目录
- 前言
- 特别声明:
- 代码下载:
- 功能介绍:
- 接线
- STM32
- STM32F1开发指南(精英版)-库函数版本_V1.2
- STM32中文参考手册
- RFID-RC522
- RFID射频模块电路原理图
- 使用图+效果图
- 测试程序0 RC522_Handle()
- 最终效果
- 一、先用手机软件NFC Writer读取空卡看看内容
- 1、打开软件和NFC(ps:我的手机是小米10)
- 2、将空卡贴于手机背部,弹出提示发现新卡,点击“好的”
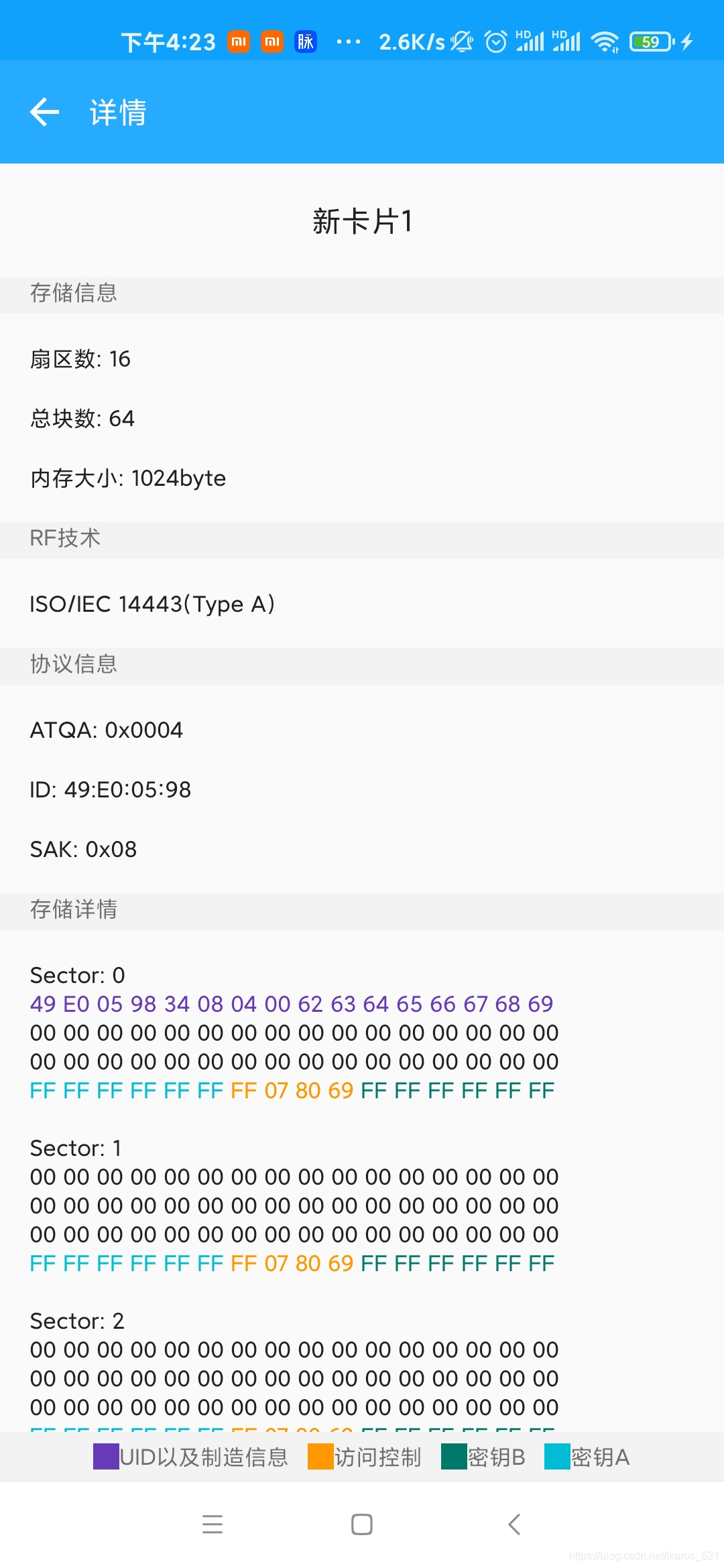
- 3、上面的新卡片左滑到新卡片1,单击这个卡片
- 4、进入卡片信息详细页面
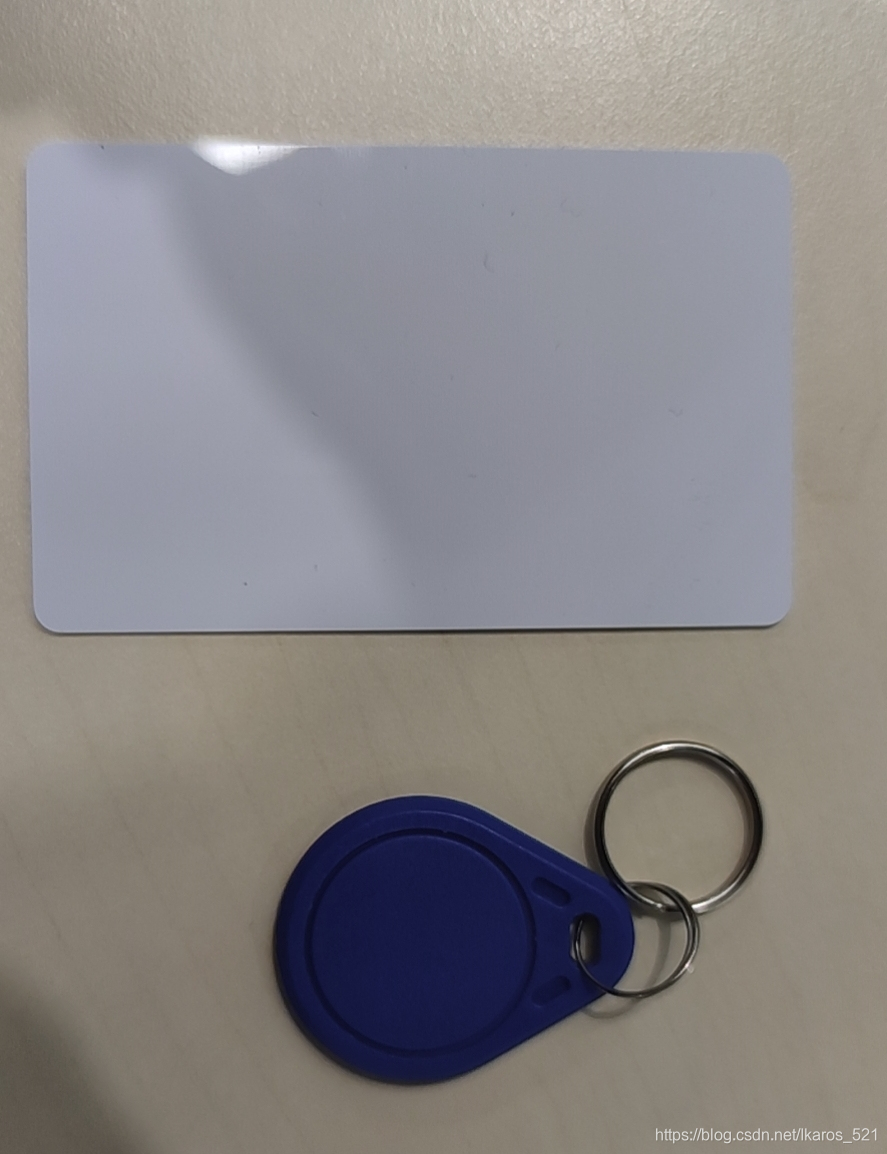
- 钥匙扣卡
- M1空白卡
- 二、编译、烧写程序
- 三、将钥匙扣卡发在模块上,打开串口,开始测试
- 测试程序1 RC522_Handle1()
- 核心代码
- main.c
- rc522.h
- rc522.c
- 额外资料
前言
特别声明:
-
本仓库发布的程序,仅用于测试和学习研究,禁止用于商业用途,不能保证其合法性,准确性,完整性和有效性,请根据情况自行判断。
-
本人对任何脚本问题概不负责,包括但不限于由任何脚本错误导致的任何损失或损害。
-
间接使用脚本的任何用户,包括但不限于建立VPS或在某些行为违反国家/地区法律或相关法规的情况下进行传播, 本人对于由此引起的任何隐私泄漏或其他后果概不负责。
-
任何以任何方式查看此项目的人或直接或间接使用该项目的任何程序的使用者都应仔细阅读此声明。本人保留随时更改或补充此免责声明的权利。一旦使用并复制了任何相关脚本或Script项目的规则,则视为您已接受此免责声明。
本文不含任何广告性质,仅供学习参考。写卡需谨慎!!!,不然可能会玩崩了。血的教训!!!

