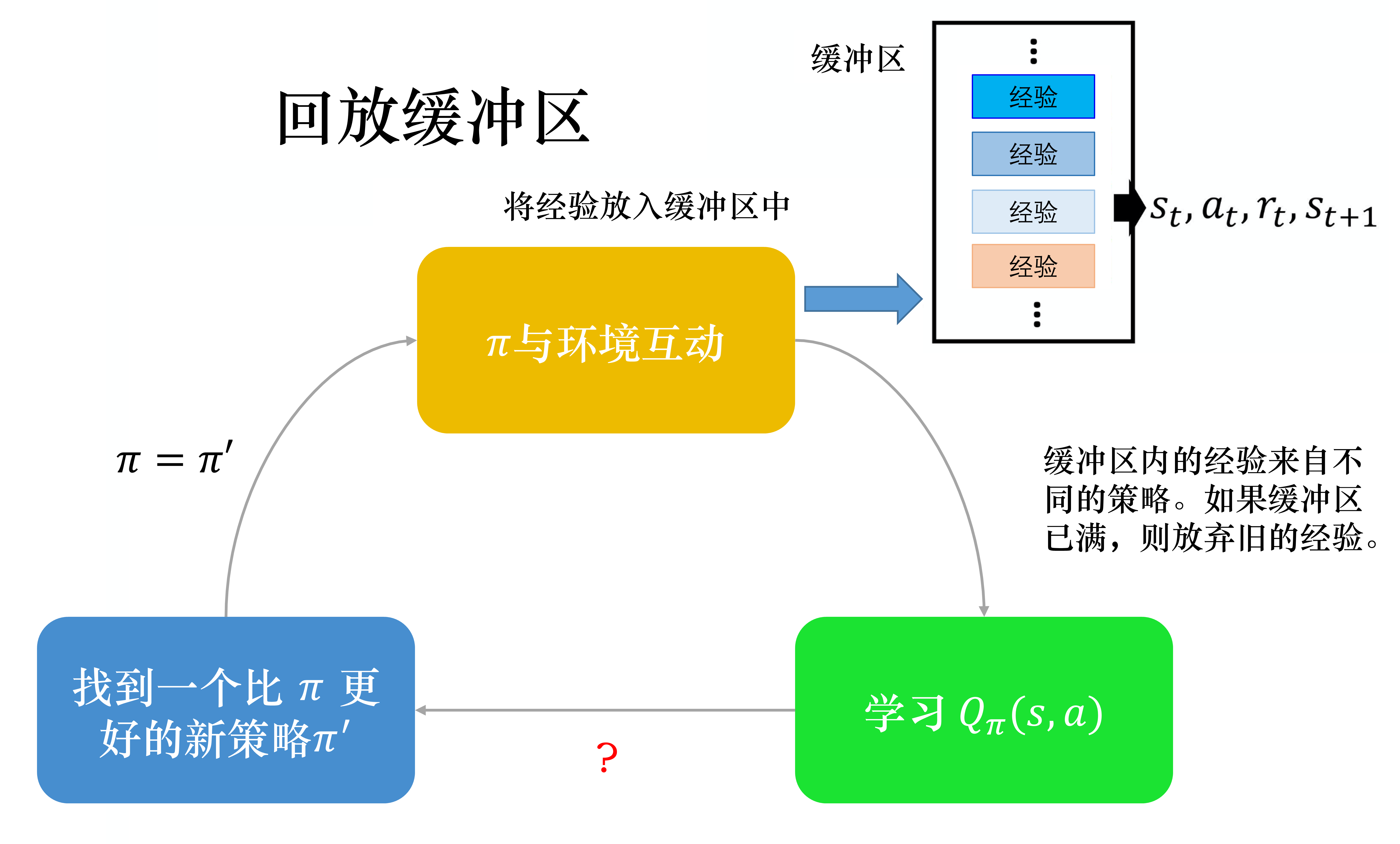
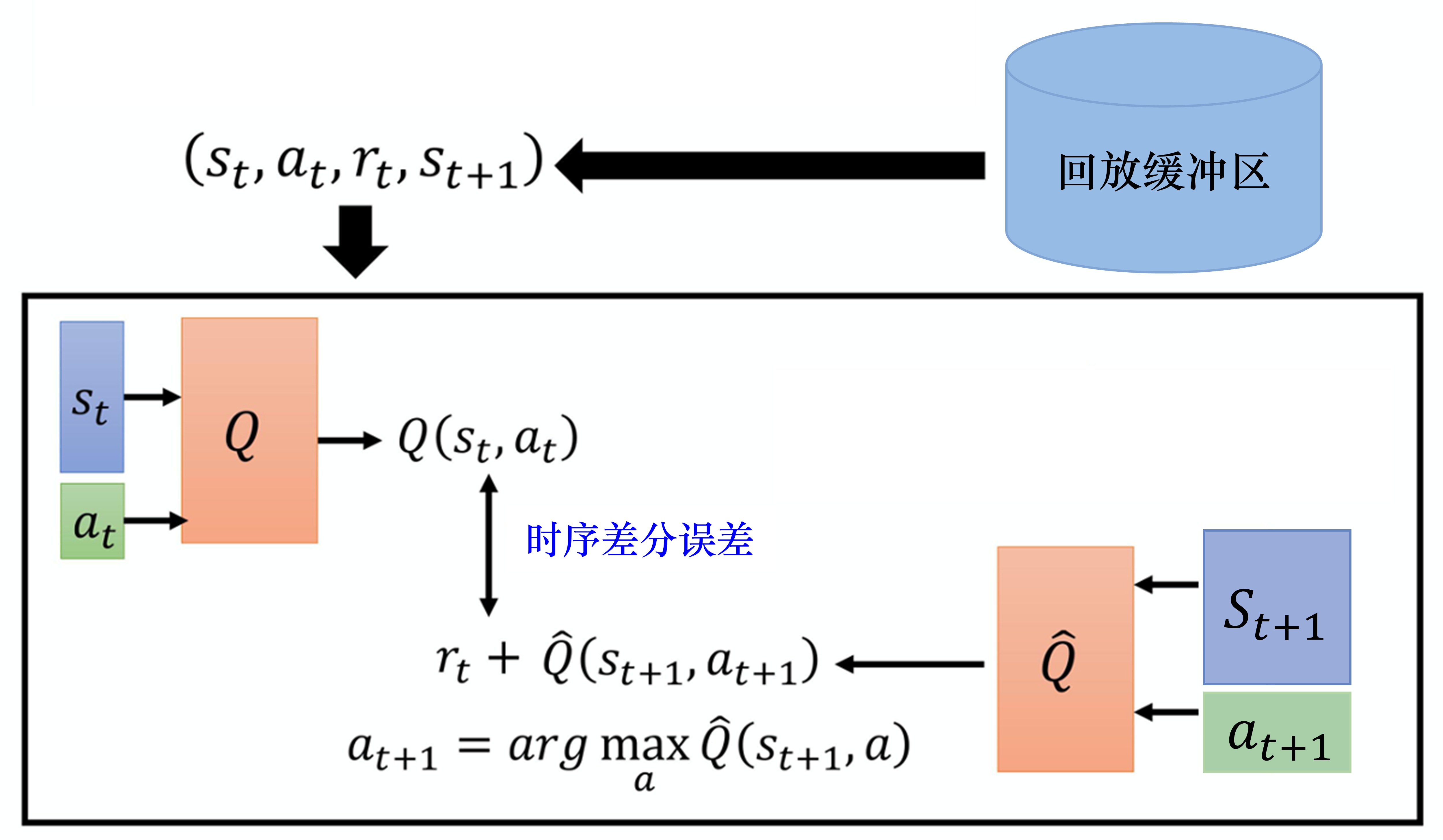
第三个技巧是经验回放(experience replay)。如图 4.12 所示,经验回放会构建一个回放缓冲区(replay buffer),回放缓冲区又被称为回放内存(replay memory)。回放缓冲区是指现在有某一个策略 π \pi π 与环境交互,它会去收集数据,我们把所有的数据放到一个数据缓冲区(buffer)里面,数据缓冲区里面存储了很多数据。比如数据缓冲区可以存储 5 万笔数据,每一笔数据就是记得说,我们之前在某一个状态 s t s_t st,采取某一个动作 a t a_t at,得到了奖励 r t r_t rt,进入状态 s t + 1 s_{t+1} st+1。我们用 π \pi π 去与环境交互多次,把收集到的数据放到回放缓冲区里面。
回放缓冲区里面的经验可能来自不同的策略,我们每次用 π \pi π 与环境交互的时候,可能只交互 10000 次,接下来我们就更新 π \pi π 了。但是回放缓冲区里面可以放 5 万笔数据,所以 5 万笔数据可能来自不同的策略。回放缓冲区只有在它装满的时候,才会把旧的数据丢掉。所以回放缓冲区里面其实装了很多不同的策略的经验。
如图 4.13 所示,有了回放缓冲区以后,我们怎么训练 Q 模型、怎么估 Q 函数呢?我们会迭代地训练 Q 函数,在每次迭代里面,从回放缓冲区中随机挑一个批量(batch)出来,即与一般的网络训练一样,从训练集里面挑一个批量出来。我们采样该批量出来,里面有一些经验,我们根据这些经验去更新Q函数。这与时序差分学习要有一个目标网络是一样的。我们采样一个批量的数据,得到一些经验,再去更新 Q 函数。
如果某个算法使用了经验回放这个技巧,该算法就变成了一个异策略的算法。因为本来 Q 是要观察 π \pi π 的经验的,但实际上存储在回放缓冲区里面的这些经验不是通通来自于 π \pi π,有些是过去其他的策略所留下来的经验。因为我们不会用某一个 π \pi π 就把整个回放缓冲区装满,拿去测Q函数, π \pi π 只是采样一些数据放到回放缓冲区里面,接下来就让 Q 去训练。所以 Q 在采样的时候, 它会采样到过去的一些数据。
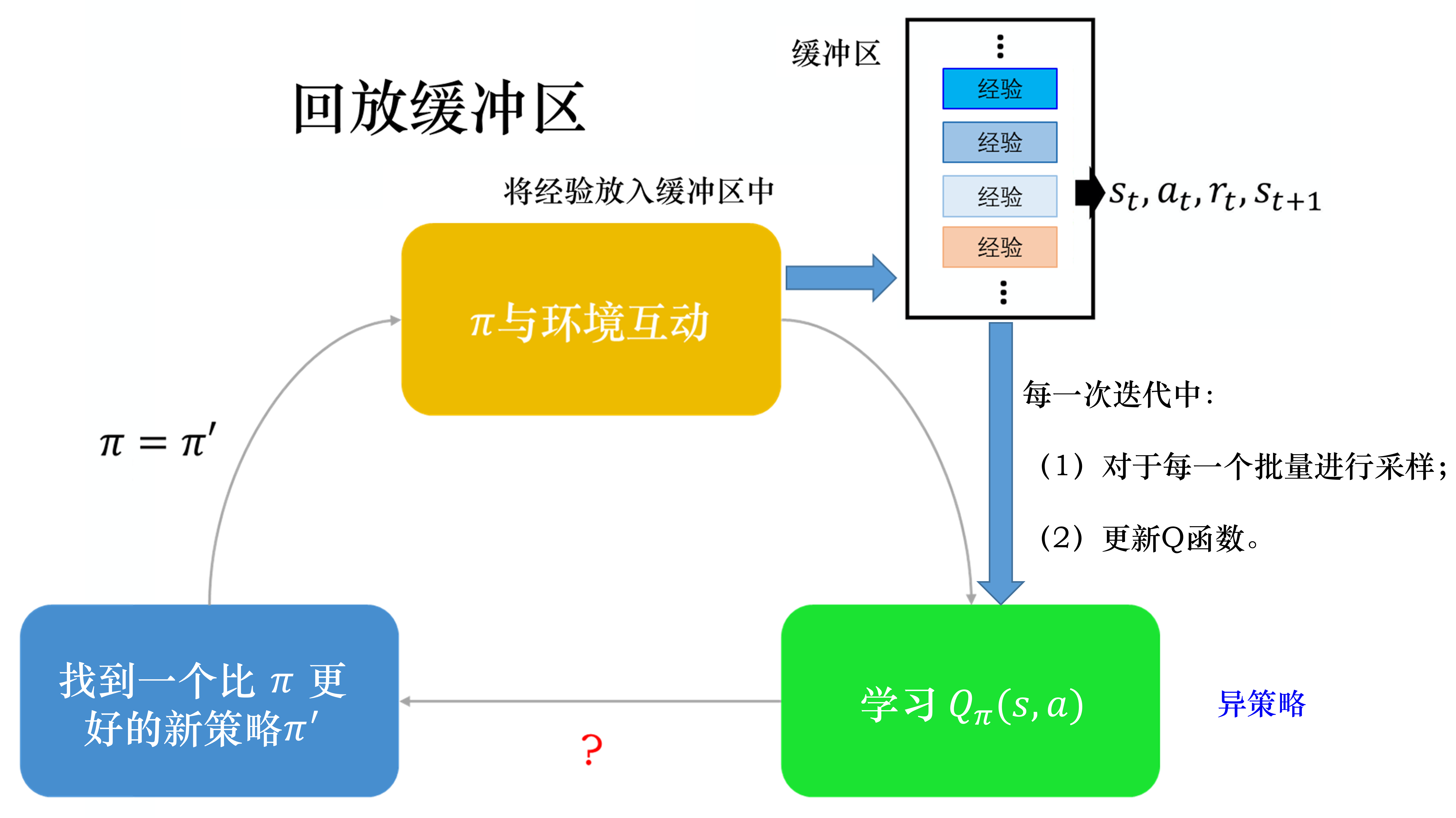
这么做有两个好处。第一个好处是,在进行强化学习的时候, 往往最花时间的步骤是与环境交互,训练网络反而是比较快的。因为我们用 GPU 训练其实很快,真正花时间的往往是与环境交互。用回放缓冲区可以减少与环境交互的次数,因为在做训练的时候,经验不需要通通来自于某一个策略。一些过去的策略所得到的经验可以放在回放缓冲区里面被使用很多次,被反复的再利用,这样可以比较高效地采样经验。第二个好处是,在训练网络的时候,其实我们希望一个批量里面的数据越多样(diverse)越好。如果批量里面的数据都是同样性质的,我们训练下去,训练结果是容易不好的。如果批量里面都是一样的数据,训练的时候,性能会比较差。我们希望批量里的数据越多样越好。如果回放缓冲区里面的经验通通来自于不同的策略,我们采样到的一个批量里面的数据会是比较多样的。
