一.写在前面
硬件配置:
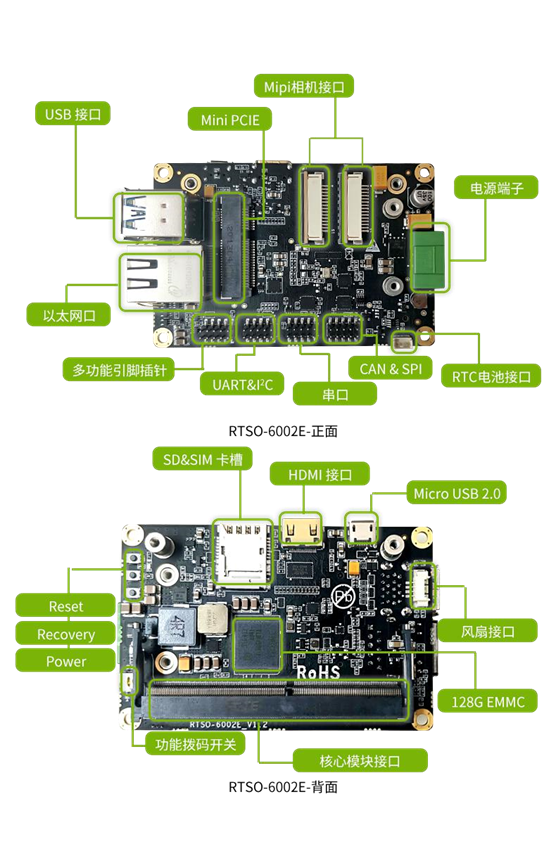
Jeston xavier NX 机载电脑,板载6002E 设备如图:
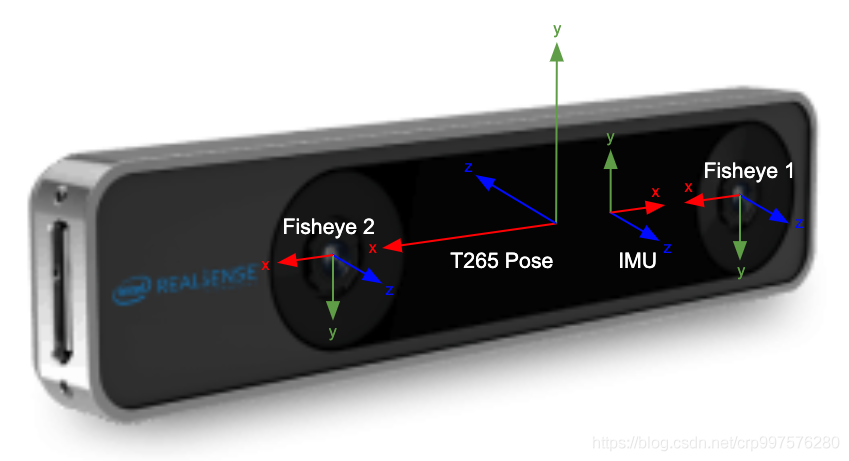
T265双目摄像头
二.Realsense SDK和Realsense-ros的介绍
在我看来,Realsense SDK是我们使用T265所需的驱动,如我们打开官方软件去观看位姿和双目。Realsense-ros则是我们将T265与ros配合使用的必要驱动。
同时我们需要注意的是Realsense SDK(librealsense)和Realsense-ros之间是有版本要求的,如果版本不对应,使用T265是存在问题,如运行相关例程是显示没有插上T265。
如何查看Realsense SDK(librealsense)和Realsense-ros两者之间的对应版本:
https://github.com/IntelRealSense/realsense-ros/releases
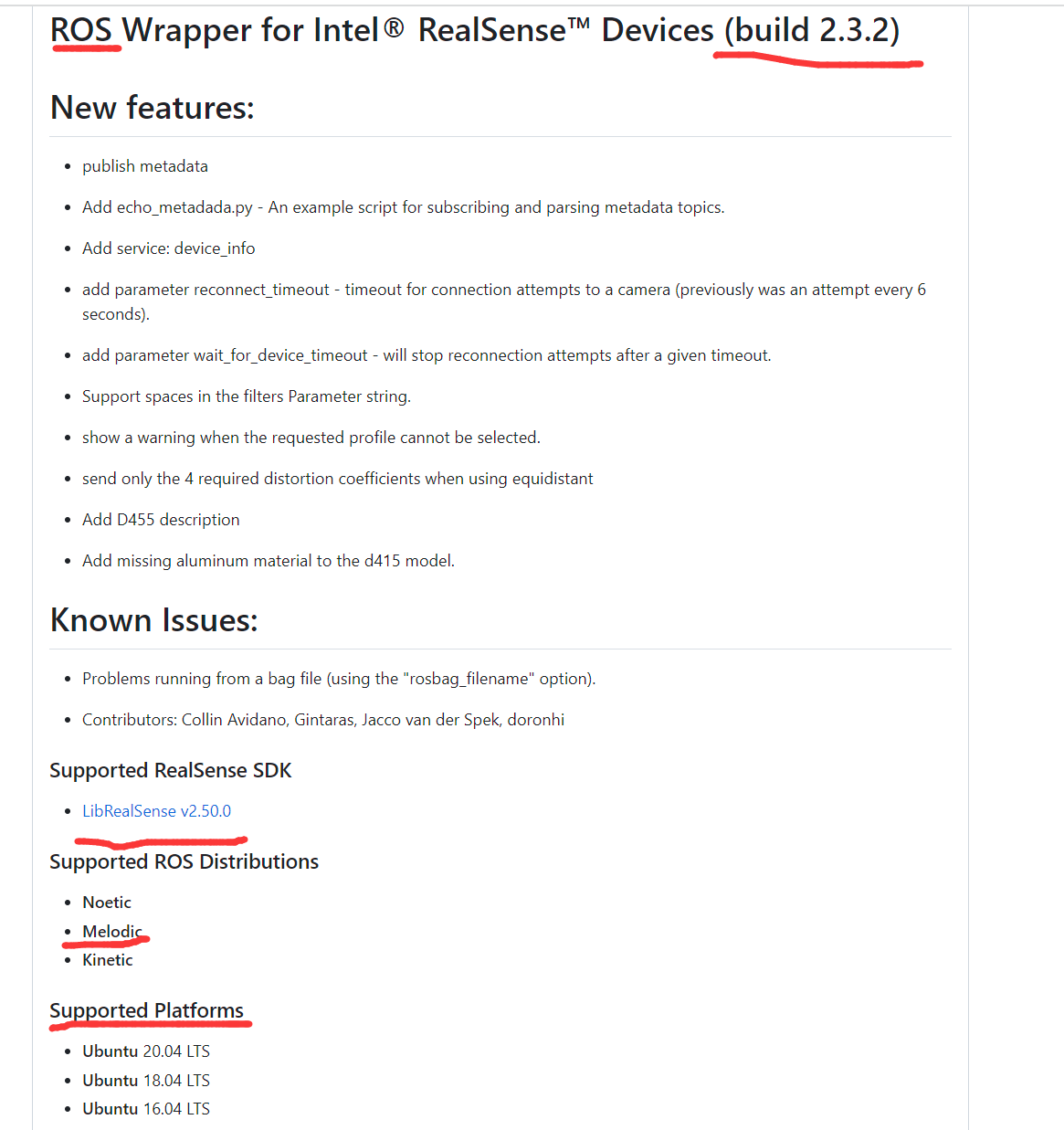
第一行适配ros1版本,同时realsense-ros版本为2.3.2;支持的realsense-sdk版本为2.50.0;支持的
ros1版本有Noetic、Melodic、Kinetic。
接下来我会把我安装时碰到的弯路。尽量都复现出来,让大家少走弯路,有更多时间找女朋友。
三.Realsense SDK安装
!注意安装时不要插上T265
#注册公钥(这么长是因为中间有个或,刚开始可能会不成功,多试几次即可)
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
# 安装依赖项
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
#先试着这个,注意ros 的对应版本
sudo apt-get install ros-melodic-realsense2-camera
sudo apt install ros-melodic-cv-bridge ros-melodic-image-transport ros-melodic-tf ros-melodic-diagnostic-updater ros-melodic-ddynamic-reconfigure
sudo apt install ros-noetic-cv-bridge ros-noetic-image-transport ros-noetic-tf ros-noetic-diagnostic-updater ros-noetic-ddynamic-reconfigure
#下载librealsense
git clone -b v2.50.0 https://github.com/IntelRealSense/IntelRealSense/librealsense如果网速不行,可以使用下边的代理
git clone -b v2.50.0 https://ghproxy.com/https://github.com/
IntelRealSense/librealsensecd librealsense# 安装位于 librealsense 源目录中的 Intel Realsense 权限脚本