参考资料:
浅谈IC卡数据分析
智能卡 ISO14443 协议 解读
STM32F103ZET–RFID-RC522使用例程(战舰版)
M1卡使用说明书
M1卡介绍
STM32-RC522
Mifare1技术说明(M1卡说明文档)
源码参考:RFID-RC522,不能使用,我进行了一定的修改。下载参考下方传送门。
开发板:正点原子 STM32F103 精英版

语言:C语言
开发环境:Keil5
开发板使用了 LED SPI USART RFID-RC522模块 钥匙扣卡 M1卡

Win10软件 SSCOM串口调试 FlyMcu烧录(ps:电脑安装驱动CH340)
安卓软件 NFC Writer (手机需有NFC功能)

代码下载:
码云 GitHub
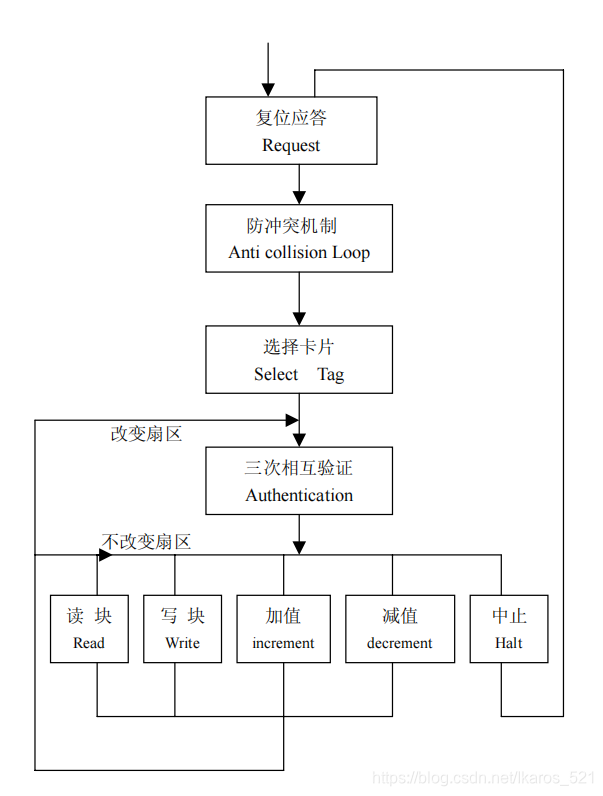
功能介绍:
寻卡-》防冲撞-》选卡-》验证2扇区密钥-》读取2扇区0区块数据-》写入数据到2扇区0区块-》再读取2扇区0区块数据。
串口打印卡UID,验证结果,读取到的2扇区0区块数据等信息。
注意:只有验证成功的扇区,才能对此扇区进行读写操作!
// 验证A密钥 块地址 密码 SN
// 注意:此处的块地址0x0B即2扇区3区块,此块地址只需要指向某一扇区就可以了,
// 即2扇区为0x08-0x0B这个范围都有效,且只能对验证过的扇区进行读写操作
status = PcdAuthState(0x60, 0x0B, KEY_A, SN);
// 读取M1卡一块数据 块地址 读取的数据
// 注意:因为上面验证的扇区是2扇区,所以只能对2扇区的数据进行读写,即0x08-0x0B这个范围,
// 超出范围读取失败。
status = PcdRead(0x08, DATA);
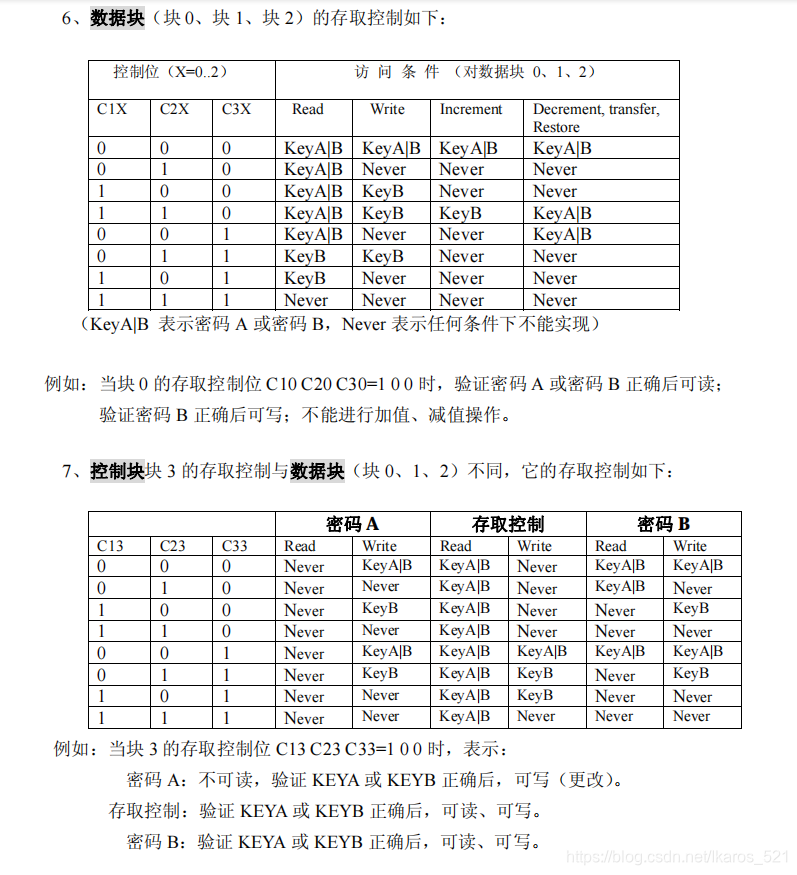
另外:3区块的密钥A单片机读取出来是全00,手机是全ff
控制字的默认值是“FF078069”,此时
A密钥:不可被读出,有全部权限
B密钥:可被读出,没有任何权限
下图参考:https://blog.csdn.net/hiwoshixiaoyu/article/details/104048663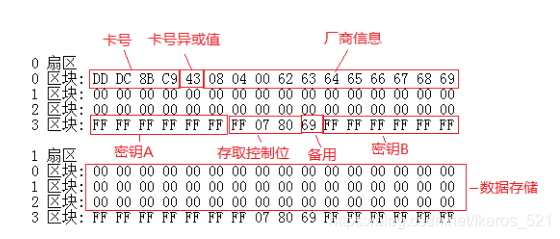
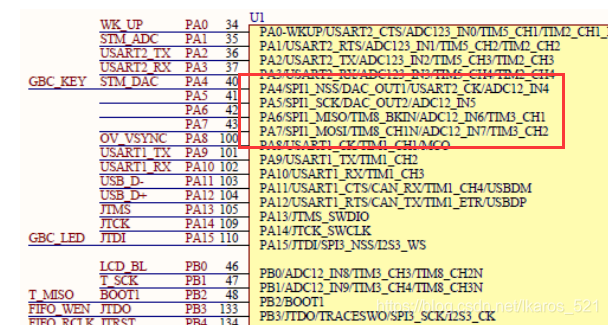
接线
1--SDA <----->PA4
2--SCK <----->PA5
3--MOSI <----->PA7
4--MISO <----->PA6
5--悬空
6--GND <----->GND
7--RST <----->PB0
8--VCC <----->VCC

STM32
STM32F1开发指南(精英版)-库函数版本_V1.2
STM32中文参考手册
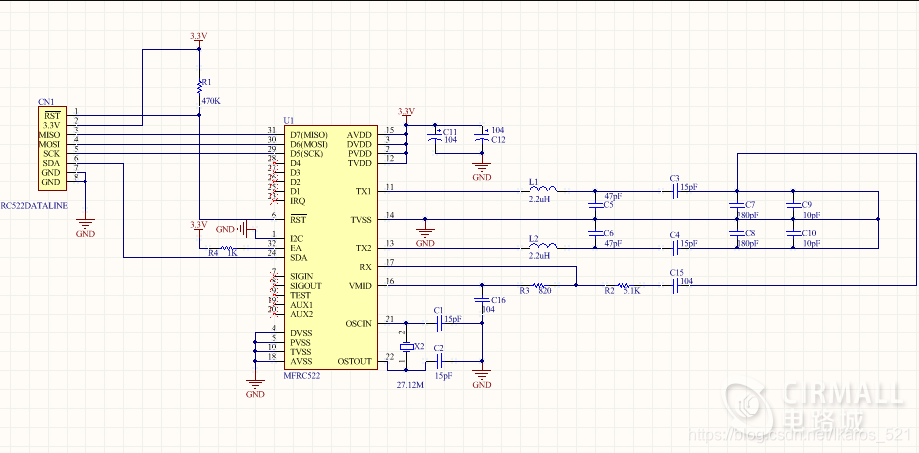
RFID-RC522
参考:https://www.cirmall.com/circuit/2149/
RFID射频模块电路原理图
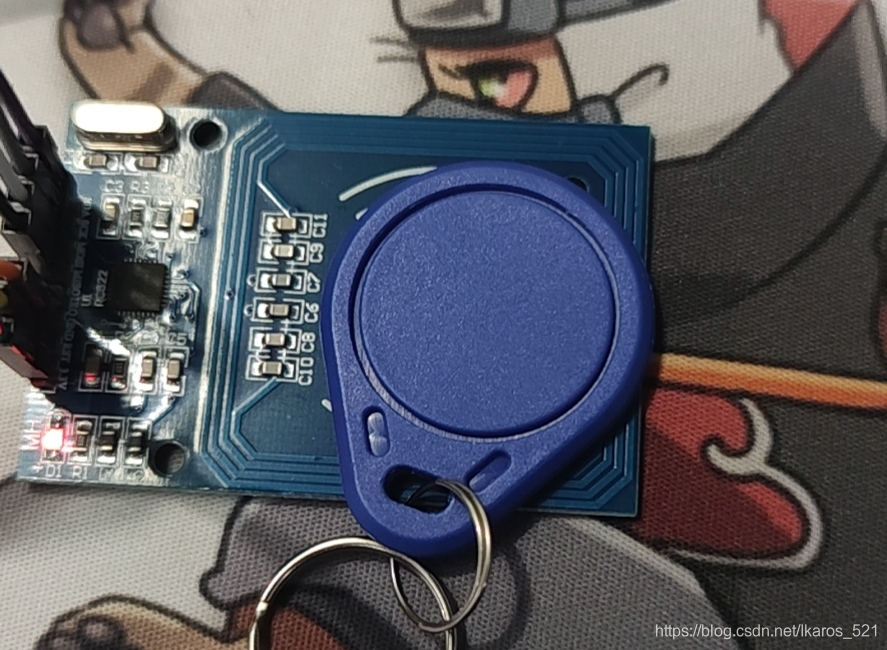
使用图+效果图
测试程序0 RC522_Handle()
最终效果

一、先用手机软件NFC Writer读取空卡看看内容
1、打开软件和NFC(ps:我的手机是小米10)

2、将空卡贴于手机背部,弹出提示发现新卡,点击“好的”
3、上面的新卡片左滑到新卡片1,单击这个卡片

4、进入卡片信息详细页面
钥匙扣卡
M1空白卡

可以发现2张卡除了卡号和卡号异或值不同外,其他数据都一样,之后的例子都以钥匙扣卡举例。
下图参考:https://blog.csdn.net/hiwoshixiaoyu/article/details/104048663

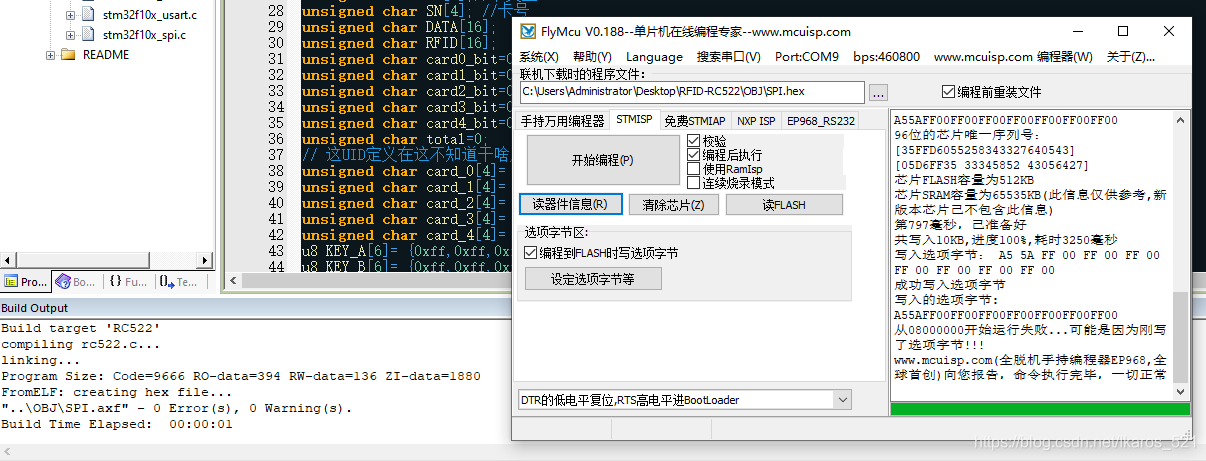
二、编译、烧写程序
三、将钥匙扣卡发在模块上,打开串口,开始测试
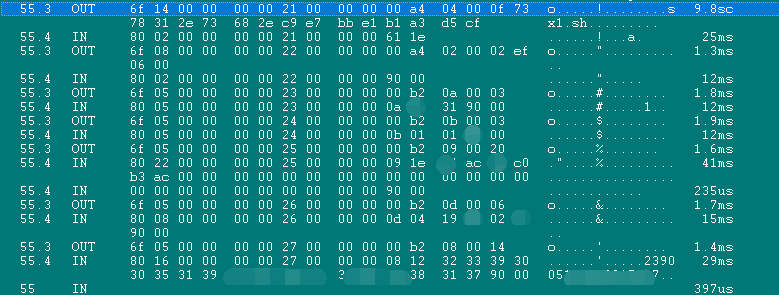
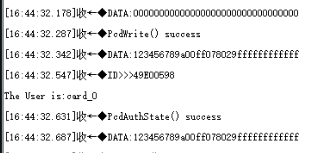
串口打印
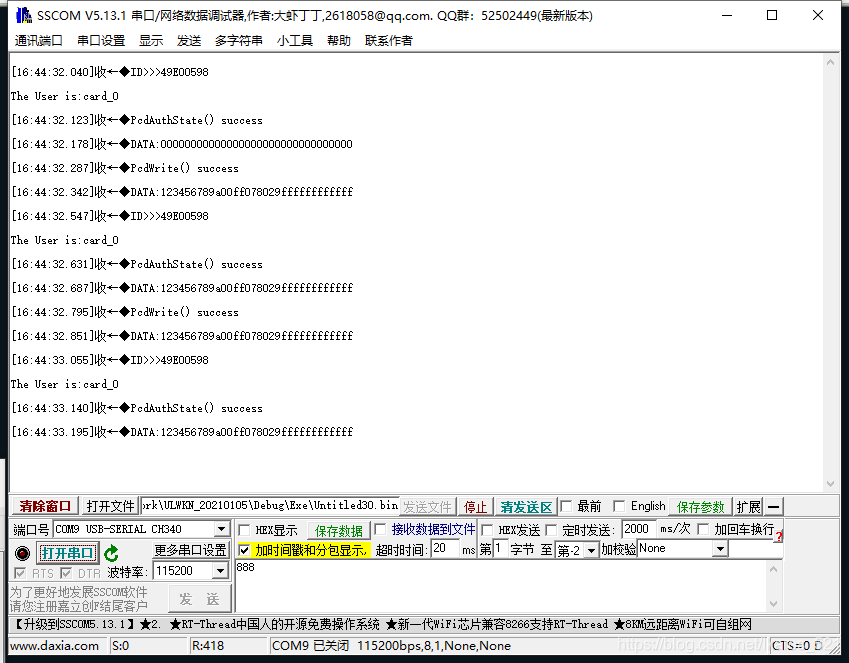
注意 原卡 2扇区0区块数据为

我们放上卡后,进行了数据写入,之后读取到的数据都为DATA1的数据0.0
unsigned char DATA1[16]= {0x12,0x34,0x56,0x78,0x9A,0x00,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
// 0x08 就是2扇区0区块(即第9块)
unsigned char addr=0x08;
status = PcdWrite(addr, DATA1);
此时数据写入完毕后,我们再将钥匙扣卡贴于手机,看看现在手机读取出来的结果

OK,看样子写入成功了,那么到此例程就结束了。
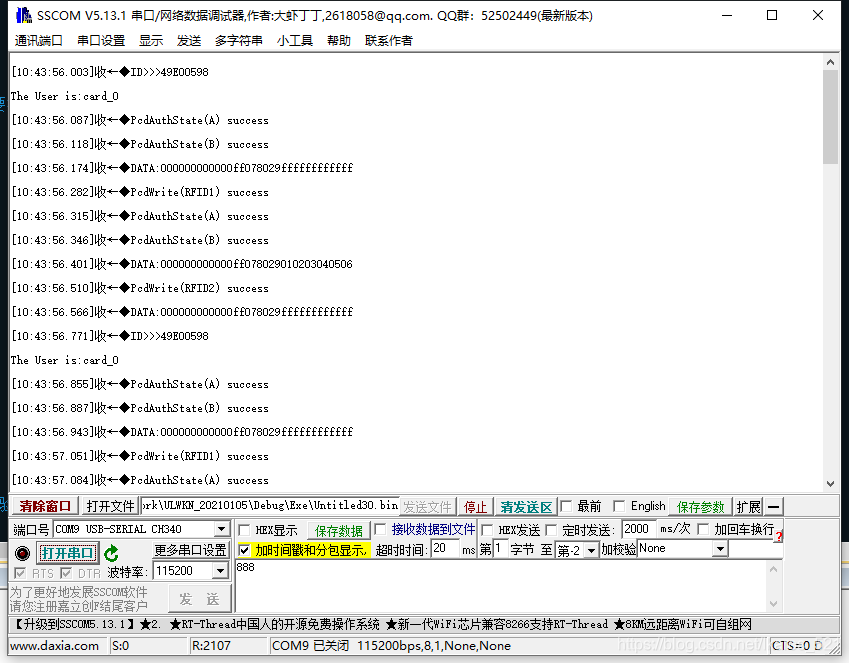
测试程序1 RC522_Handle1()
测试程序1,完成0x0F块 验证KEY_A、KEY_B 读 写RFID1 验证KEY_A1、KEY_B1 读 写RFID2
// 测试用 3区块数据
unsigned char RFID1[16]= {0x10,0x20,0x30,0x40,0x50,0x60,0xff,0x07,0x80,0x29,0x01,0x02,0x03,0x04,0x05,0x06};
unsigned char RFID2[16]= {0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
// 测试用 3区块密钥
u8 KEY_A1[6]= {0x10,0x20,0x30,0x40,0x50,0x60};
u8 KEY_B1[6]= {0x01,0x02,0x03,0x04,0x05,0x06};
核心代码
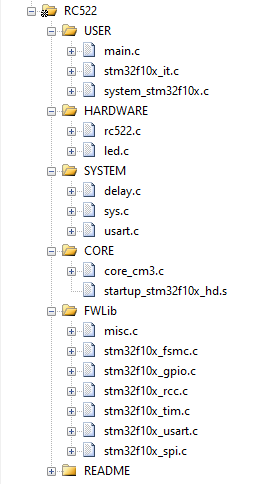
main.c
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "rc522.h"
#include "led.h"/**
* 连线说明:
* 1--SDA <----->PA4
* 2--SCK <----->PA5
* 3--MOSI <----->PA7
* 4--MISO <----->PA6
* 5--悬空
* 6--GND <----->GND
* 7--RST <----->PB0
* 8--VCC <----->VCC
**/int main(void)
{u8 num = 0;delay_init(); //延时函数初始化NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级uart_init(115200); //串口初始化为115200LED_Init();RC522_Init(); //初始化射频卡模块while(1){// 重要提醒,写卡操作有风险,请勿随意尝试,不能保证程序安全性,本人对任何程序问题概不负责,不限于由任何程序错误导致的任何损失或损害// 测试程序0,完成addr读写读RC522_Handle();// 谨慎使用 测试程序1,完成0x0F块 验证KEY_A、KEY_B 读 写RFID1 验证KEY_A1、KEY_B1 读 写RFID2// RC522_Handle1();if(num % 20 == 0)LED0 = !LED0;num++;}
}rc522.h
#ifndef __RC522_H
#define __RC522_H
#include "sys.h"
#include "stm32f10x.h"/
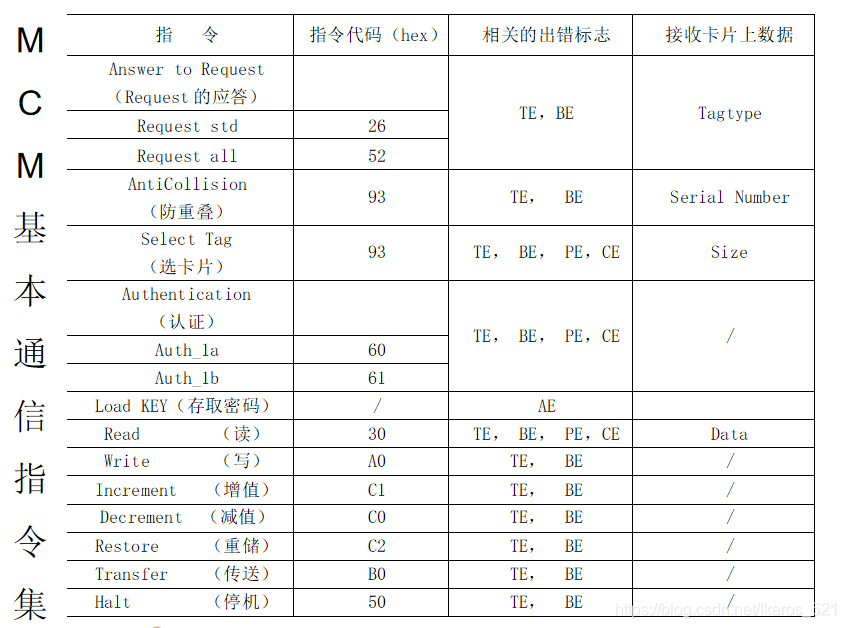
//MF522命令字
/
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠/
//MF522 FIFO长度定义
/
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
#define MAXRLEN 18/
//MF522寄存器定义
/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F/
//和MF522通讯时返回的错误代码
/
#define MI_OK 0
#define MI_NOTAGERR (1)
#define MI_ERR (2)#define SHAQU1 0X01
#define KUAI4 0X04
#define KUAI7 0X07
#define REGCARD 0xa1
#define CONSUME 0xa2
#define READCARD 0xa3
#define ADDMONEY 0xa4//
//#define spi_cs 1;
//sbit spi_ck=P0^6;
//sbit spi_mosi=P0^7;
//sbit spi_miso=P4^1;
//sbit spi_rst=P2^7;
#define SPIReadByte() SPIWriteByte(0)
u8 SPIWriteByte(u8 byte);
void SPI1_Init(void);
//void SPI2_Init(void);#define SET_SPI_CS (GPIOF->BSRR=0X01)
#define CLR_SPI_CS (GPIOF->BRR=0X01)#define SET_RC522RST GPIOF->BSRR=0X02