Q:我们观察 π \pi π 的值,发现里面混杂了一些不是 π \pi π 的经验,这有没有关系?
A:没关系。这并不是因为过去的策略与现在的策略很像, 就算过去的策略与现在的策略不是很像,也是没有关系的。主要的原因是我们并不是去采样一个轨迹,我们只采样了一笔经验,所以与是不是异策略这件事是没有关系的。就算是异策略,就算是这些经验不是来自于 π \pi π,我们还是可以用这些经验来估测 Q π ( s , a ) Q_{\pi}(s,a) Qπ(s,a)。
6 深度Q网络
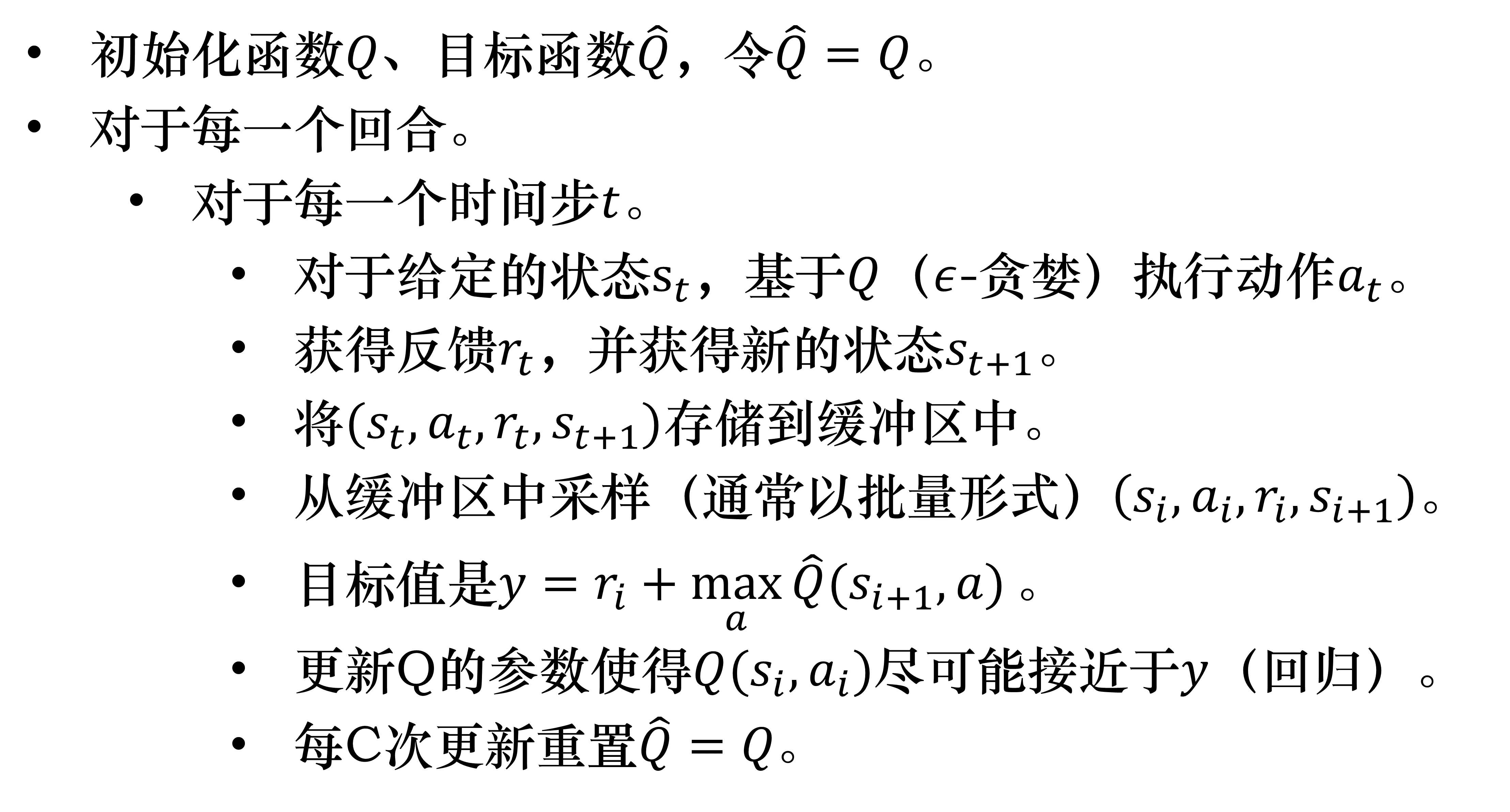
图 4.14 所示为一般的深度Q网络算法。深度Q网络 算法是这样的,我们初始化两个网络------ Q Q Q 和 Q ^ \hat{Q} Q^, Q ^ \hat{Q} Q^ 就等于 Q Q Q。一开始目标网络 Q ^ \hat{Q} Q^与原来的 Q 网络是一样的。在每一个回合中,我们用演员与环境交互,在每一次交互的过程中,都会得到一个状态 s t s_t st,会采取某一个动作 a t a_t at。
怎么知道采取哪一个动作 a t a_t at 呢?我们就根据现在的Q函数,但是要有探索的机制。比如我们用玻尔兹曼探索或是 ε \varepsilon ε-贪心探索,接下来得到奖励 r t r_t rt,进入状态 s t + 1 s_{t+1} st+1。所以现在收集到一笔数据 ( s t (s_t (st、 a t a_t at 、 r t r_t rt、 s t + 1 ) s_{t+1}) st+1),我们将其放到回放缓冲区里面。如果回放缓冲区满了, 我们就把一些旧的数据丢掉。接下来我们就从回放缓冲区里面去采样数据,采样到的是 ( s i (s_{i} (si、 a i a_{i} ai、 r i r_{i} ri、 s i + 1 ) s_{i+1}) si+1)。这笔数据与刚放进去的不一定是同一笔,我们可能抽到旧的。要注意的是,我们采样出来不是一笔数据,采样出来的是一个批量的数据,采样一些经验出来。
接下来就是计算目标。假设我们采样出一笔数据,根据这笔数据去计算目标。目标要用目标网络 Q ^ \hat{Q} Q^ 来计算。目标是:
y = r i + max a Q ^ ( s i + 1 , a ) y=r_{i}+\max _{a} \hat{Q}\left(s_{i+1}, a\right) y=ri+amaxQ^(si+1,a)
其中, a a a 是让 Q ^ \hat{Q} Q^ 值最大的动作。因为我们在状态 s i + 1 s_{i+1} si+1会采取的动作 a a a 就是可以让 Q ^ \hat{Q} Q^值最大的那一个动作。接下来我们要更新 Q 值,就把它当作一个回归问题。我们希望 Q ( s i , a i ) Q(s_i,a_i) Q(si,ai) 与目标越接近越好。假设已经更新了一定的次数,比如 C C C 次,设 C = 100 C = 100 C=100, 那我们就把 Q ^ \hat{Q} Q^ 设成 Q Q Q,这就是 深度Q网络 算法。
Q:深度Q网络 和 Q学习 有什么不同?
