首页
编程日记
开发工具
嵌入式
服务器
运维
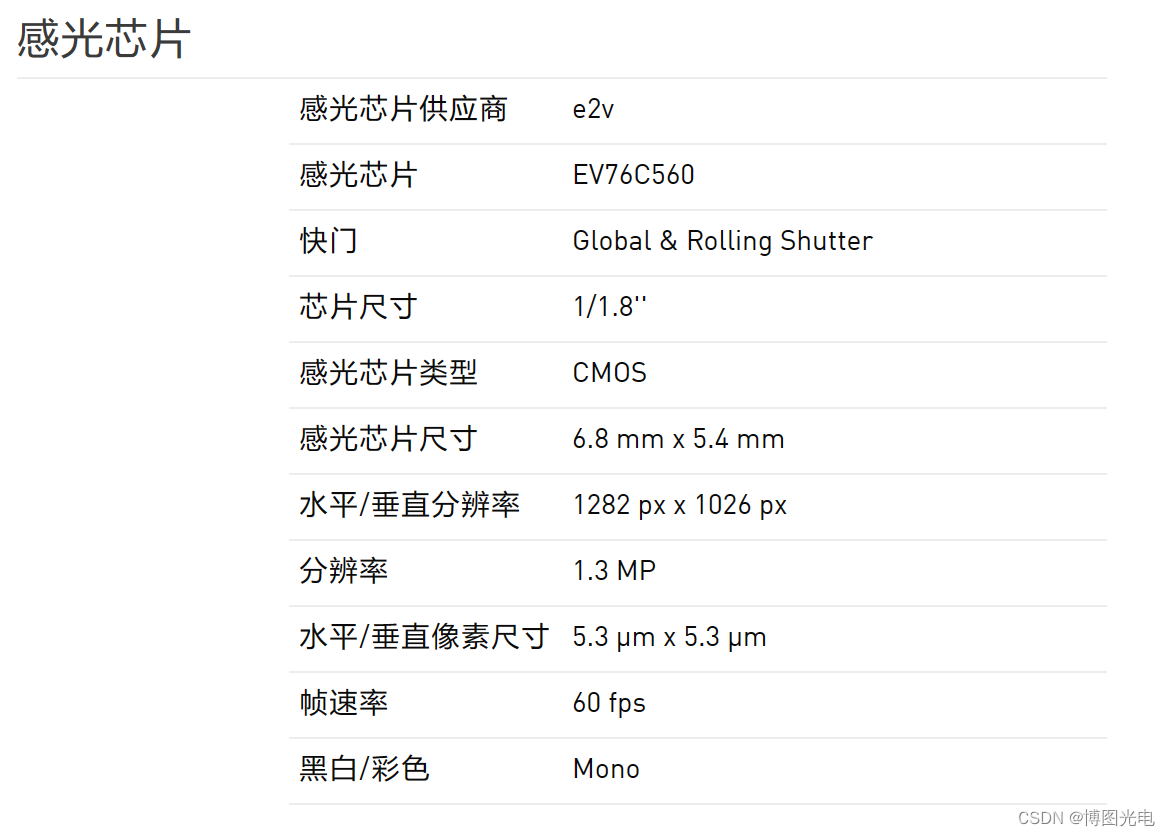
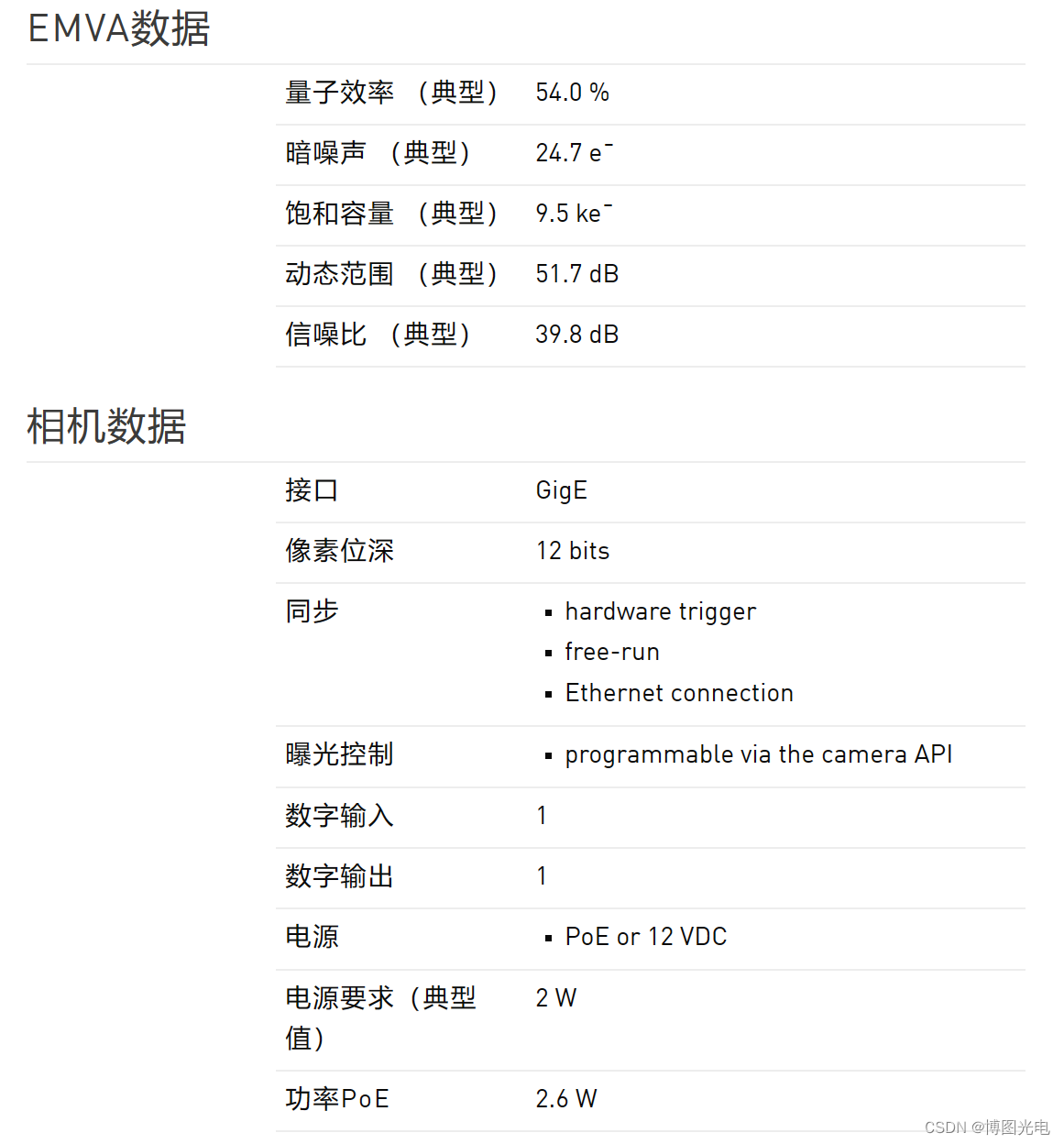
巴斯勒相机acA1300-60gm
news
/
2024/11/27 20:28:05
/
Basler acA1300-60gm GigE 相机配有 e2v EV76C560 CMOS 感光芯片,每秒 60 帧图像,130 万像素分辨率。
http://www.ppmy.cn/news/470645.html
相关文章
雷达imu联合标定lidar_imu_calib-main
1.将文件夹解压后安装在catkin_ws/src下 mkdir -p catkin_ws/src cd catkin_ws/src git clone https://github.com/chennuo0125-HIT/lidar_imu_calib.git cd .. catkin_make -DCATKIN_WHITELIST_PACKAGES"ndt_omp;lidar_imu_calib"2.报错:/usr/include…
阅读更多...
4D成像毫米波雷达按下“加速键”
汽车毫米波雷达正在迎来大规模新旧技术替代周期。和高算力芯片、激光雷达、800万像素摄像头一样,时代抛弃你,只是时间问题。 作为业界首款专用16nm成像雷达处理器,恩智浦宣布S32R45已经投入量产,并将于2022年上半年开始首次用于客…
阅读更多...
激光雷达SLAM取经之旅1(Ubuntu20.04-ROS-Noetic安装无坑版)
本人研究生学习方向为激光雷达SLAM,但是实验室目前没人做这一块,所以一切只能靠自己摸索,好在老师大方,需要的设备都愿意买,提高了我学习激光雷达SLAM这方面的兴趣。 原本是打算以Windows平台学习激光雷达SLAM的&#…
阅读更多...
ROS——树莓派4B使用思岚A1激光雷达和乐视深度相机
文章目录 软硬件环境硬件软件 1.运行并测试RPLIDAR A1激光雷达使用教程测试效果 2.使用RPLIDAR A1激光雷达测试hector_mapping使用教程报错解决测试效果 3.测试乐视深度相机使用教程报错解决测试效果RGB图像深度图像 务必使用远程桌面进行launch文件的运行,因为会需…
阅读更多...
ubuntu20 autoware+carla联合仿真(一)通过激光雷达制作点云地图