#define CLR_RC522RST GPIOF->BRR=0X02/***********************RC522 函数宏定义**********************/
#define RC522_CS_Enable() GPIO_ResetBits ( GPIOA, GPIO_Pin_4 )
#define RC522_CS_Disable() GPIO_SetBits ( GPIOA, GPIO_Pin_4 )#define RC522_Reset_Enable() GPIO_ResetBits( GPIOB, GPIO_Pin_0 )
#define RC522_Reset_Disable() GPIO_SetBits ( GPIOB, GPIO_Pin_0 )#define RC522_SCK_0() GPIO_ResetBits( GPIOA, GPIO_Pin_5 )
#define RC522_SCK_1() GPIO_SetBits ( GPIOA, GPIO_Pin_5 )#define RC522_MOSI_0() GPIO_ResetBits( GPIOA, GPIO_Pin_7 )
#define RC522_MOSI_1() GPIO_SetBits ( GPIOA, GPIO_Pin_7 )#define RC522_MISO_GET() GPIO_ReadInputDataBit ( GPIOA, GPIO_Pin_6 )void RC522_Handle (void); // 测试程序0,完成addr读写读
void RC522_Handle1 (void); // 测试程序1,完成0x0F块 验证KEY_A、KEY_B 读 写RFID1 验证KEY_A1、KEY_B1 读 写RFID2
void RC522_data_break (void); // 测试用数据爆破程序,仅供学习参考,请勿非法使用
void RC522_Init ( void ); //初始化
void PcdReset ( void ); //复位
void M500PcdConfigISOType ( u8 type ); //工作方式
char PcdRequest ( u8 req_code, u8 * pTagType ); //寻卡
char PcdAnticoll ( u8 * pSnr); //读卡号char PcdSelect ( u8 * pSnr );
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr );
char PcdWrite ( u8 ucAddr, u8 * pData );
char PcdRead ( u8 ucAddr, u8 * pData );
void ShowID(u8 *p); //显示卡的卡号,以十六进制显示extern char* POINT_LNG;
extern char* POINT_LAT;
extern char* POINT_LNG_ON;
extern char* POINT_LAT_ON;
extern char* POINT_LNG_OFF;
extern char* POINT_LAT_OFF;#endifrc522.c
#include "sys.h"
#include "rc522.h"
#include "delay.h"
#include "usart.h"
#include "string.h"//
// M1卡分为16个扇区,每个扇区由四个块(块0、块1、块2、块3)组成
// 将16个扇区的64个块按绝对地址编号为:0~63
// 第0个扇区的块0(即绝对地址0块),用于存放厂商代码,已经固化不可更改
// 每个扇区的块0、块1、块2为数据块,可用于存放数据
// 每个扇区的块3为控制块(绝对地址为:块3、块7、块11.....)包括密码A,存取控制、密码B等/*******************************
*连线说明:
*1--SDA <----->PA4
*2--SCK <----->PA5
*3--MOSI <----->PA7
*4--MISO <----->PA6
*5--悬空
*6--GND <----->GND
*7--RST <----->PB0
*8--VCC <----->VCC
************************************//*全局变量*/
unsigned char CT[2];//卡类型
unsigned char SN[4]; //卡号
unsigned char DATA[16]; //存放数据
unsigned char RFID[16]; //存放RFID
unsigned char card0_bit=0;
unsigned char card1_bit=0;
unsigned char card2_bit=0;
unsigned char card3_bit=0;
unsigned char card4_bit=0;
unsigned char total=0;
// 这UID定义在这不知道干啥用的。。。 替换成自己卡的UID
unsigned char card_0[4]= {73,224,5,152};
unsigned char card_1[4]= {105,102,100,152};
unsigned char card_2[4]= {208,121,31,57};
unsigned char card_3[4]= {176,177,143,165};
unsigned char card_4[4]= {5,158,10,136};
u8 KEY_A[6]= {0xff,0xff,0xff,0xff,0xff,0xff};
u8 KEY_B[6]= {0xff,0xff,0xff,0xff,0xff,0xff};
u8 AUDIO_OPEN[6] = {0xAA, 0x07, 0x02, 0x00, 0x09, 0xBC};
// 测试用 3区块数据
unsigned char RFID1[16]= {0x10,0x20,0x30,0x40,0x50,0x60,0xff,0x07,0x80,0x29,0x01,0x02,0x03,0x04,0x05,0x06};
unsigned char RFID2[16]= {0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
// 测试用 3区块密钥
u8 KEY_A1[6]= {0x10,0x20,0x30,0x40,0x50,0x60};
u8 KEY_A2[6]= {0x00,0x00,0x00,0x00,0x00,0x00};
u8 KEY_B1[6]= {0x01,0x02,0x03,0x04,0x05,0x06};
u8 KEY_B2[6]= {0x10,0x20,0x30,0x00,0x00,0x00};
u8 KEY_B3[6]= {0x01,0x02,0x03,0x00,0x00,0x00};
// 置零用
unsigned char DATA0[16]= {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char DATA1[16]= {0x12,0x34,0x56,0x78,0x9A,0x00,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
unsigned char status;
// 0x08 就是2扇区0区块(即第9块)
unsigned char addr=0x08;
// unsigned char addr=0x08;#define RC522_DELAY() delay_us( 20 )// 测试程序0,完成addr读写读
void RC522_Handle(void)
{u8 i = 0;status = PcdRequest(PICC_REQALL,CT);//寻卡// printf("\r\nstatus>>>>>>%d\r\n", status);if(status==MI_OK)// 寻卡成功{status=MI_ERR;status = PcdAnticoll(SN);// 防冲撞 获得UID 存入SN}if (status==MI_OK)// 防冲撞成功{status = MI_ERR;ShowID(SN); // 串口打印卡的ID号 UID// 难道就是为了做个判断吗。。。