大疆激光雷达Livox Avia
箱子

 从左至右为:大疆激光雷达Livox Avia ,电源转接插座,内六角形L型扳手,镜头清洁布,螺钉包,说明书,1.5米航插电源网口线,同步信号线(三个引脚)及电源线(黑-负,红-正引脚)。
从左至右为:大疆激光雷达Livox Avia ,电源转接插座,内六角形L型扳手,镜头清洁布,螺钉包,说明书,1.5米航插电源网口线,同步信号线(三个引脚)及电源线(黑-负,红-正引脚)。
先阅读手册
激光雷达:905nm;水平角70.4度,垂直77.2度。反射率80%-320m;反射率10%-190m
 前往官网下载最新的Livox Viewer以及相关的手册和软件-www.livoxtech.com
前往官网下载最新的Livox Viewer以及相关的手册和软件-www.livoxtech.com
阅读Livox Viewer
需要ubuntu 16.04/18.04。
如将 PC 与 Livox 设备直连,则需要将 PC的 IP 类型设置为静态 IP,IP 地址为 192.168.1.2,子网掩码为 255.255.255.0,默认网关为 192.168.1.1。
Ubuntu 用户:下载并解压文件,启动终端并进入解压缩后文件夹的根目录,运行指令:./livox_viewer.sh 即可启动。
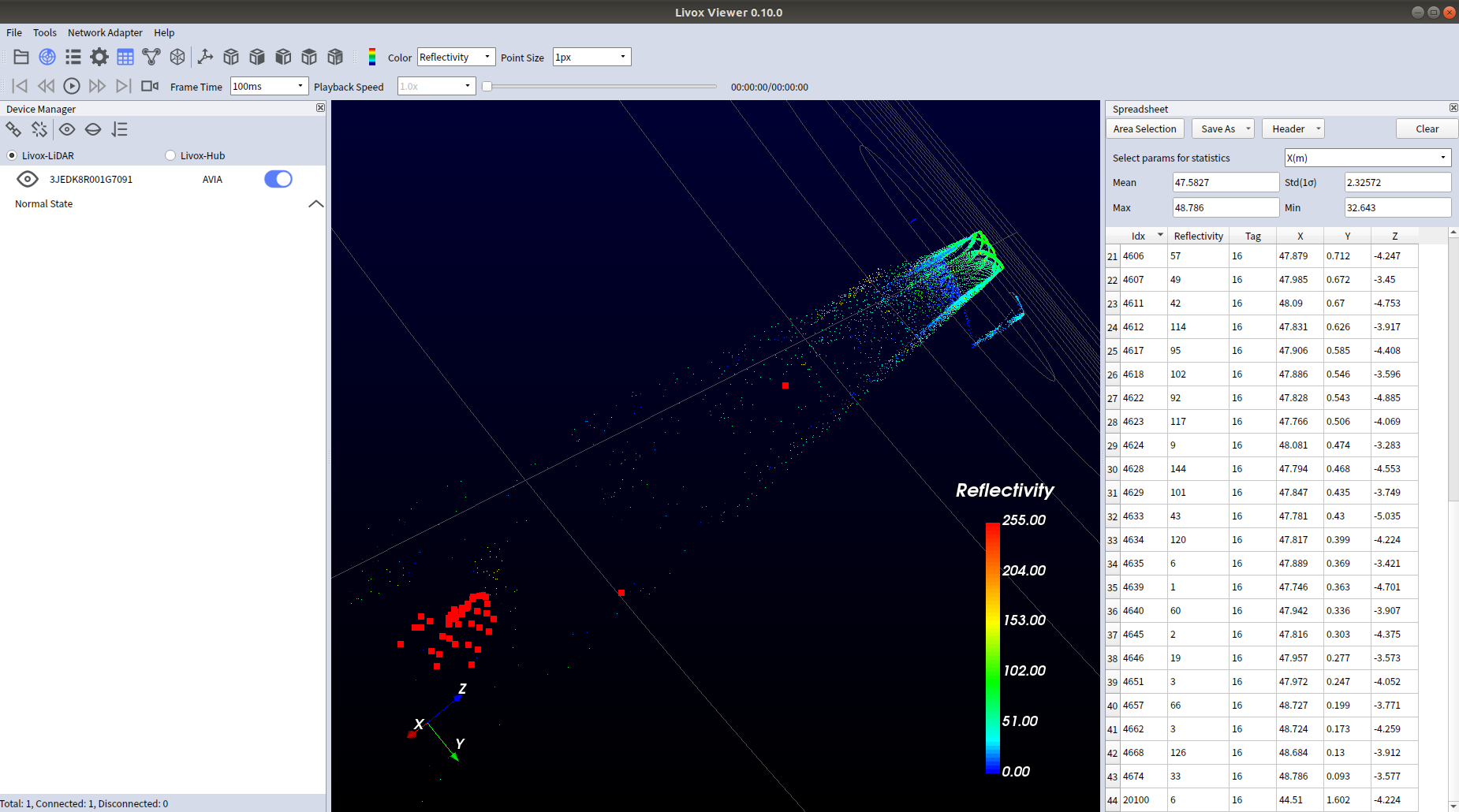
测试Livox Viewer
下载ros驱动
https://github.com/Livox-SDK/livox_ros_driver.git
按步骤编译
roslaunch livox_ros_driver livox_lidar_rviz.launch [param]
如果param参数为空,livox_ros_driver将根据配置文件中的配置连接到相应的设备。
连接规则如下当配置文件中指定的设备的连接状态配置为启用连接(true)时,livox_ros_driver将只连接到配置文件中指定的设备;
当配置文件中指定的设备连接状态全部配置为禁止连接(false)时,livox_ros_driver会自动连接所有扫描到的设备;
ROS驱动下的运行效果


所用系统
Ubuntu 18.04 ROS melodic