A:整体来说,深度Q网络与Q学习的目标价值以及价值的更新方式都非常相似。主要的不同点在于:深度Q网络 将Q学习与深度学习结合,用深度网络来近似动作价值函数,而 Q学习 则是采用表格存储;深度Q网络采用了经验回放的训练方法,从历史数据中随机采样,而Q学习直接采用下一个状态的数据进行学习。
7 深度Q网络进阶技巧
7.1 双深度Q网络
接下来我们介绍训练深度Q网络的一些技巧。第一个技巧是双深度Q网络(double DQN,DDQN)。为什么要有DDQN呢?因为在实现上,Q 值往往是被高估的。如图 4.15 所示,这里有 4 个不同的小游戏,横轴代表迭代轮次,红色锯齿状的一直在变的线表示Q函数对不同的状态估计的平均 Q 值,有很多不同的状态,每个状态我们都进行采样,算出它们的 Q 值,然后进行平均。这条红色锯齿状的线在训练的过程中会改变,但它是不断上升的。因为Q函数是取决于策略的,在学习的过程中策略越来越强,我们得到的 Q 值会越来越大。在同一个状态, 我们得到奖励的期望会越来越大,所以一般而言,Q值都是上升的,但这是深度Q网络预估出来的值。接下来我们就用策略去玩游戏,玩很多次,比如100万次,然后计算在某一个状态下,我们得到的 Q 值是多少。我们会得到在某一个状态采取某一个动作的累积奖励是多少。预估出来的值远比真实值大,且大很多,在每一个游戏中都是这样。所以DDQN的方法可以让预估值与真实值比较接近。
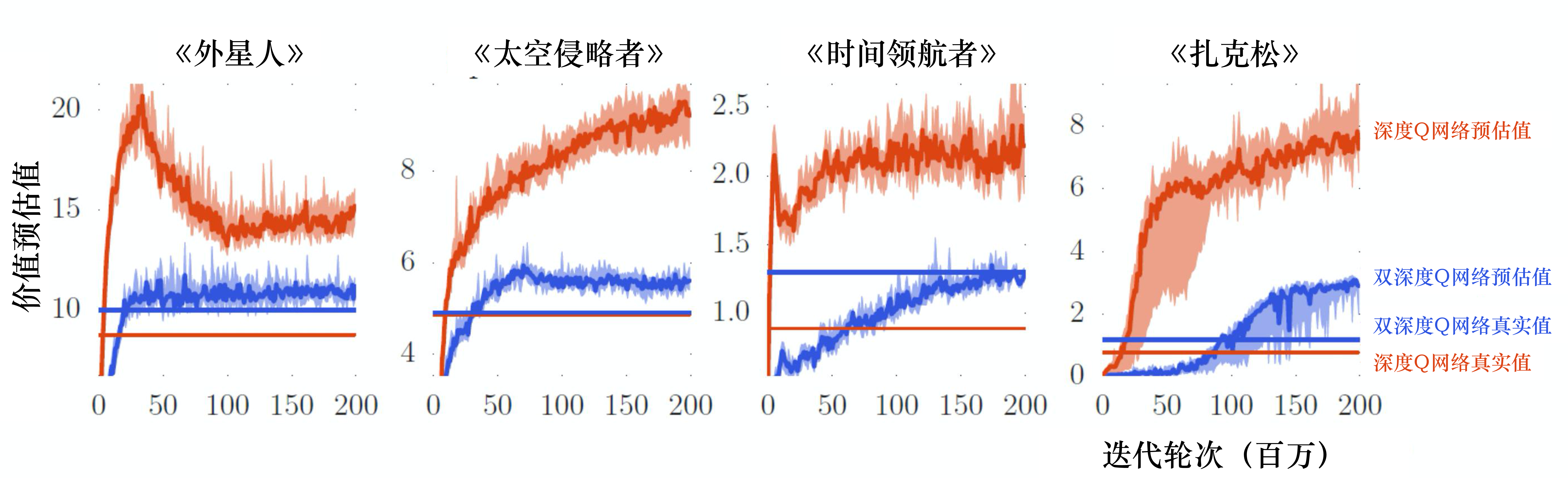
图 4.15 中蓝色的锯齿状的线是 DDQN 的Q网络所估测出来的 Q 值,蓝色的无锯齿状的线是真正的 Q 值,它们是比较接近的。我们不用管用网络估测的值,它比较没有参考价值。我们用DDQN得出的真正的Q值在图 4.15 的3 种情况下都是比原来的深度Q网络高的,代表DDQN学习出来的策略比较强,所以实际上得到的奖励是比较大的。虽然一般的 深度Q网络 的 Q网络高估了自己会得到的奖励,但实际上它得到的奖励是比较低的。
Q: 为什么 Q 值总是被高估了?
A:因为实际在训练的时候,如式(4.6)所示,我们要让左式与右式(目标)越接近越好。但目标的值很容易被设得太高,因为在计算目标的时候,我们实际上在做的,是看哪一个 a a a 可以得到最大的 Q 值,就把它加上去变成目标。
Q ( s t , a t ) ⟷ r t + max a Q ( s t + 1 , a ) (4.6) Q\left(s_{t}, a_{t}\right) \longleftrightarrow r_{t}+\max _{a} Q\left(s_{t+1}, a\right) \tag{4.6} Q(st,at)⟷rt+amaxQ(st+1,a)(4.6)
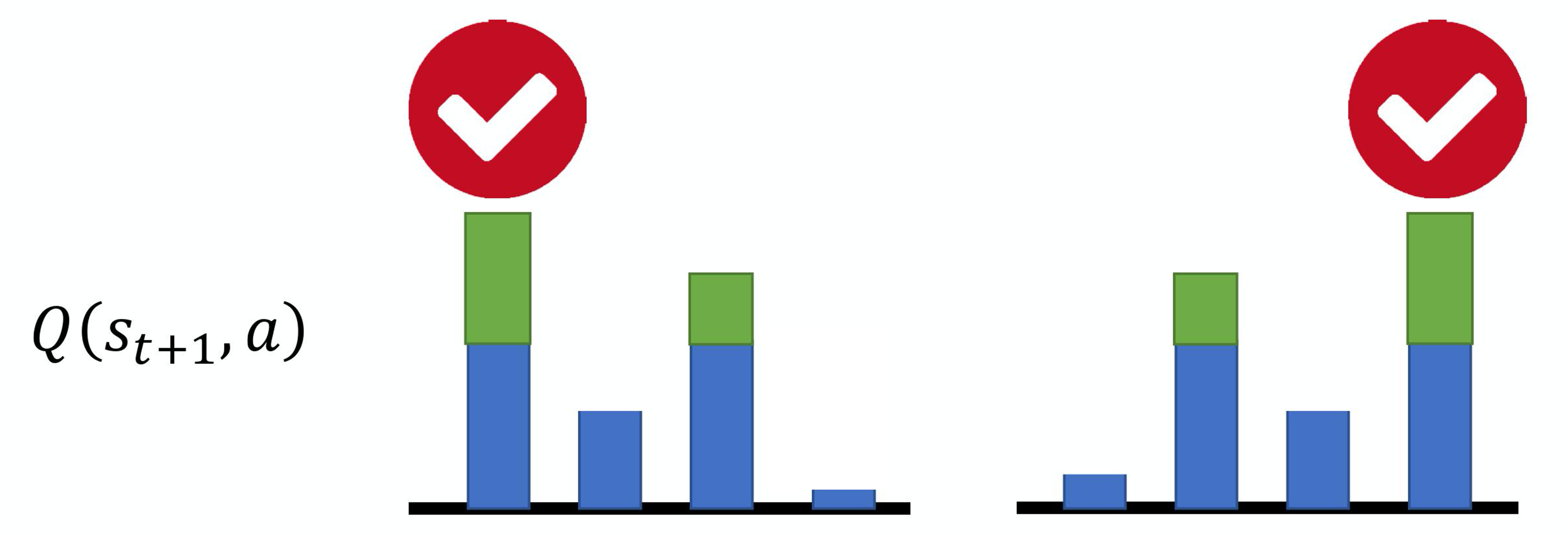
例如,假设我们现在有 4 个动作,本来它们得到的Q值都是差不多的,它们得到的奖励也是差不多的。但是在估计的时候,网络是有误差的。如图 4.16(a)所示,假设是第一个动作被高估了,绿色代表是被高估的量,智能体就会选这个动作,就会选这个高估的 Q 值来加上 r t r_t rt 来当作目标。如图 4.16(b)所示,如果第四个动作被高估了,智能体就会选第四个动作来加上 r t r_t rt 当作目标。所以智能体总是会选那个 Q 值被高估的动作,总是会选奖励被高估的动作的Q值当作最大的结果去加上 r t r_t rt 当作目标,所以目标值总是太大。
Q: 怎么解决目标值总是太大的问题呢?