if((SN[0]==card_0[0])&&(SN[1]==card_0[1])&&(SN[2]==card_0[2])&&(SN[3]==card_0[3])){card0_bit=1;printf("\r\nThe User is:card_0\r\n");}if((SN[0]==card_1[0])&&(SN[1]==card_1[1])&&(SN[2]==card_1[2])&&(SN[3]==card_1[3])){card1_bit=1;printf("\r\nThe User is:card_1\r\n");}if((SN[0]==card_2[0])&&(SN[1]==card_2[1])&&(SN[2]==card_2[2])&&(SN[3]==card_2[3])){card2_bit=1;printf("\r\nThe User is:card_2\r\n");}if((SN[0]==card_3[0])&&(SN[1]==card_3[1])&&(SN[2]==card_3[2])&&(SN[3]==card_3[3])){card3_bit=1;printf("\r\nThe User is:card_3\r\n");}if((SN[0]==card_4[0])&&(SN[1]==card_4[1])&&(SN[2]==card_4[2])&&(SN[3]==card_4[3])){card4_bit=1;printf("\r\nThe User is:card_4\r\n");}//total = card1_bit+card2_bit+card3_bit+card4_bit+card0_bit;status = PcdSelect(SN);}else{}if(status == MI_OK)//选卡成功{status = MI_ERR;// 验证A密钥 块地址 密码 SN // 注意:此处的块地址0x0B即2扇区3区块,可以替换成变量addr ,此块地址只需要指向某一扇区就可以了,即2扇区为0x08-0x0B这个范围都有效,且只能对验证过的扇区进行读写操作status = PcdAuthState(0x60, 0x0B, KEY_A, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(A) success\r\n");}else{printf("PcdAuthState(A) failed\r\n");}// 验证B密钥 块地址 密码 SN 块地址0x0B即2扇区3区块,可以替换成变量addrstatus = PcdAuthState(0x61, 0x0B, KEY_B, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(B) success\r\n");}else{printf("PcdAuthState(B) failed\r\n");}}if(status == MI_OK)//验证成功{status = MI_ERR;// 读取M1卡一块数据 块地址 读取的数据 注意:因为上面验证的扇区是2扇区,所以只能对2扇区的数据进行读写,即0x08-0x0B这个范围,超出范围读取失败。status = PcdRead(addr, DATA);if(status == MI_OK)//读卡成功{// printf("RFID:%s\r\n", RFID);printf("DATA:");for(i = 0; i < 16; i++){printf("%02x", DATA[i]);}printf("\r\n");}else{printf("PcdRead() failed\r\n");}}if(status == MI_OK)//读卡成功{status = MI_ERR;printf("Write the card after 1 second. Do not move the card!!!\r\n");delay_ms(1000);// status = PcdWrite(addr, DATA0);// 写数据到M1卡一块status = PcdWrite(addr, DATA1);if(status == MI_OK)//写卡成功{printf("PcdWrite() success\r\n");}else{printf("PcdWrite() failed\r\n");delay_ms(3000);}}if(status == MI_OK)//写卡成功{status = MI_ERR;// 读取M1卡一块数据 块地址 读取的数据status = PcdRead(addr, DATA);if(status == MI_OK)//读卡成功{// printf("DATA:%s\r\n", DATA);printf("DATA:");for(i = 0; i < 16; i++){printf("%02x", DATA[i]);}printf("\r\n");}else{printf("PcdRead() failed\r\n");}}if(status == MI_OK)//读卡成功{status = MI_ERR;printf("RC522_Handle() run finished after 1 second!\r\n");delay_ms(1000);}
}// 测试程序1,完成0x0F块 验证KEY_A、KEY_B 读 写RFID1 验证KEY_A1、KEY_B1 读 写RFID2
void RC522_Handle1(void)
{u8 i = 0;unsigned char test_addr=0x0F;status = PcdRequest(PICC_REQALL,CT);//寻卡// printf("\r\nstatus>>>>>>%d\r\n", status);if(status==MI_OK)// 寻卡成功{status=MI_ERR;status = PcdAnticoll(SN);// 防冲撞 获得UID 存入SN}if (status==MI_OK)// 防冲撞成功{status = MI_ERR;ShowID(SN); // 串口打印卡的ID号 UID// 难道就是为了做个判断吗。。。if((SN[0]==card_0[0])&&(SN[1]==card_0[1])&&(SN[2]==card_0[2])&&(SN[3]==card_0[3])){card0_bit=1;printf("\r\nThe User is:card_0\r\n");}if((SN[0]==card_1[0])&&(SN[1]==card_1[1])&&(SN[2]==card_1[2])&&(SN[3]==card_1[3])){card1_bit=1;printf("\r\nThe User is:card_1\r\n");}status = PcdSelect(SN);}else{}if(status == MI_OK)//选卡成功{status = MI_ERR;// 验证A密钥 块地址 密码 SN // 注意:此处的块地址0x0F即3扇区3区块,此块地址只需要指向某一扇区就可以了,即3扇区为0x0C-0x0F这个范围都有效,且只能对验证过的扇区进行读写操作status = PcdAuthState(0x60, test_addr, KEY_A, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(A) success\r\n");}else{printf("PcdAuthState(A) failed\r\n");status = MI_OK;goto P1;}// 验证B密钥 块地址 密码 SN status = PcdAuthState(0x61, test_addr, KEY_B, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(B) success\r\n");}else{printf("PcdAuthState(B) failed\r\n");}}if(status == MI_OK)//验证成功{status = MI_ERR;// 读取M1卡一块数据 块地址 读取的数据 注意:因为上面验证的扇区是3扇区,所以只能对2扇区的数据进行读写,即0x0C-0x0F这个范围,超出范围读取失败。status = PcdRead(test_addr, DATA);if(status == MI_OK)//读卡成功{// printf("RFID:%s\r\n", RFID);printf("DATA:");for(i = 0; i < 16; i++){printf("%02x", DATA[i]);}printf("\r\n");}else{printf("PcdRead() failed\r\n");}}if(status == MI_OK)//读卡成功{status = MI_ERR;// 写数据到M1卡一块status = PcdWrite(test_addr, RFID1);if(status == MI_OK)//写卡成功{printf("PcdWrite(RFID1) success\r\n");}else{printf("PcdWrite(RFID1) failed\r\n");delay_ms(3000);}}P1: if(status == MI_OK)//写卡成功{status = MI_ERR;// 验证A密钥 块地址 密码 SN // 注意:此处的块地址0x0F即3扇区3区块,此块地址只需要指向某一扇区就可以了,即3扇区为0x0C-0x0F这个范围都有效,且只能对验证过的扇区进行读写操作status = PcdAuthState(0x60, test_addr, KEY_A1, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(A1) success\r\n");}else{printf("PcdAuthState(A1) failed\r\n");}// 验证B密钥 块地址 密码 SN status = PcdAuthState(0x61, test_addr, KEY_B1, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(B1) success\r\n");}else{printf("PcdAuthState(B1) failed\r\n");}}if(status == MI_OK)//验证成功{status = MI_ERR;// 读取M1卡一块数据 块地址 读取的数据 注意:因为上面验证的扇区是3扇区,所以只能对2扇区的数据进行读写,即0x0C-0x0F这个范围,超出范围读取失败。