大疆无人机安卓Mobile Sdk开发(一)简单介绍
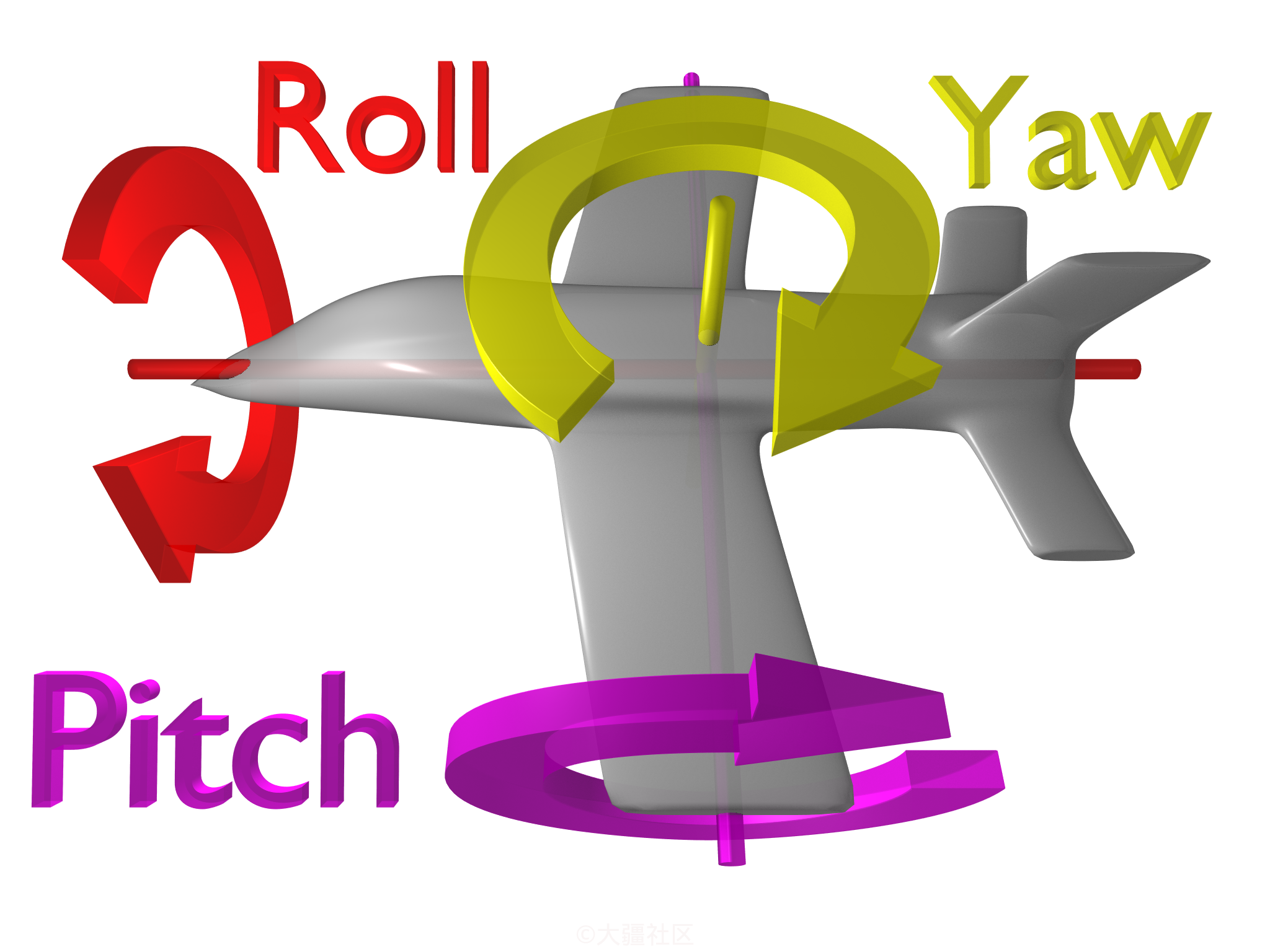
很多人对yaw,roll,和picth的含义不是很懂,下面用大疆官方的一张图给大家解释一下,一目了然
pitch是俯仰,roll是横滚,yaw是航向,按照图中箭头所代表的空间旋转一下飞机就能理解了。
大疆无人机安卓Mobile Sdk开发(一)简单介绍
很多人对yaw,roll,和picth的含义不是很懂,下面用大疆官方的一张图给大家解释一下,一目了然
pitch是俯仰,roll是横滚,yaw是航向,按照图中箭头所代表的空间旋转一下飞机就能理解了。