A: 在DDQN里面,选动作的Q函数与计算值的Q函数不是同一个。在原来的 深度Q网络 里面,我们穷举所有的 a a a,把每一个 a a a 都代入Q函数,看哪一个 a a a 可以得到的 Q 值最高,就把那个 Q 值加上 r t r_t rt。但是在 DDQN 里面有两个 Q网络,第一个 Q网络 Q 决定哪一个动作的 Q 值最大(我们把所有的 a a a 代入 Q 函数中,看看哪一个 a a a 的Q 值最大)。我们决定动作以后,Q 值是用 Q ′ Q' Q′ 算出来的。
如式(4.7)所示,假设我们有两个Q函数———— Q Q Q 和 Q ′ Q' Q′,如果 Q Q Q 高估了它选出来的动作 a a a,只要 Q ′ Q' Q′ 没有高估动作 a a a 的值,算出来的就还是正常的值。假设 Q ′ Q' Q′ 高估了某一个动作的值,也是没问题的,因为只要 Q Q Q 不选这个动作就可以,这就是DDQN神奇的地方。
Q ( s t , a t ) ⟷ r t + Q ′ ( s t + 1 , arg max a Q ( s t + 1 , a ) ) (4.7) Q\left(s_{t}, a_{t}\right) \longleftrightarrow r_{t}+Q^{\prime}\left(s_{t+1}, \arg \max _{a} Q\left(s_{t+1}, a\right)\right) \tag{4.7} Q(st,at)⟷rt+Q′(st+1,argamaxQ(st+1,a))(4.7)
我们动手实现的时候,有两个Q网络:会更新的Q网络和目标Q网络。所以在DDQN里面,我们会用会更新参数的Q网络去选动作,用目标Q网络(固定住的网络)计算值。
DDQN相较于原来的深度Q网络的更改是最少的,它几乎没有增加任何的运算量,也不需要新的网络,因为原来就有两个网络。我们只需要做一件事:本来是用目标网络 Q ′ Q' Q′ 来找使 Q 值最大的 a a a,现在改成用另外一个会更新的Q网络来找使 Q 值最大的 a a a。如果只选一个技巧,我们一般都会选DDQN,因为其很容易实现。
7.2 竞争深度Q网络
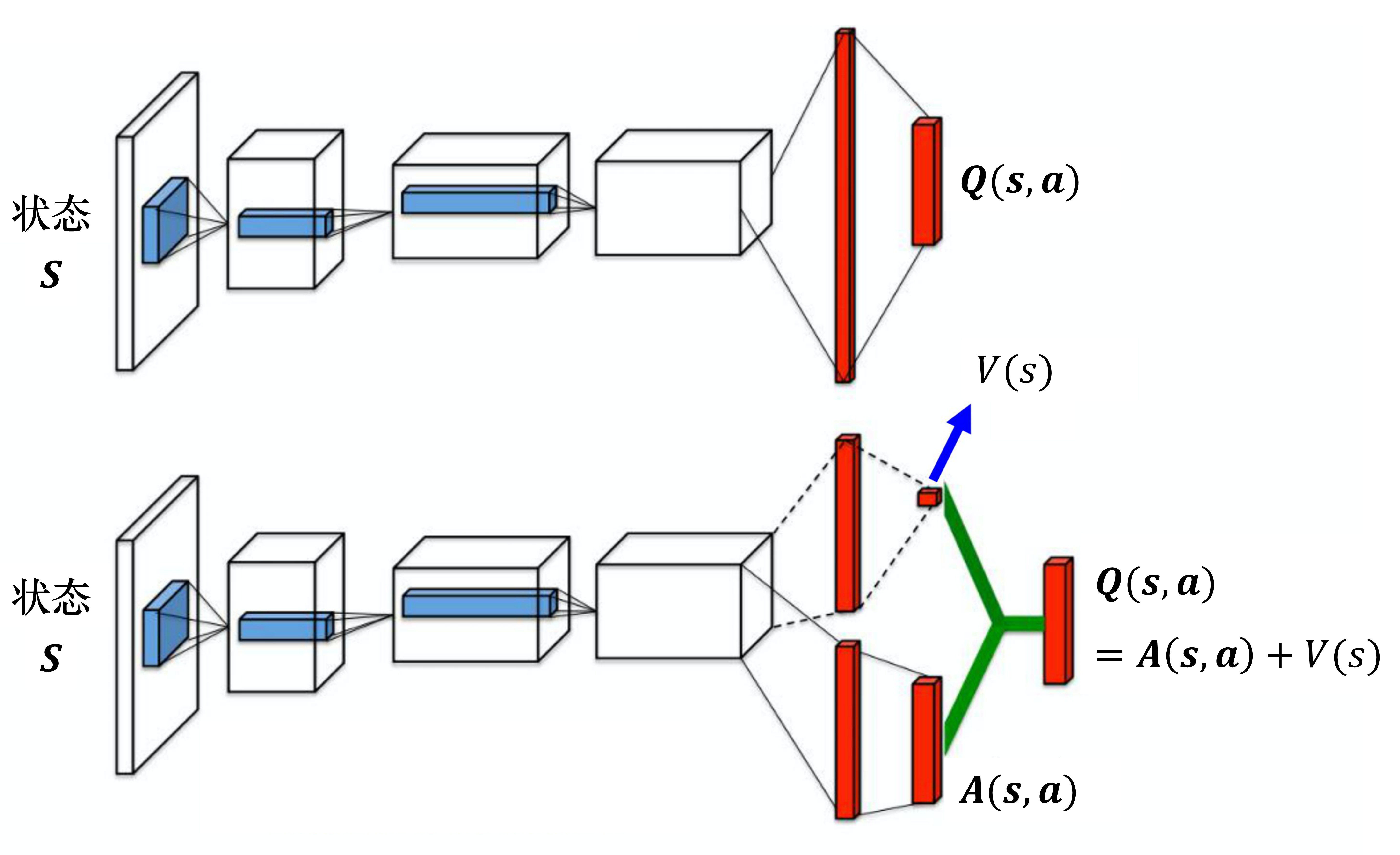
第二个技巧是竞争深度Q网络(dueling DQN),相较于原来的 深度Q网络,它唯一的差别是改变了网络的架构。Q网络输入状态,输出的是每一个动作的 Q 值。如图 4.17 所示,原来的深度Q网络直接输出 Q 值,竞争深度Q网络不直接输出 Q 值,而是分成两条路径运算。第一条路径会输出一个标量 V ( s ) V(\boldsymbol{s}) V(s),因为它与输入 s \boldsymbol{s} s 是有关系的,所以称为 V ( s ) V(\boldsymbol{s}) V(s)。第二条路径会输出一个向量 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a),它的每一个动作都有一个值。我们再把 V ( s ) V(\boldsymbol{s}) V(s) 和 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 加起来就可以得到 Q 值 Q ( s , a ) \boldsymbol{Q}(\boldsymbol{s},\boldsymbol{a}) Q(s,a)。
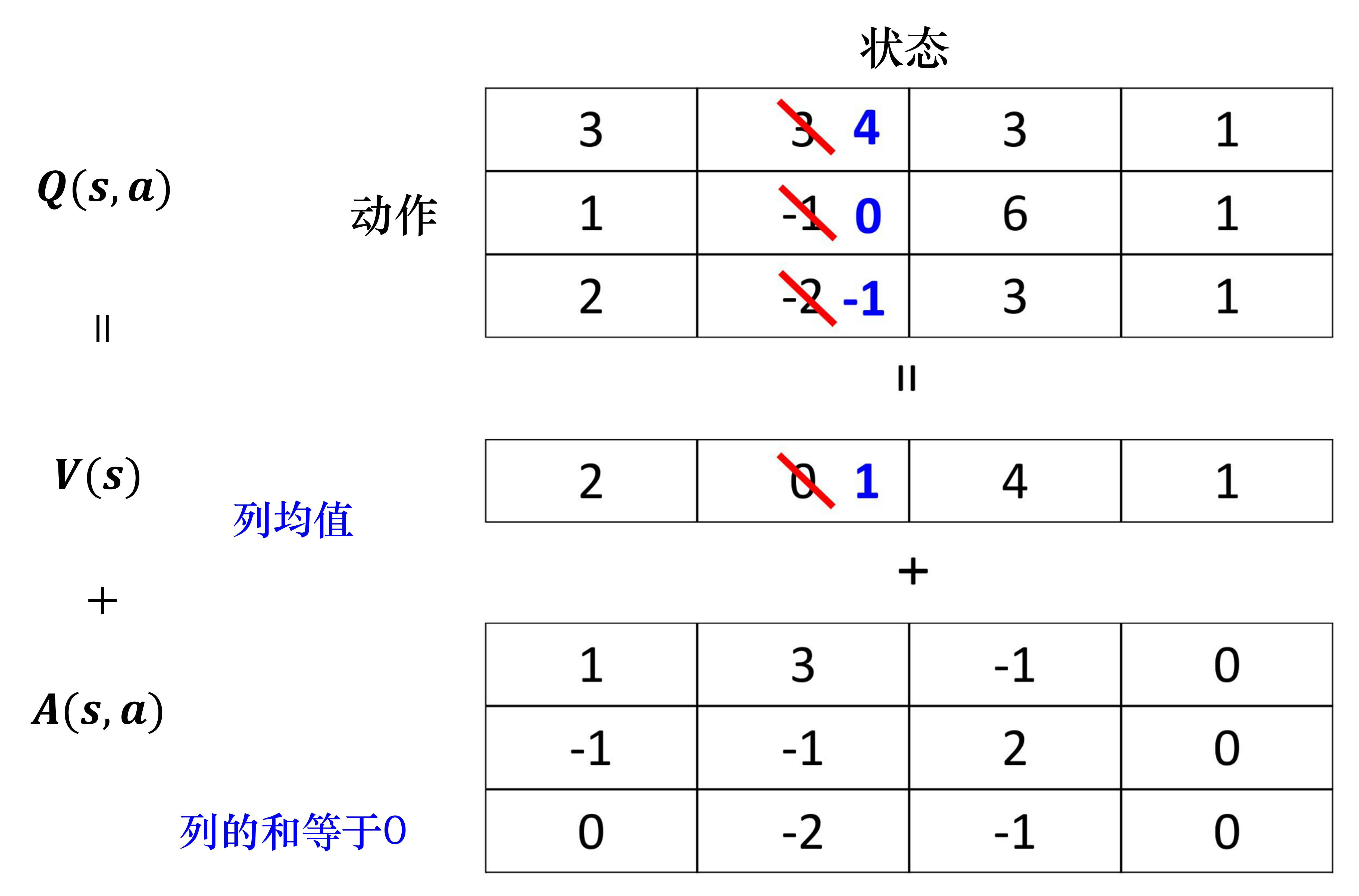
我们假设状态是离散的(实际上状态不是离散的),为了说明方便,我们假设就只有 4 个不同的状态,只有 3 个不同的动作,所以 Q ( s , a ) \boldsymbol{Q}(\boldsymbol{s},\boldsymbol{a}) Q(s,a) 可以看成一个表格,如图 4.18 所示。
我们知道
Q ( s , a ) = V ( s ) + A ( s , a ) \boldsymbol{Q}(\boldsymbol{s},\boldsymbol{a}) = V(\boldsymbol{s}) + \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) Q(s,a)=V(s)+A(s,a)
其中, V ( s ) V(\boldsymbol{s}) V(s) 对不同的状态,都有一个值。 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 对不同的状态、不同的动作都有一个值。我们把 V ( s ) V(\boldsymbol{s}) V(s) 的每一列的值加到 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)的每一列就可以得到 Q 值,以第一列为例,有 2+1、2+(-1)、2+0,可以得到 3、1、2,以此类推。
如图 4.18 所示,假设我们在训练网络的时候,目标是希望Q表格中第一行第二列的值变成 4,第二行第二列的值变成 0。但是我们实际上能修改的并不是 Q 值,能修改的是 V ( s ) V(\boldsymbol{s}) V(s) 与 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)的值。根据网络的参数, V ( s ) V(\boldsymbol{s}) V(s) 与 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)的值输出以后,就直接把它们加起来,所以其实不是修改 Q 值。在学习网络的时候,假设我们希望 Q 表格中的 3 增加 1 变成 4、-1 增加 1 变成 0。最后我们在训练网络的时候,我们可能就不用修改 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)的值,就修改 V ( s ) V(\boldsymbol{s}) V(s) 的值,把 V ( s ) V(\boldsymbol{s}) V(s) 的值从 0 变成 1。从 0 变成 1 有什么好处呢?本来只想修改两个值,但 Q表格中的第三个值也被修改了:-2 变成了 -1。所以有可能我们在某一个状态下,只采样到这两个动作,没采样到第三个动作,但也可以更改第三个动作的 Q 值。这样的好处就是我们不需要把所有的状态-动作对都采样,可以用比较高效的方式去估计 Q 值。因为有时候我们更新的时候,不一定是更新Q表格,而是只更新了 V ( s ) V(\boldsymbol{s}) V(s),但更新 V ( s ) V(\boldsymbol{s}) V(s) 的时候,只要修改 V ( s ) V(\boldsymbol{s}) V(s)的值,Q表格的值也会被修改。竞争深度Q网络是一个使用数据比较有效率的方法。
可能会有人认为使用竞争深度Q网络会有一个问题,竞争深度Q网络最后学习的结果可能是这样的:智能体就学到 V ( s ) V(\boldsymbol{s}) V(s) 等于 0, A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 等于 Q,使用任何竞争深度Q网络就没有任何好处,就和原来的深度Q网络一样。