status = PcdRead(test_addr, DATA);if(status == MI_OK)//读卡成功{// printf("RFID:%s\r\n", RFID);printf("DATA:");for(i = 0; i < 16; i++){printf("%02x", DATA[i]);}printf("\r\n");}else{printf("PcdRead() failed\r\n");}}if(status == MI_OK)//读卡成功{status = MI_ERR;// 写数据到M1卡一块status = PcdWrite(test_addr, RFID2);if(status == MI_OK)//写卡成功{printf("PcdWrite(RFID2) success\r\n");}else{printf("PcdWrite(RFID2) failed\r\n");delay_ms(3000);}}if(status == MI_OK)//写卡成功{status = MI_ERR;// 读取M1卡一块数据 块地址 读取的数据status = PcdRead(test_addr, DATA);if(status == MI_OK)//读卡成功{// printf("DATA:%s\r\n", DATA);printf("DATA:");for(i = 0; i < 16; i++){printf("%02x", DATA[i]);}printf("\r\n");}else{printf("PcdRead() failed\r\n");}}if(status == MI_OK)//读卡成功{status = MI_ERR;printf("RC522_Handle1() run finished after 1 second!\r\n");delay_ms(1000);}
}// 测试用数据爆破程序,仅供学习参考,请勿非法使用 针对card_0进行破解
void RC522_data_break(void)
{// 爆破的块地址unsigned char break_addr = 0x0F;u8 i = 0;/*u8 key_arr[257] = { 0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A, 0x0B, 0x0C, 0x0D, 0x0E, 0x0F, 0x10, 0x11, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18, 0x19, 0x1A, 0x1B, 0x1C, 0x1D, 0x1E, 0x1F, 0x20, 0x21, 0x22, 0x23, 0x24, 0x25, 0x26, 0x27, 0x28, 0x29, 0x2A, 0x2B, 0x2C, 0x2D, 0x2E, 0x2F, 0x30, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37, 0x38, 0x39, 0x3A, 0x3B, 0x3C, 0x3D, 0x3E, 0x3F, 0x40, 0x41, 0x42, 0x43, 0x44, 0x45, 0x46, 0x47, 0x48, 0x49, 0x4A, 0x4B, 0x4C, 0x4D, 0x4E, 0x4F, 0x50, 0x51, 0x52, 0x53, 0x54, 0x55, 0x56, 0x57, 0x58, 0x59, 0x5A, 0x5B, 0x5C, 0x5D, 0x5E, 0x5F, 0x60, 0x61, 0x62, 0x63, 0x64, 0x65, 0x66, 0x67, 0x68, 0x69, 0x6A, 0x6B, 0x6C, 0x6D, 0x6E, 0x6F, 0x70, 0x71, 0x72, 0x73, 0x74, 0x75, 0x76, 0x77, 0x78, 0x79, 0x7A, 0x7B, 0x7C, 0x7D, 0x7E, 0x7F, 0x80, 0x81, 0x82, 0x83, 0x84, 0x85, 0x86, 0x87, 0x88, 0x89, 0x8A, 0x8B, 0x8C, 0x8D, 0x8E, 0x8F, 0x90, 0x91, 0x92, 0x93, 0x94, 0x95, 0x96, 0x97, 0x98, 0x99, 0x9A, 0x9B, 0x9C, 0x9D, 0x9E, 0x9F, 0xA0, 0xA1, 0xA2, 0xA3, 0xA4, 0xA5, 0xA6, 0xA7, 0xA8, 0xA9, 0xAA, 0xAB, 0xAC, 0xAD, 0xAE, 0xAF, 0xB0, 0xB1, 0xB2, 0xB3, 0xB4, 0xB5, 0xB6, 0xB7, 0xB8, 0xB9, 0xBA, 0xBB, 0xBC, 0xBD, 0xBE, 0xBF, 0xC0, 0xC1, 0xC2, 0xC3, 0xC4, 0xC5, 0xC6, 0xC7, 0xC8, 0xC9, 0xCA, 0xCB, 0xCC, 0xCD, 0xCE, 0xCF, 0xD0, 0xD1, 0xD2, 0xD3, 0xD4, 0xD5, 0xD6, 0xD7, 0xD8, 0xD9, 0xDA, 0xDB, 0xDC, 0xDD, 0xDE, 0xDF, 0xE0, 0xE1, 0xE2, 0xE3, 0xE4, 0xE5, 0xE6, 0xE7, 0xE8, 0xE9, 0xEA, 0xEB, 0xEC, 0xED, 0xEE, 0xEF, 0xF0, 0xF1, 0xF2, 0xF3, 0xF4, 0xF5, 0xF6, 0xF7, 0xF8, 0xF9, 0xFA, 0xFB, 0xFC, 0xFD, 0xFE, 0xFF };*/u8 break_KEY[6]= {0, 0, 0, 0, 0, 0};status = PcdRequest(PICC_REQALL,CT);//寻卡// printf("\r\nstatus>>>>>>%d\r\n", status);if(status==MI_OK)// 寻卡成功{status=MI_ERR;status = PcdAnticoll(SN);// 防冲撞 获得UID 存入SN}if (status==MI_OK)// 防冲撞成功{status = MI_ERR;ShowID(SN); // 串口打印卡的ID号 UID// 难道就是为了做个判断吗。。。if((SN[0]==card_0[0])&&(SN[1]==card_0[1])&&(SN[2]==card_0[2])&&(SN[3]==card_0[3])){card0_bit=1;printf("\r\nThe User is:card_0\r\n");}else{printf("\r\nThe User isn't:card_0\r\n");return;}status = PcdSelect(SN);}else{}if(status == MI_OK)//选卡成功{status = MI_ERR;// 自由发挥 。。。// 验证A密钥 块地址 密码 SN // 注意:此处的块地址0x0F即3扇区3区块,此块地址只需要指向某一扇区就可以了,即3扇区为0x0C-0x0F这个范围都有效,且只能对验证过的扇区进行读写操作status = PcdAuthState(0x60, break_addr, break_KEY, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(A) success\r\n");}else{printf("PcdAuthState(A) failed\r\n");status = MI_OK;}// 验证B密钥 块地址 密码 SN status = PcdAuthState(0x61, break_addr, break_KEY, SN);if(status == MI_OK)//验证成功{printf("PcdAuthState(B) success\r\n");}else{printf("PcdAuthState(B) failed\r\n");}}if(status == MI_OK)//验证成功{status = MI_ERR;// 读取M1卡一块数据 块地址 读取的数据 注意:因为上面验证的扇区是3扇区,所以只能对2扇区的数据进行读写,即0x0C-0x0F这个范围,超出范围读取失败。status = PcdRead(break_addr, DATA);if(status == MI_OK)//读卡成功{// printf("RFID:%s\r\n", RFID);printf("DATA:");for(i = 0; i < 16; i++){printf("%02x", DATA[i]);}printf("\r\n");}else{printf("PcdRead() failed\r\n");}}delay_ms(3000);
}void RC522_Init ( void )