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
# 编译
mkdir build && cd build
#注意复制的时候不要带有空格 (下面这两行是一段命令)
cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true \
-DFORCE_RSUSB_BACKEND=ON -DBUILD_WITH_TM2=false -DIMPORT_DEPTH_CAM_FW=falsesudo make uninstall && make cleanmake -j6 #6表示同时进行6个任务,一般不超过cpu核数,也可直接make(时间较长)
sudo make install# 连接T265,测试是否安装成功
realsense-viewer
#进入~/librealsense/build/examples/pose路径下打开终端
#运行命令:
./rs-pose
#终端上会不断打印出当前相机相对于初始位置的X、Y、Z三轴坐标值四.realsense-ros 的安装
cd ~/catkin_ws/src/
#这步没加版本号,我加以后找不到对应的版本,默认下载的realsense-ros刚好适配sdk,因为他没有更新ros1的realsense-ros
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
sudo gedit ~/.bashrc
#添加下面两行命令
source ~/catkin_gps/devel/setup.bash
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/catkin_gps/
#启动测试demo,即可看到T265的位姿数据
roslaunch realsense2_camera demo_t265.launch 注意:catkin_make 这步命令如果错了,可能是编译的地点错误,进入上一级目录,realsense-ros下编译
五.安装过程中的错误
1.错误CMake Error at /opt/ros/melodic/share/catkin/cmake/catkin_workspace.cmake:100 (message):
This workspace contains non-catkin packages in it, and catkin cannot build
a non-homogeneous workspace without isolation. Try the
'catkin_make_isolated' command instead.
Call Stack (most recent call first):
CMakeLists.txt:69 (catkin_workspace)
解决办法删除.packge.xml
2.CMake Error: The following variables are used in this project, but they are set to NOTFOUND.
解决办法:https://blog.csdn.net/Will_Ye/article/details/123800851