为了避免这个问题出现,实际上我们要给 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 一些约束,让 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)的更新比较麻烦,让网络倾向于使用 V ( s ) V(\boldsymbol{s}) V(s)来解决问题。
例如,我们有不同的约束,一个最直觉的约束是必须要让 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 的每一列的和都是 0,所以看我这边举的例子,列的和都是 0。如果这边列的和都是 0,我们就可以把 V ( s ) V(\boldsymbol{s}) V(s)的值想成是上面 Q 的每一列的平均值。这个平均值,加上 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)的值才会变成是 Q 的值。所以假设在更新参数的时候,要让整个列一起被更新,更新 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 的某一列比较麻烦,所以我们就不会想要更新 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 的某一列。因为 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a) 的每一列的和都要是 0,所以我们无法让 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)的某列的值都加1,这是做不到的,因为它的约束就是和永远都是 0,所以不可以都加1,这时候就会强迫网络去更新 V ( s ) V(\boldsymbol{s}) V(s)的值,让我们可以用比较有效率的方法去使用数据。
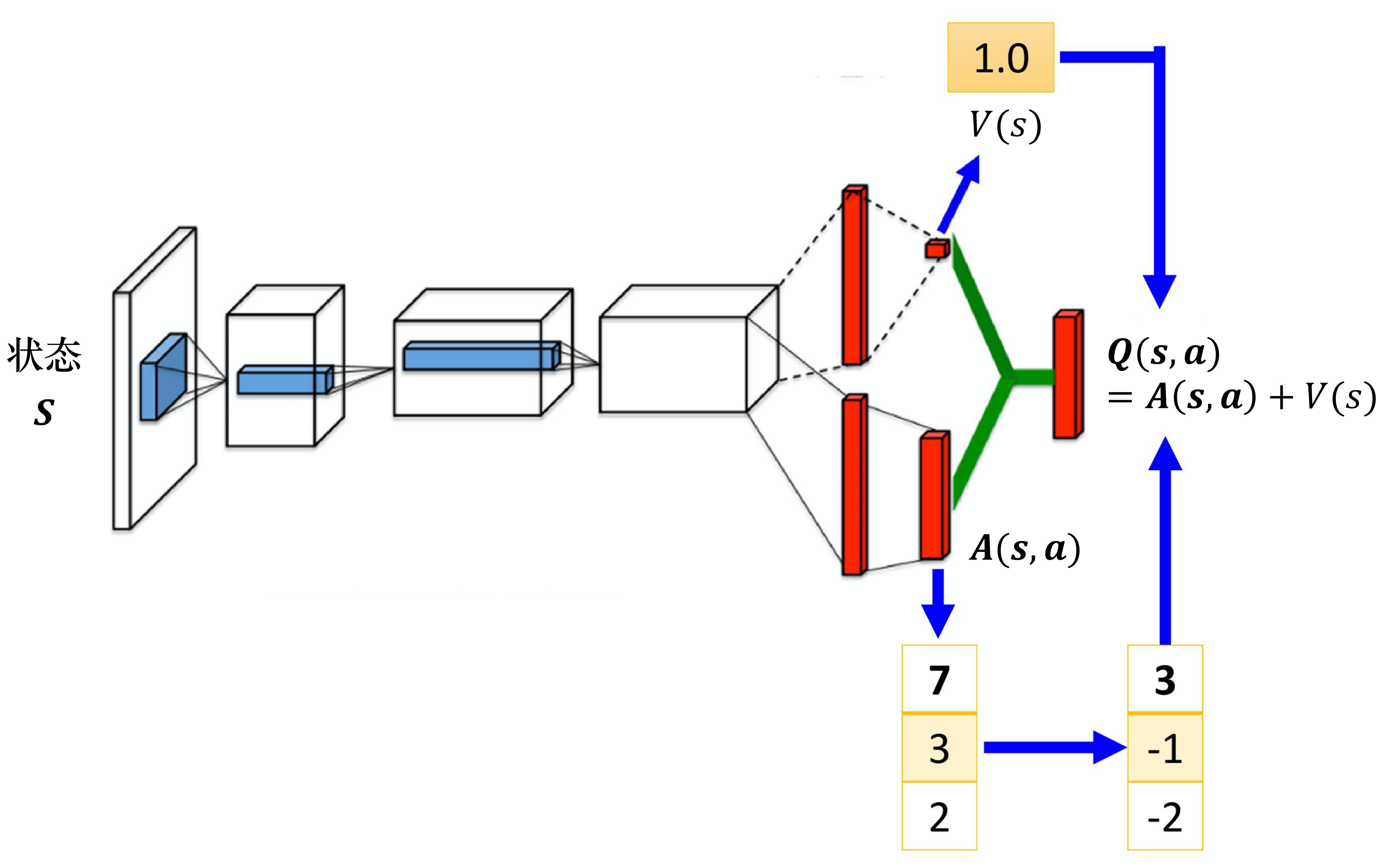
实现时,我们要给这个 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)一个约束。例如,如图 4.19 所示,假设有 3 个动作,输出的向量是 [ 7 , 3 , 2 ] T [7,3,2]^{\mathrm{T}} [7,3,2]T,我们在把 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)与 V ( s ) V(\boldsymbol{s}) V(s) 加起来之前,先进行归一化(normalization)。
归一化的过程如下:
(1)计算均值(7+3+2)/3=4;
(2)向量 [ 7 , 3 , 2 ] T [7,3,2]^{\mathrm{T}} [7,3,2]T的每个元素的值都减去均值4,于是归一化的向量为 [ 3 , − 1 , 2 ] T [3,-1,2]^{\mathrm{T}} [3,−1,2]T。
接着我们将向量 [ 3 , − 1 , 2 ] T [3,-1,2]^{\mathrm{T}} [3,−1,2]T中的每个元素的值加上 1,就可以得到最后的 Q 值。这个归一化的步骤就是网络的其中一部分,在训练的时候,我们也使用反向传播,只是归一化是没有参数的,它只是一个操作,可以把它放到网络里面,与网络的其他部分共同训练,这样 A ( s , a ) \boldsymbol{A}(\boldsymbol{s},\boldsymbol{a}) A(s,a)就会有比较大的约束,网络就会给它一些好处,让它倾向于去更新 V ( s ) V(\boldsymbol{s}) V(s)的值,这就是竞争深度Q网络。
7.3 优先级经验回放
第三个技巧称为优先级经验回放(prioritized experience replay,PER)。如图 4.20 所示,我们原来在采样数据训练 Q 网络的时候,会均匀地从回放缓冲区里面采样数据。这样不一定是最好的, 因为也许有一些数据比较重要。假设有一些数据,我们之前采样过,发现这些数据的时序差分误差特别大(时序差分误差就是网络的输出与目标之间的差距),这代表我们在训练网络的时候,这些数据是比较不好训练的。既然比较不好训练,就应该给它们比较大的概率被采样到,即给它优先权(priority)。这样在训练的时候才会多考虑那些不好训练的数据。实际上在做 PER 的时候,我们不仅会更改采样的过程,还会因为更改了采样的过程,而更改更新参数的方法。所以PER不仅改变了采样数据的分布,还改变了训练过程。
7.4 在蒙特卡洛方法和时序差分方法中取得平衡
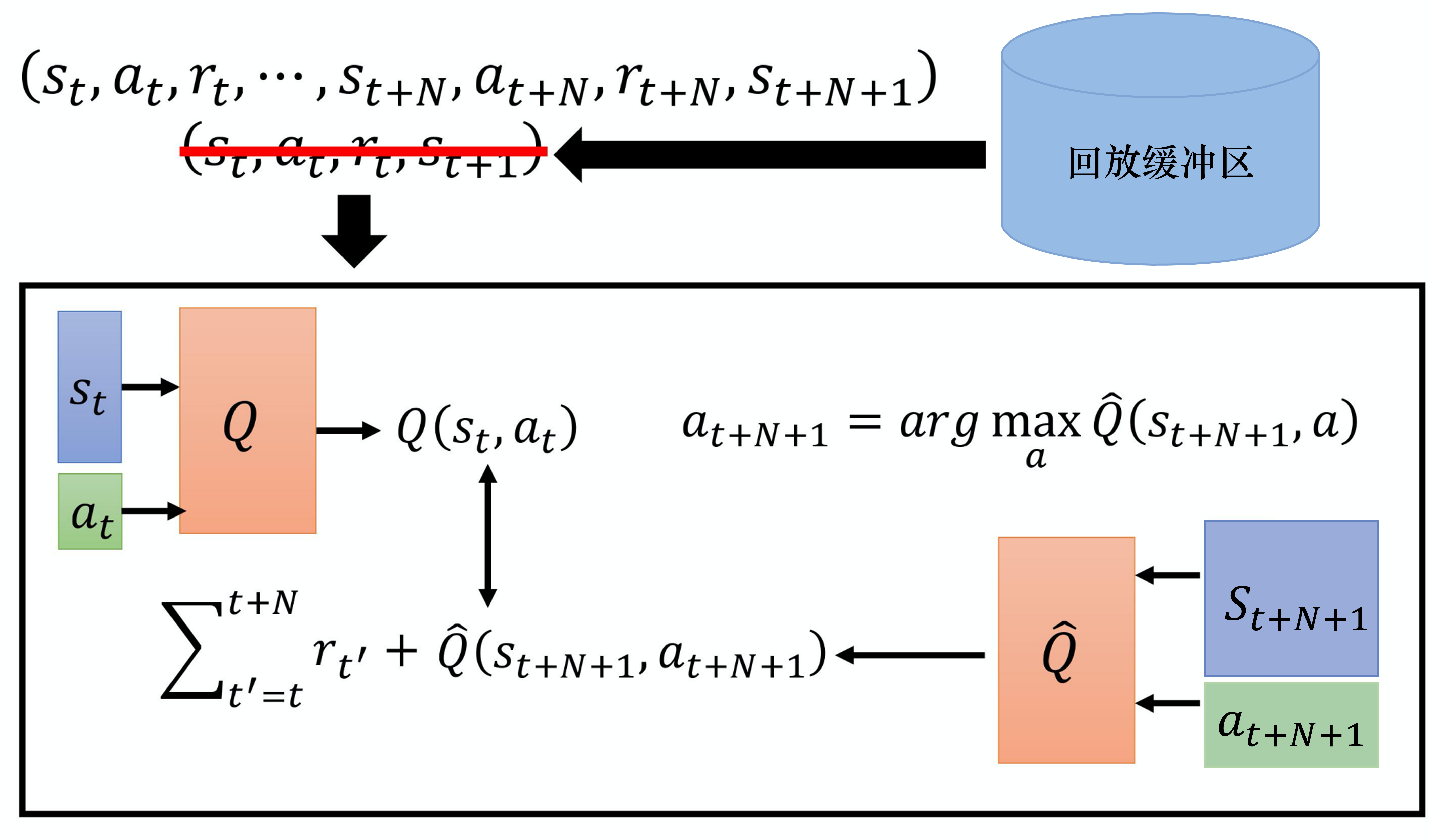
蒙特卡洛方法与时序差分方法各有优劣,因此我们可以在蒙特卡洛方法和时序差分方法中取得平衡,这个方法也被称为多步方法。我们的做法如图 4.21 所示,在时序差分方法里面,在某一个状态 s t s_t st 采取某一个动作 a t a_t at 得到奖励 r t r_t rt,接下来进入状态 s t + 1 s_{t+1} st+1。但是我们可以不只保存一个步骤的数据,可保存 N N N 个步骤的数据。
我们记录在 s t s_t st 采取 a t a_t at,得到 r t r_t rt时,会进入的 s t + 1 s_{t+1} st+1。一直记录到第 N N N 个步骤以后,在 s t + N s_{t+N} st+N采取 a t + N a_{t+N} at+N,得到 r t + N r_{t+N} rt+N,进入 s t + N + 1 s_{t+N+1} st+N+1 的这些经验,把它们保存下来。实际上在做更新的时候,在做Q网络学习的时候,我们要让 Q ( s t , a t ) Q(s_t,a_t) Q(st,at) 与目标值越接近越好。 Q ^ \hat{Q} Q^ 所计算的不是 s t + 1 s_{t+1} st+1的,而是 s t + N + 1 s_{t+N+1} st+N+1的奖励。我们会把 N N N 个步骤以后的状态 s t + N + 1 s_{t+N+1} st+N+1 输入到 Q ^ \hat{Q} Q^ 中去计算 N N N 个步骤以后会得到的奖励。如果要算目标值,要再加上多步(multi-step)的奖励 ∑ t ′ = t t + N r t ′ \sum_{t^{\prime}=t}^{t+N} r_{t^{\prime}} ∑t′=tt+Nrt′ ,多步的奖励是从时间 t t t 一直到 t + N t+N t+N 的 N + 1 N+1 N+1 个奖励的和。我们希望 Q ( s t , a t ) Q(s_t,a_t) Q(st,at) 和目标值越接近越好。