{SPI1_Init();RC522_Reset_Disable();RC522_CS_Disable();PcdReset ();M500PcdConfigISOType ( 'A' );//设置工作方式}void SPI1_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;SPI_InitTypeDef SPI_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE );//PORTA、B时钟使能RCC_APB1PeriphClockCmd( RCC_APB2Periph_SPI1, ENABLE ); //SPI1时钟使能// CSGPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化PF0、PF1// SCKGPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure);// MISOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure);// MOSIGPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure);// RSTGPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOB, &GPIO_InitStructure);SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPISPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平// SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;// SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //串行同步时钟的第一个跳变沿(下降)数据被采样SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升)数据被采样SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制// RC522 SPI通讯时钟周期最小为100ns 即频率最大为10MHZ// RC522 数据在下降沿变化SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256、传输速率36M/256=140.625KHzSPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器SPI_Cmd(SPI1, ENABLE); //使能SPI外设
}/** 函数名:SPI_RC522_SendByte* 描述 :向RC522发送1 Byte 数据* 输入 :byte,要发送的数据* 返回 : RC522返回的数据* 调用 :内部调用*/
void SPI_RC522_SendByte ( u8 byte )
{u8 counter;for(counter=0; counter<8; counter++){if ( byte & 0x80 )RC522_MOSI_1 ();elseRC522_MOSI_0 ();RC522_DELAY();RC522_SCK_0 ();RC522_DELAY();RC522_SCK_1();RC522_DELAY();byte <<= 1;}
}/** 函数名:SPI_RC522_ReadByte* 描述 :从RC522发送1 Byte 数据* 输入 :无* 返回 : RC522返回的数据* 调用 :内部调用*/
u8 SPI_RC522_ReadByte ( void )
{u8 counter;u8 SPI_Data;for(counter=0; counter<8; counter++){SPI_Data <<= 1;RC522_SCK_0 ();RC522_DELAY();if ( RC522_MISO_GET() == 1)SPI_Data |= 0x01;RC522_DELAY();RC522_SCK_1 ();RC522_DELAY();}// printf("****%c****",SPI_Data);return SPI_Data;
}/** 函数名:ReadRawRC* 描述 :读RC522寄存器* 输入 :ucAddress,寄存器地址* 返回 : 寄存器的当前值* 调用 :内部调用*/
u8 ReadRawRC ( u8 ucAddress )
{u8 ucAddr, ucReturn;ucAddr = ( ( ucAddress << 1 ) & 0x7E ) | 0x80;RC522_CS_Enable();SPI_RC522_SendByte ( ucAddr );ucReturn = SPI_RC522_ReadByte ();RC522_CS_Disable();return ucReturn;
}/** 函数名:WriteRawRC* 描述 :写RC522寄存器* 输入 :ucAddress,寄存器地址* ucValue,写入寄存器的值* 返回 : 无* 调用 :内部调用*/
void WriteRawRC ( u8 ucAddress, u8 ucValue )
{u8 ucAddr;ucAddr = ( ucAddress << 1 ) & 0x7E;RC522_CS_Enable();SPI_RC522_SendByte ( ucAddr );SPI_RC522_SendByte ( ucValue );RC522_CS_Disable();
}/** 函数名:SetBitMask* 描述 :对RC522寄存器置位* 输入 :ucReg,寄存器地址* ucMask,置位值* 返回 : 无* 调用 :内部调用*/
void SetBitMask ( u8 ucReg, u8 ucMask )
{u8 ucTemp;ucTemp = ReadRawRC ( ucReg );WriteRawRC ( ucReg, ucTemp | ucMask ); // set bit mask
}/** 函数名:ClearBitMask* 描述 :对RC522寄存器清位* 输入 :ucReg,寄存器地址* ucMask,清位值* 返回 : 无* 调用 :内部调用*/
void ClearBitMask ( u8 ucReg, u8 ucMask )
{u8 ucTemp;ucTemp = ReadRawRC ( ucReg );WriteRawRC ( ucReg, ucTemp & ( ~ ucMask) ); // clear bit mask
}/** 函数名:PcdAntennaOn* 描述 :开启天线* 输入 :无* 返回 : 无* 调用 :内部调用*/
void PcdAntennaOn ( void )
{u8 uc;uc = ReadRawRC ( TxControlReg );if ( ! ( uc & 0x03 ) )SetBitMask(TxControlReg, 0x03);
}/** 函数名:PcdAntennaOff* 描述 :开启天线* 输入 :无* 返回 : 无* 调用 :内部调用*/
void PcdAntennaOff ( void )
{ClearBitMask ( TxControlReg, 0x03 );
}/** 函数名:PcdRese* 描述 :复位RC522* 输入 :无* 返回 : 无* 调用 :外部调用*/
void PcdReset ( void )
{RC522_Reset_Disable();delay_us ( 1 );RC522_Reset_Enable();delay_us ( 1 );RC522_Reset_Disable();delay_us ( 1 );WriteRawRC ( CommandReg, 0x0f );while ( ReadRawRC ( CommandReg ) & 0x10 );delay_us ( 1 );WriteRawRC ( ModeReg, 0x3D ); //定义发送和接收常用模式 和Mifare卡通讯,CRC初始值0x6363WriteRawRC ( TReloadRegL, 30 ); //16位定时器低位WriteRawRC ( TReloadRegH, 0 ); //16位定时器高位WriteRawRC ( TModeReg, 0x8D ); //定义内部定时器的设置WriteRawRC ( TPrescalerReg, 0x3E ); //设置定时器分频系数WriteRawRC ( TxAutoReg, 0x40 ); //调制发送信号为100%ASK
}/** 函数名:M500PcdConfigISOType* 描述 :设置RC522的工作方式* 输入 :ucType,工作方式* 返回 : 无* 调用 :外部调用*/
void M500PcdConfigISOType ( u8 ucType )
{if ( ucType == 'A') //ISO14443_A{ClearBitMask ( Status2Reg, 0x08 );WriteRawRC ( ModeReg, 0x3D );//3FWriteRawRC ( RxSelReg, 0x86 );//84WriteRawRC( RFCfgReg, 0x7F ); //4FWriteRawRC( TReloadRegL, 30 );//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)WriteRawRC ( TReloadRegH, 0 );WriteRawRC ( TModeReg, 0x8D );WriteRawRC ( TPrescalerReg, 0x3E );delay_us ( 2 );PcdAntennaOn ();//开天线}