autowarecarlacarla ros bridge联合仿真 序言环境要求闲聊致谢 rosbag构建点云地图1. 打开carla1.打开carla服务端2.打开 carla ros bridge3.检查rostopic【重要】3.检查激光雷达信息 2. 打开autoware3.开启信息转发3.1 开启信息转发3.2 检查信息转发效果方法一:终端…
阅读更多...
3、速腾16线激光雷达RS-16 ----- 3D建图算法LeGO-LOAM的使用(Ubuntu18.04 + ROS Melodic)
Ubuntu18.04使用速腾16线激光雷达RS-16测试3D建图算法 LeGO-LOAM 的使用 1. 安装gtsam因子图库2. 新建ROS工程目录文件夹,下载源码进行编译3. 下载相关数据集进行测试4. 使用速腾16线激光雷达RS-16进行实时建图4.1 下载rslidar_sdk4.2 雷达驱动环境安装4.3 修改 CMa…
阅读更多...
Cartographer(3)lidar+IMU建图
目录 一、准备工作 二、IMU-SRC 使用 / 信息确认 目录 一、准备工作 二、IMU-SRC 使用 / 信息确认 2.1 首先从官网/Github/Ros-wiki 中找到自己IMU所对应的SRC 2.2 下载后需查看的信息 2.3 编译与使用 三、Lidar与IMU接入cartographer算法 3.1 确认 Lidar 与 IMU 的 top…
阅读更多...
激光雷达初体验 - Ubuntu 18.04 + 思岚科技 RPLIDAR A1M8 + hector_slam 建图
思岚科技 RPLIDAR A1M8 hector_slam 建图 一、环境配置和基础测试二、hector_slam 安装三、launch 文件编写四、运行建图节点五、小结 一、环境配置和基础测试 见上一篇博文 :激光雷达初体验 - Ubuntu 18.04 思岚科技 RPLIDAR A1M8 ROS 上手使用 二、hector_sl…
阅读更多...
最新文章
学习笔记032——Spring学习笔记
Springboot下导入导出excel
想自学成黑客(白帽子),零基础小白如何自学黑客(网络安全)?
Unity图形学之BRDF双向反射分布函数
算法新篇章:AI如何在数学领域超越人类
C++网络编程:select IO多路复用及TCP服务器开发