多步方法就是蒙特卡洛方法与时序差分方法的结合,因此它不仅有蒙特卡洛方法的好处与坏处,还有时序差分方法的好处与坏处。我们先看看多步方法的好处,之前只采样了某一个步骤,所以得到的数据是真实的,接下来都是 Q 值估测出来的。现在采样比较多的步骤,采样 N N N 个步骤才估测值,所以估测的部分所造成的影响就会比较小。当然多步方法的坏处就与蒙特卡洛方法的坏处一样,因为 r r r 有比较多项,所以我们把 N N N 项的 r r r 加起来,方差就会比较大。但是我们可以调整 N N N 的值,在方差与不精确的 Q 值之间取得一个平衡。 N N N 就是一个超参数,我们可以对其进行调整。
7.5 噪声网络
我们还可以改进探索。 ε \varepsilon ε-贪心这样的探索就是在动作的空间上加噪声,但是有一个更好的方法称为噪声网络(noisy net),它是在参数的空间上加噪声。噪声网络是指,每一次在一个回合开始的时候,在智能体要与环境交互的时候,智能体使用Q函数来采取动作,Q函数里面就是一个网络,我们在网络的每一个参数上加上一个高斯噪声(Gaussian noise),就把原来的Q函数变成 Q ~ \tilde{Q} Q~ 。因为我们已经用 Q ^ \hat{Q} Q^ 来表示目标网络,所以我们用 Q ~ \tilde{Q} Q~ 来表示噪声Q函数(noisy Q-function)。我们把每一个参数都加上一个高斯噪声,就得到一个新的网络 Q ~ \tilde{Q} Q~。使用噪声网络执行的动作为
a = arg max a Q ~ ( s , a ) a=\underset{a}{\arg \max} \tilde{Q}(s, a) a=aargmaxQ~(s,a)
这里要注意,在每个回合开始的时候,与环境交互之前,我们就采样噪声。接下来我们用固定的噪声网络玩游戏,直到游戏结束,才重新采样新的噪声,噪声在一个回合中是不能被改变的。OpenAI 与 DeepMind 在同时间提出了几乎一模一样的噪声网络方法,并且对应的两篇论文都发表在 ICLR 2018 会议中。不一样的地方是,他们用不同的方法加噪声。OpenAI 的方法比较简单,直接加一个高斯噪声,也就是把每一个参数、每一个权重(weight)都加一个高斯噪声。DeepMind 的方法比较复杂,该方法中的噪声是由一组参数控制的,网络可以自己决定噪声要加多大。但是两种方法的概念都是一样的,总之,我们就是对Q函数里面的网络加上一些噪声,把它变得有点儿不一样,即与原来的Q函数不一样,然后与环境交互。两篇论文里面都强调,参数虽然会被加上噪声,但在同一个回合里面参数是固定的。我们在换回合、玩另一场新的游戏的时候,才会重新采样噪声。在同一场游戏里面就是同一个噪声Q网络在玩该场游戏,这非常重要。因为这导致了噪声网络与原来的 ε \varepsilon ε-贪心或其他在动作上做采样的方法的本质上的差异。
有什么本质上的差异呢?在原来采样的方法中,比如 ε \varepsilon ε-贪心中,就算给定同样的状态,智能体采取的动作也不一定是一样的。因为智能体通过采样来决定动作,给定同一个状态,智能体根据Q函数的网络来输出一个动作,或者采样到随机来输出一个动作。所以给定相同的状态,如果是用 ε \varepsilon ε-贪心的方法,智能体可能会执行不同的动作。但实际上策略并不是这样的,一个真实世界的策略,给定同样的状态,它应该有同样的回应。而不是给定同样的状态,它有时候执行Q函数,有时候又是随机的,这是一个不正常的动作,是在真实的情况下不会出现的动作。但是如果我们是在Q函数的网络的参数上加噪声, 就不会出现这种情况。因为如果在Q函数的网络的参数上加噪声,在整个交互的过程中,在同一个回合里面,它的网络的参数总是固定的,所以看到相同或类似的状态,就会采取相同的动作,这是比较正常的。这被称为依赖状态的探索(state-dependent exploration),我们虽然会做探索这件事,但是探索是与状态有关系的,看到同样的状态,就会采取同样的探索的方式,而噪声(noisy)的动作只是随机乱试。但如果我们是在参数下加噪声,在同一个回合里面,参数是固定的,我们就是系统地尝试。比如,我们每次在某一个状态,都向左试试看。在下一次在玩同样游戏的时候,看到同样的状态,我再向右试试看,是系统地在探索环境。
7.6 分布式Q函数
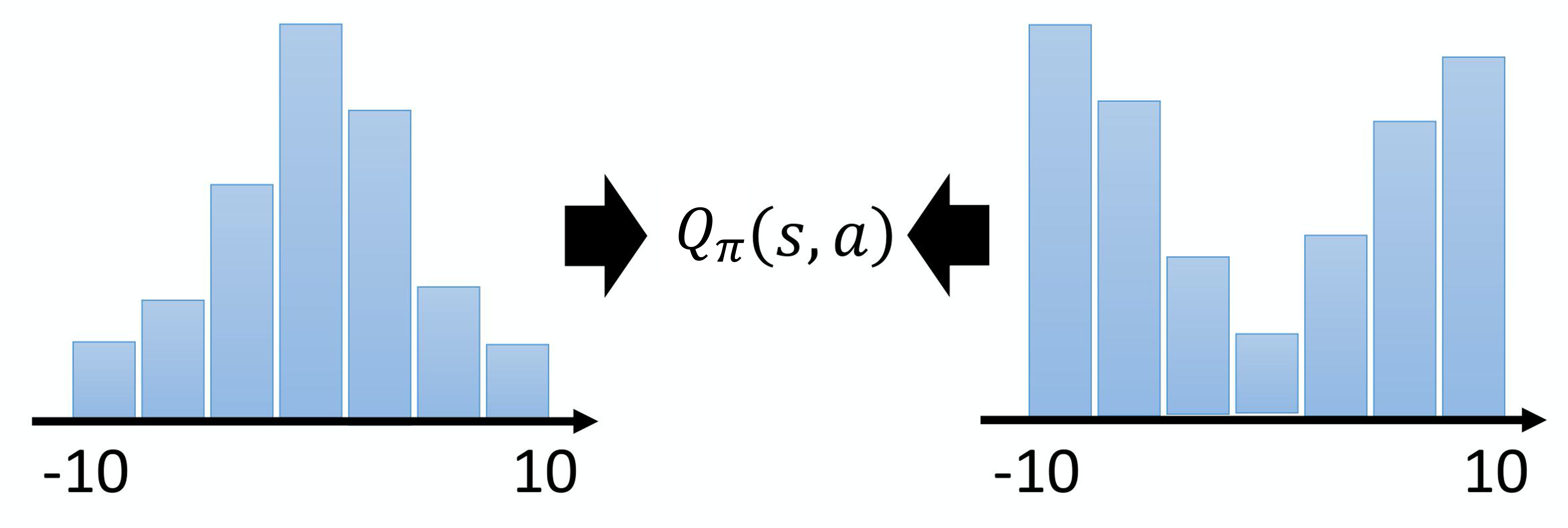
还有一个技巧称为分布式Q函数(distributional Q-function)。分布式Q函数是比较合理的,但是它难以实现。Q函数是累积奖励的期望值,所以我们算出来的 Q 值其实是一个期望值。如图 4.22 所示,因为环境是有随机性的,所以在某一个状态采取某一个动作的时候,我们把所有的奖励在游戏结束的时候进行统计,得到的是一个分布。也许在奖励得到 0 的概率很高,得到 -10 的概率比较低,得到 +10 的概率也比较低,但是它是一个分布。(我们对这个分布计算它的平均值才是这个 Q 值,算出来是累积奖励的期望。所以累积奖励是一个分布,对它取期望,对它取平均值,得到 Q 值)。但不同的分布可以有同样的平均值。也许真正的分布是图 4.22 所示右边的分布,它的平均值与左边的分布的平均值其实是一样的,但它们背后所代表的分布其实是不一样的。假设我们只用 Q 值的期望来代表整个奖励,可能会丢失一些信息,无法对奖励的分布进行建模。
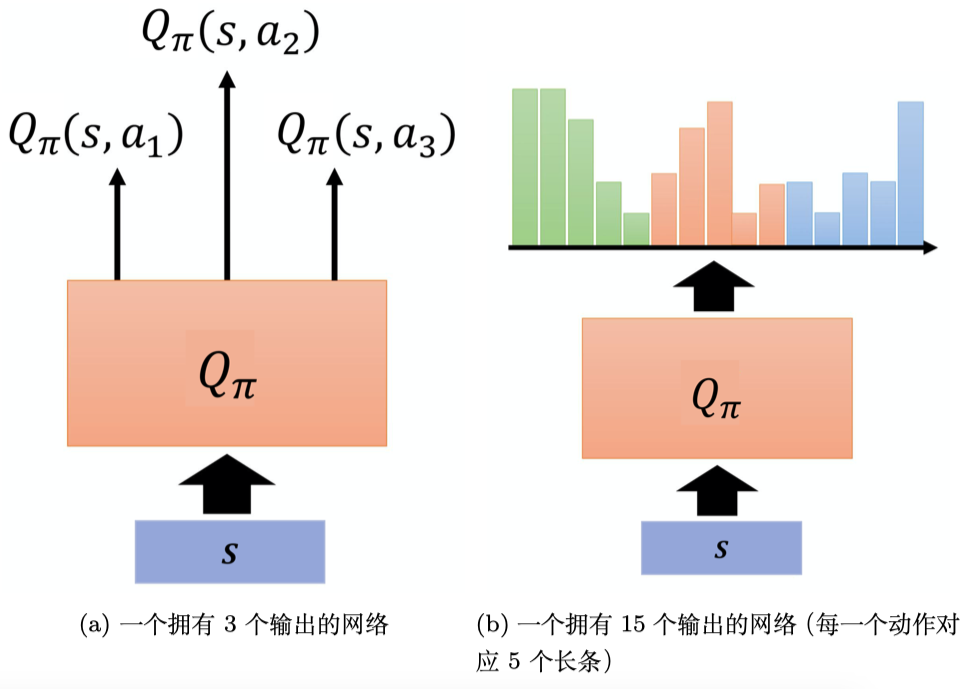
分布式Q函数是对分布(distribution)建模,怎么做呢?如图 4.23a 所示,在原来的Q函数里面,假设我们只能采取 a 1 a_1 a1、 a 2 a_2 a2、 a 3 a_3 a3 这3 个动作,我们输入一个状态,输出 3 个值。这3 个值分别代表 3 个动作的 Q 值,但是这些 Q 值是一个分布的期望值。所以分布式Q函数就是直接输出分布。实际上的做法如图 4.23b 所示,假设分布的值就分布在某一个范围里面,比如 -10 ~ 10,把 -10 ~ 10 拆成一个一个的长条。例如,每一个动作的奖励空间拆成 5 个长条。假设奖励空间可以拆成 5 个长条,Q函数的输出就是要预测我们在某一个状态采取某一个动作得到的奖励,其落在某一个长条里面的概率。所以绿色长条概率的和应该是 1,其高度代表在某一个状态采取某一个动作的时候,它落在某一个长条内的概率。绿色的代表动作 a 1 a_1 a1,红色的代表动作 a 2 a_2 a2,蓝色的代表动作 a 3 a_3 a3。所以我们就可以用Q函数去估计 a 1 a_1 a1 的分布、 a 2 a_2 a2 的分布、 a 3 a_3 a3 的分布。实际上在做测试的时候,我们选平均值最大的动作执行。
除了选平均值最大的动作以外,我们还可以对分布建模。例如,我们可以考虑动作的分布,如果分布方差很大,这代表采取这个动作虽然平均而言很不错,但也许风险很高,我们可以训练一个网络来规避风险。在两个动作平均值都差不多的情况下,也许可以选一个风险比较小的动作来执行,这就是分布式Q函数的好处。
7.7 彩虹(rainbow)
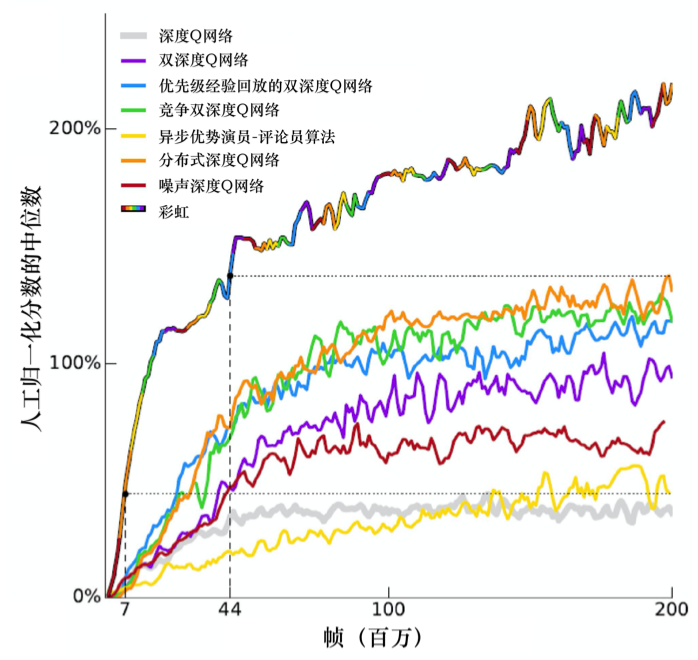
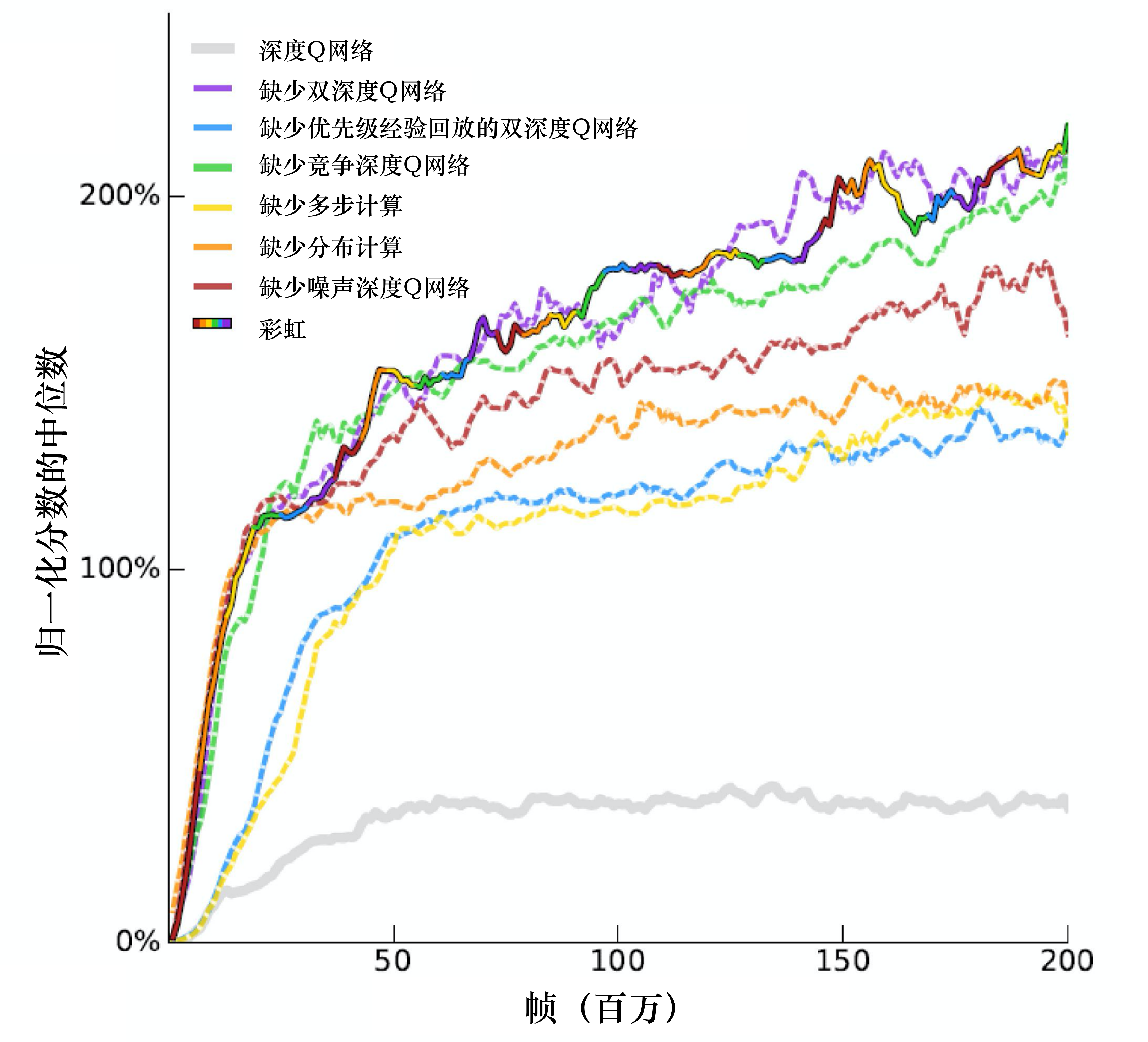