}/** 函数名:PcdComMF522* 描述 :通过RC522和ISO14443卡通讯* 输入 :ucCommand,RC522命令字* pInData,通过RC522发送到卡片的数据* ucInLenByte,发送数据的字节长度* pOutData,接收到的卡片返回数据* pOutLenBit,返回数据的位长度* 返回 : 状态值* = MI_OK,成功* 调用 :内部调用*/
char PcdComMF522 ( u8 ucCommand, u8 * pInData, u8 ucInLenByte, u8 * pOutData, u32 * pOutLenBit )
{char cStatus = MI_ERR;u8 ucIrqEn = 0x00;u8 ucWaitFor = 0x00;u8 ucLastBits;u8 ucN;u32 ul;switch ( ucCommand ){case PCD_AUTHENT: //Mifare认证ucIrqEn = 0x12; //允许错误中断请求ErrIEn 允许空闲中断IdleIEnucWaitFor = 0x10; //认证寻卡等待时候 查询空闲中断标志位break;case PCD_TRANSCEIVE: //接收发送 发送接收ucIrqEn = 0x77; //允许TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEnucWaitFor = 0x30; //寻卡等待时候 查询接收中断标志位与 空闲中断标志位break;default:break;}WriteRawRC ( ComIEnReg, ucIrqEn | 0x80 ); //IRqInv置位管脚IRQ与Status1Reg的IRq位的值相反ClearBitMask ( ComIrqReg, 0x80 ); //Set1该位清零时,CommIRqReg的屏蔽位清零WriteRawRC ( CommandReg, PCD_IDLE ); //写空闲命令SetBitMask ( FIFOLevelReg, 0x80 ); //置位FlushBuffer清除内部FIFO的读和写指针以及ErrReg的BufferOvfl标志位被清除for ( ul = 0; ul < ucInLenByte; ul ++ )WriteRawRC ( FIFODataReg, pInData [ ul ] ); //写数据进FIFOdataWriteRawRC ( CommandReg, ucCommand ); //写命令if ( ucCommand == PCD_TRANSCEIVE )SetBitMask(BitFramingReg,0x80); //StartSend置位启动数据发送 该位与收发命令使用时才有效ul = 1000;//根据时钟频率调整,操作M1卡最大等待时间25msdo //认证 与寻卡等待时间{ucN = ReadRawRC ( ComIrqReg ); //查询事件中断ul --;} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) ); //退出条件i=0,定时器中断,与写空闲命令ClearBitMask ( BitFramingReg, 0x80 ); //清理允许StartSend位if ( ul != 0 ){if ( ! (( ReadRawRC ( ErrorReg ) & 0x1B )) ) //读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr{cStatus = MI_OK;if ( ucN & ucIrqEn & 0x01 ) //是否发生定时器中断cStatus = MI_NOTAGERR;if ( ucCommand == PCD_TRANSCEIVE ){ucN = ReadRawRC ( FIFOLevelReg ); //读FIFO中保存的字节数ucLastBits = ReadRawRC ( ControlReg ) & 0x07; //最后接收到得字节的有效位数if ( ucLastBits )* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits; //N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数else* pOutLenBit = ucN * 8; //最后接收到的字节整个字节有效if ( ucN == 0 )ucN = 1;if ( ucN > MAXRLEN )ucN = MAXRLEN;for ( ul = 0; ul < ucN; ul ++ )pOutData [ ul ] = ReadRawRC ( FIFODataReg );}}elsecStatus = MI_ERR;
// printf(ErrorReg);}SetBitMask ( ControlReg, 0x80 ); // stop timer nowWriteRawRC ( CommandReg, PCD_IDLE );return cStatus;
}/** 函数名:PcdRequest* 描述 :寻卡* 输入 :ucReq_code,寻卡方式* = 0x52,寻感应区内所有符合14443A标准的卡* = 0x26,寻未进入休眠状态的卡* pTagType,卡片类型代码* = 0x4400,Mifare_UltraLight* = 0x0400,Mifare_One(S50)* = 0x0200,Mifare_One(S70)* = 0x0800,Mifare_Pro(X))* = 0x4403,Mifare_DESFire* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdRequest ( u8 ucReq_code, u8 * pTagType )
{char cStatus;u8 ucComMF522Buf [ MAXRLEN ];u32 ulLen;ClearBitMask ( Status2Reg, 0x08 ); //清理指示MIFARECyptol单元接通以及所有卡的数据通信被加密的情况WriteRawRC ( BitFramingReg, 0x07 ); // 发送的最后一个字节的 七位SetBitMask ( TxControlReg, 0x03 ); //TX1,TX2管脚的输出信号传递经发送调制的13.56的能量载波信号ucComMF522Buf [ 0 ] = ucReq_code; //存入 卡片命令字cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 1, ucComMF522Buf, & ulLen ); //寻卡if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //寻卡成功返回卡类型{* pTagType = ucComMF522Buf [ 0 ];* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];}elsecStatus = MI_ERR;return cStatus;
}/** 函数名:PcdAnticoll* 描述 :防冲撞* 输入 :pSnr,卡片序列号,4字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdAnticoll ( u8 * pSnr )
{char cStatus;u8 uc, ucSnr_check = 0;u8 ucComMF522Buf [ MAXRLEN ];u32 ulLen;ClearBitMask ( Status2Reg, 0x08 ); //清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位WriteRawRC ( BitFramingReg, 0x00); //清理寄存器 停止收发ClearBitMask ( CollReg, 0x80 ); //清ValuesAfterColl所有接收的位在冲突后被清除/*参考ISO14443协议:https://blog.csdn.net/wowocpp/article/details/79910800PCD 发送 SEL = ‘93’,NVB = ‘20’两个字节迫使所有的在场的PICC发回完整的UID CLn作为应答。*/ucComMF522Buf [ 0 ] = 0x93; //卡片防冲突命令ucComMF522Buf [ 1 ] = 0x20;// 发送并接收数据 接收的数据存储于ucComMF522BufcStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 2, ucComMF522Buf, & ulLen);//与卡片通信if ( cStatus == MI_OK) //通信成功{// 收到的UID 存入pSnrfor ( uc = 0; uc < 4; uc ++ ){* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //读出UIDucSnr_check ^= ucComMF522Buf [ uc ];}if ( ucSnr_check != ucComMF522Buf [ uc ] )cStatus = MI_ERR;}SetBitMask ( CollReg, 0x80 );return cStatus;
}/** 函数名:CalulateCRC* 描述 :用RC522计算CRC16* 输入 :pIndata,计算CRC16的数组* ucLen,计算CRC16的数组字节长度* pOutData,存放计算结果存放的首地址* 返回 : 无* 调用 :内部调用*/