Cmake --version 3.2.1 (ros 安装时会自带cmake(ros-melodic 下载时附带的cmake版本3.10),我们在编译px4会因为cmake的版本错误报错)
千万注意不要着急升级cmake ,如果你的命令有sudo make uninstall ,那样会卸载cmake。所以安装好ros1后正常安装T265,再编译PX4的时候再进行升级
3.wstool下载
解决办法:在我们安装mavros时,会碰到wstool,通过
sudo apt-get install python-wstool
或者 sudo pip install -U wstool 下载
https://blog.csdn.net/weixin_44145300/article/details/87966943
4. ERROR: your rosdep installation has not been initialized yet. Please run:rosdep update
rosdep init
Rosdep update 失败的解决办法
解决办法:https://zhuanlan.zhihu.com/p/546426618
这里再次感谢小鱼,放一下鱼哥的网址
https://fishros.org.cn/forum/topic/20/%E5%B0%8F%E9%B1%BC%E7%9A%84%E4%B8%80%E9%94%AE%E5%AE%89%E8%A3%85%E7%B3%BB%E5%88%97?lang=zh-CN
5.Ubuntu 复制和移动文件命令
解决办法:https://jiuaidu.com/jianzhan/892439/
Ubuntu删除文件命令
https://www.lsjlt.com/news/111824.html
6.
Wget
https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh无法连接的问题
https://raw.githubusercontent.com/无法连接
解决办法:
# 编辑hosts文件
sudo gedit /etc/hosts
# 在hosts中修改或添加下面内容
185.199.110.133 raw.githubusercontent.com
查询网址ip
https://site.ip138.com/raw.githubusercontent.com/ (专用于查询网址ip)

我原本以为选个中国的,结果根本不好用,选第一个就行,不行多试几个,反正电信那个就是下不了
7.bash: rosinstall_generator: command not found.
解决:sudo apt-get install rosinstall_generator
8.Mavros catkin_build 出错
两个办法
解除系统限制
https://blog.csdn.net/cau_weiyuhu/article/details/128167041
我改过后还是那样,open files没有变化,那么可以用第二个方法,不要盲目的以为是自己的内存问题,很可能是系统的限制
减少运算核数
Catkin_build -j2
9.PX4固件下载地址
https://github.com/PX4/PX4-Autopilot/releases