最后一个技巧称为彩虹(rainbow),如图 4.24 所示,假设每个方法有一种自己的颜色(如果每一个单一颜色的线代表只用某一个方法),把所有的颜色组合起来,就变成“彩虹”,我们把原来的深度Q网络也算作一种方法,故有 7 种颜色。横轴代表训练过程的帧数,纵轴代表玩十几个雅达利小游戏的平均分数的和,但它取的是分数的中位数。为什么是取中位数而不是直接取平均呢?因为不同小游戏的分数差距很大,如果取平均,某几个游戏可能会控制结果,因此我们取中位数。如果我们使用的是一般的深度Q网络(灰色的线),深度Q网络的性能不是很好。噪声深度Q网络(noisy DQN)比DQN的性能好很多。紫色的线代表 DDQN,DDQN 还挺有效的。优先级经验回放的双深度Q网络(prioritized DDQN)、竞争双深度Q网络(dueling DDQN)和分布式深度Q网络(distributional DQN)性能也挺高的。**异步优势演员-评论员(asynchronous advantage actor-critic,A3C)**是演员-评论员的方法,A3C算法又被译作异步优势动作评价算法,我们会在第九章详细介绍异步优势演员-评论员算法。单纯的异步优势演员-评论员算法看起来是比深度Q网络强的。图 4.24 中没有多步方法,这是因为异步优势演员-评论员算法本身内部就有多步方法,所以实现异步优势演员-评论员算法就等同于实现多步方法,我们可以把 异步优势演员-评论员算法的结果看成多步方法的结果。这些方法本身之间是没有冲突的,我们把全部方法都用上就变成了七彩的方法,即彩虹方法,彩虹方法的性能很好。
我们把所有的方法加在一起,模型的表现会提高很多,但会不会有些方法其实是没有用的呢?我们可以去掉其中一种方法来判断这个方法是否有用。如图 4.25 所示,虚线就是彩虹方法去掉某一种方法以后的结果,黄色的虚线去掉多步方法后“掉”很多。彩虹是彩色的实线,去掉多步方法会“掉下来”,去掉优先级经验回放后会“掉下来”,去掉分布也会“掉下来”。
这边有一个有趣的地方,在开始的时候,分布训练的方法与其他方法速度差不多。但是我们去掉分布训练方法的时候,训练不会变慢,但是性能(performance)最后会收敛在比较差的地方。我们去掉噪声网络后性能也差一点儿,去掉竞争深度 Q 网络后性能也差一点儿,去掉双深度 Q 网络却没什么差别。所以我们把全部方法组合在一起的时候,去掉双深度 Q 网络是影响比较小的。当我们使用分布式深度Q网络的时候,本质上就不会高估奖励。我们是为了避免高估奖励才加了DDQN。如果我们使用了分布式深度Q网络,就可能不会有高估的结果,多数的情况是低估奖励的,所以变成DDQN没有用。
为什么分布式深度Q网络不会高估奖励奖励,反而会低估奖励呢?因为分布式深度Q网络输出的是一个分布的范围,输出的范围不可能是无限的,我们一定会设一个限制, 比如最大输出范围就是从 -10 ~ 10。假设得到的奖励超过 10,比如 100 怎么办?我们就当作没看到这件事,所以奖励很极端的值、很大的值是会被丢弃的,用分布式深度Q网络的时候,我们不会高估奖励,反而会低估奖励。
8 针对连续动作的深度Q网络
与基于策略梯度的方法相比,深度Q网络比较稳定,策略梯度比较不稳定,玩大部分游戏不能使用策略梯度。
在没有近端策略优化之前,我们很难用策略梯度做什么事情。最早 DeepMind 的论文拿深度强化学习来玩雅达利的游戏,用的就是深度Q网络。深度Q网络比较容易训练的一个原因是:在深度Q网络里面,我们只要能够估计出Q函数,就保证一定可以找到一个比较好的策略。也就是我们只要能够估计出Q函数,就保证可以改进策略。而估计Q函数是比较容易的,因为它就是一个回归问题。在回归问题里面,我们可以通过观察回归的损失有没有下降,就可以知道模型学习得好不好,所以估计Q函数相较于学习一个策略是比较容易的。我们只要估计Q函数,就可以保证现在一定会得到比较好的策略,所以一般而言深度Q网络比较容易操作。
但深度Q网络其实存在一些问题,最大的问题是它很难处理连续动作。很多时候动作是连续的,比如我们玩雅达利的游戏时,智能体只需要决定如上、下、左、右这4个动作,这种动作是离散的。很多时候动作是连续的,例如,假设智能体要开车,它要决定方向盘要左转几度、右转几度,这种动作就是连续的。假设智能体是一个机器人,身上有 50 个 关节,它的每一个动作就对应身上 50 个关节的角度,而这些角度也是连续的。所以很多时候动作并不是离散的,它是一个向量,这个向量的每一个维度都有一个对应的值,这些值都是实数,它是连续的。如果动作是连续的,我们使用深度Q网络就会有困难。因为在使用深度Q网络时很重要的一步是我们要能够解决优化问题,也就是估计出 Q函数 Q ( s , a ) Q(s,a) Q(s,a) 以后,我们必须要找到一个 a a a,它可以让 Q ( s , a ) Q(s,a) Q(s,a) 最大,即
a = arg max a Q ( s , a ) a=\underset{a}{\arg \max} Q(s, a) a=aargmaxQ(s,a)
假设 a a a是离散的,即 a a a的可能性是有限的。例如,在雅达利的小游戏里面, a a a 就是上、下、左、右与开火,它是有限的,我们可以把每一个可能的动作都代入 Q 里面算它的 Q 值。但假如 a a a是连续的,我们无法穷举所有可能的连续动作,试试看哪一个连续动作可以让 Q 值最大。
怎么解决这个问题呢?我们有多种不同的方案,下面一一介绍。
8.1 方案 1:对动作进行采样
第1个方案是什么呢?我们可以采样出 N N N 个可能的 a a a: { a 1 , a 2 , ⋯ , a N } \left\{a_{1}, a_{2}, \cdots, a_{N}\right\} {a1,a2,⋯,aN} ,把它们一个一个地代入 Q函数,看谁的Q值最大。这个方案不会太低效,因为我们在运算的时候会使用 GPU,一次把 N N N 个连续动作都代入 Q函数,一次得到 N N N 个 Q 值,看谁最大。当然这不是一个非常精确的方案,因为我们没有办法进行太多的采样, 所以估计出来的 Q 值、最后决定的动作可能不是非常精确。
8.2 方案 2:梯度上升
第2个方案是什么呢?既然要解决的是一个优化问题(optimization problem),我们就要最大化目标函数(objective function)。要最大化目标函数, 我们就可以用梯度上升。我们把 a a a当作参数,要找一组 a a a去最大化Q函数,就用梯度上升去更新 a a a 的值,最后看看能不能找到一个 a a a最大化Q函数(目标函数)。但我们会遇到全局最大值(global maximum)的问题,不一定能够找到最优的结果,而且运算量显然很大, 因为要迭代地更新 a a a,训练一个网络就很花时间了。如果我们使用梯度上升的方案来处理连续的问题,每次决定采取哪一个动作的时候,还要训练一次网络,显然运算量是很大的。
8.3 方案 3:设计网络架构
第3个方案是特别设计网络的架构,特别设计Q函数来使得解决 arg max 操作的问题变得非常容易。