void CalulateCRC ( u8 * pIndata, u8 ucLen, u8 * pOutData )
{u8 uc, ucN;ClearBitMask(DivIrqReg, 0x04);WriteRawRC(CommandReg, PCD_IDLE);SetBitMask(FIFOLevelReg, 0x80);for ( uc = 0; uc < ucLen; uc ++)WriteRawRC ( FIFODataReg, * ( pIndata + uc ) );WriteRawRC ( CommandReg, PCD_CALCCRC );uc = 0xFF;do{ucN = ReadRawRC ( DivIrqReg );uc --;} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );pOutData [ 0 ] = ReadRawRC ( CRCResultRegL );pOutData [ 1 ] = ReadRawRC ( CRCResultRegM );
}/** 函数名:PcdSelect* 描述 :选定卡片* 输入 :pSnr,卡片序列号,4字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdSelect ( u8 * pSnr )
{char cStatus;u8 uc;u8 ucComMF522Buf [ MAXRLEN ];u32 ulLen;// 防冲撞 0x93ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;// 假设没有冲突,PCD 指定NVB为70,此值表示PCD将发送完整的UID CLn,与40位UID CLn 匹配的PICC,以SAK作为应答ucComMF522Buf [ 1 ] = 0x70;ucComMF522Buf [ 6 ] = 0;// 3 4 5 6位存放UID,第7位一直异或。。。for ( uc = 0; uc < 4; uc ++ ){ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );}// CRC(循环冗余校验)CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );ClearBitMask ( Status2Reg, 0x08 );// 发送并接收数据cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 9, ucComMF522Buf, & ulLen );if ( ( cStatus == MI_OK ) && ( ulLen == 0x18 ) )cStatus = MI_OK;elsecStatus = MI_ERR;return cStatus;
}/** 函数名:PcdAuthState* 描述 :验证卡片密码* 输入 :ucAuth_mode,密码验证模式* = 0x60,验证A密钥* = 0x61,验证B密钥* u8 ucAddr,块地址* pKey,密码* pSnr,卡片序列号,4字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr )
{char cStatus;u8 uc, ucComMF522Buf [ MAXRLEN ];u32 ulLen;ucComMF522Buf [ 0 ] = ucAuth_mode;ucComMF522Buf [ 1 ] = ucAddr;for ( uc = 0; uc < 6; uc ++ )ucComMF522Buf [ uc + 2 ] = * ( pKey + uc );for ( uc = 0; uc < 6; uc ++ )ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc );// printf("char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr )\r\n");// printf("before PcdComMF522() ucComMF522Buf:%s\r\n", ucComMF522Buf);// 验证密钥命令cStatus = PcdComMF522 ( PCD_AUTHENT, ucComMF522Buf, 12, ucComMF522Buf, & ulLen );// printf("after PcdComMF522() ucComMF522Buf:%s\r\n", ucComMF522Buf);if ( ( cStatus != MI_OK ) || ( ! ( ReadRawRC ( Status2Reg ) & 0x08 ) ) ){
// if(cStatus != MI_OK)
// printf("666") ;
// else
// printf("888");cStatus = MI_ERR;}return cStatus;
}/** 函数名:PcdWrite* 描述 :写数据到M1卡一块* 输入 :u8 ucAddr,块地址* pData,写入的数据,16字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdWrite ( u8 ucAddr, u8 * pData )
{char cStatus;u8 uc, ucComMF522Buf [ MAXRLEN ];u32 ulLen;ucComMF522Buf [ 0 ] = PICC_WRITE;ucComMF522Buf [ 1 ] = ucAddr;CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )cStatus = MI_ERR;if ( cStatus == MI_OK ){memcpy(ucComMF522Buf, pData, 16);for ( uc = 0; uc < 16; uc ++ )ucComMF522Buf [ uc ] = * ( pData + uc );CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 18, ucComMF522Buf, & ulLen );if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )cStatus = MI_ERR;}return cStatus;
}/** 函数名:PcdRead* 描述 :读取M1卡一块数据* 输入 :u8 ucAddr,块地址* pData,读出的数据,16字节* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdRead ( u8 ucAddr, u8 * pData )
{char cStatus;u8 uc, ucComMF522Buf [ MAXRLEN ];u32 ulLen;ucComMF522Buf [ 0 ] = PICC_READ;ucComMF522Buf [ 1 ] = ucAddr;CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) ){for ( uc = 0; uc < 16; uc ++ )* ( pData + uc ) = ucComMF522Buf [ uc ];}elsecStatus = MI_ERR;return cStatus;
}/** 函数名:PcdHalt* 描述 :命令卡片进入休眠状态* 输入 :无* 返回 : 状态值* = MI_OK,成功* 调用 :外部调用*/
char PcdHalt( void )
{u8 ucComMF522Buf [ MAXRLEN ];u32 ulLen;ucComMF522Buf [ 0 ] = PICC_HALT;ucComMF522Buf [ 1 ] = 0;CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );return MI_OK;
}void IC_CMT ( u8 * UID, u8 * KEY, u8 RW, u8 * Dat )
{u8 ucArray_ID [ 4 ] = { 0 };//先后存放IC卡的类型和UID(IC卡序列号)PcdRequest ( 0x52, ucArray_ID );//寻卡PcdAnticoll ( ucArray_ID );//防冲撞PcdSelect ( UID );//选定卡PcdAuthState ( 0x60, 0x10, KEY, UID );//校验if ( RW )//读写选择,1是读,0是写PcdRead ( 0x10, Dat );elsePcdWrite ( 0x10, Dat );PcdHalt ();
}// 显示卡的卡号,以十六进制显示
void ShowID(u8 *p)
{u8 num[9];u8 i;for(i=0; i<4; i++){num[i*2] = p[i] / 16;num[i*2] > 9 ? (num[i*2] += '7') : (num[i*2] += '0');num[i*2+1] = p[i] % 16;num[i*2+1] > 9 ? (num[i*2+1] += '7') : (num[i*2+1] += '0');}num[8] = 0;printf("ID>>>%s\r\n", num);
}额外资料