如图 4.26 所示,通常输入状态 s \boldsymbol{s} s 是图像,我们可以用向量或矩阵来表示它。输入 s \boldsymbol{s} s,Q函数会输出向量 μ ( s ) \pmb{\mu}(\boldsymbol{s}) μ(s)、矩阵 Σ ( s ) \pmb{\varSigma}(\boldsymbol{s}) Σ(s) 和标量 V ( s ) V(\boldsymbol{s}) V(s)。Q函数根据输入 s \boldsymbol{s} s与 a \boldsymbol{a} a 来决定输出值。到目前为止,Q函数只有输入 s \boldsymbol{s} s,它还没有输入 a \boldsymbol{a} a, a \boldsymbol{a} a 在哪里呢?接下来我们可以输入 a \boldsymbol{a} a,用 a \boldsymbol{a} a与 μ ( s ) \pmb{\mu}(\boldsymbol{s}) μ(s)、 Σ ( s ) \pmb{\varSigma}(\boldsymbol{s}) Σ(s)和 V ( s ) V(\boldsymbol{s}) V(s) 互相作用。Q函数 Q ( s , a ) Q(\boldsymbol{s},\boldsymbol{a}) Q(s,a)可定义为
Q ( s , a ) = − ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) + V ( s ) Q(\boldsymbol{s},\boldsymbol{a})=-(\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s}))^{\mathrm{T}} \pmb{\varSigma}(\boldsymbol{s})(\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s}))+V(\boldsymbol{s}) Q(s,a)=−(a−μ(s))TΣ(s)(a−μ(s))+V(s)
注意, a \boldsymbol{a} a现在是连续的动作,所以它是一个向量。假设我们要操作机器人,向量 a \boldsymbol{a} a的每一个维度可能就对应机器人的每一个关节,它的数值就是关节的角度。假设 a \boldsymbol{a} a 和 μ ( s ) \pmb{\mu}(\boldsymbol{s}) μ(s) 是列向量,那么 ( a − μ ( s ) ) T (\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s}))^{\mathrm{T}} (a−μ(s))T 是一个行向量。 Σ ( s ) \pmb{\varSigma}(\boldsymbol{s}) Σ(s) 是一个正定矩阵(positive-definite matrix),因为 Σ ( s ) = L L T \pmb{\varSigma}(\boldsymbol{s}) = \boldsymbol{L}\boldsymbol{L}^{\mathrm{T}} Σ(s)=LLT,其中 L \boldsymbol{L} L 为下三角矩阵(lower-triangular matrix)。 a \boldsymbol{a} a- μ ( s ) \pmb{\mu}(\boldsymbol{s}) μ(s)也是一个列向量。所以Q值即 − ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) + V ( s ) -(\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s}))^{\mathrm{T}} \pmb{\varSigma}(\boldsymbol{s})(\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s}))+V(\boldsymbol{s}) −(a−μ(s))TΣ(s)(a−μ(s))+V(s) 是标量。
我们要怎么找到一个 a \boldsymbol{a} a来最大化 Q 值呢?因为 ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) (\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s}))^{\mathrm{T}} \pmb{\varSigma}(\boldsymbol{s})(\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s})) (a−μ(s))TΣ(s)(a−μ(s)) 一定是正的,它前面有一个负号,假设我们不看负号,所以第一项 ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) (\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s}))^{\mathrm{T}} \pmb{\varSigma}(\boldsymbol{\boldsymbol{s}})(\boldsymbol{a}-\pmb{\mu}(\boldsymbol{s})) (a−μ(s))TΣ(s)(a−μ(s)) 的值越小,最终的 Q 值就越大。因为我们是把 V ( s ) V(\boldsymbol{s}) V(s) 减掉第一项,所以第一项的值越小,最后的 Q 值就越大。怎么让第一项的值最小呢?我们直接令 μ ( s ) \pmb{\mu}(\boldsymbol{s}) μ(s) 等于 a \boldsymbol{a} a,让第一项变成 0,就可以让第一项的值最小。 因此,令 μ ( s ) \pmb{\mu}(\boldsymbol{s}) μ(s) 等于 a \boldsymbol{a} a,我们就可以得到最大值,解决 arg max 操作的问题就变得非常容易。所以深度Q网络也可以用在连续的情况中,只是有一些局限:函数不能随便设置。
如果 n n n阶对称矩阵 A \boldsymbol{A} A 对于任意非零的 n n n维向量 x \boldsymbol{x} x都有 x T A x > 0 \boldsymbol{x}^\mathrm{T}\boldsymbol{A}\boldsymbol{x}>0 xTAx>0,则称矩阵 A \boldsymbol{A} A为正定矩阵。

8.4 方案 4:不使用深度Q网络
第4个方案就是不使用深度Q网络,用深度Q网络处理连续动作是比较麻烦的。如图 4.27 所示,我们将基于策略的方法————PPO 和基于价值的方法————深度Q网络结合在一起,就可以得到演员-评论员的方法。

参考文献
- Intro to Reinforcement Learning (强化学习纲要)
- 神经网络与深度学习
- 强化学习基础 David Silver 笔记
- 百面深度学习
- 机器学习(北理工)
- 苗光辉. 面向部分可观测环境的值迭代深度网络模型研究[D].北京理工大学,2018.
- 天授文档