参考官方文档:realsense-ros
1.环境配置的版本
- Ubuntu18.04
- ROS Melodic
2.安装ROS
参考官方文档:ros安装
(我安装的是ubuntu18.04对应的 ROS Melodic版本)
3.安装 Realsense2_camera
(有两种方法,我用的是第二种:源代码安装)
-
首先安装 Realsense SDK
- 参考官方文档:realsense sdk安装
-
首先确保依赖包都安装了,查看 travis.yml 文件,里面有写需要安装的packages
-
创建一个catkin workspace
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
- clone代码到工作空间
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
- (一定要确保依赖包都安装了,不然后面catkin_make会失败)
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
- 环境路径配置
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
4.Realsense初体验(注意是usb3.0接口)
- 通过realsense-viewer

- 通过ros节点启动
roslaunch realsense2_camera rs_camera.launch
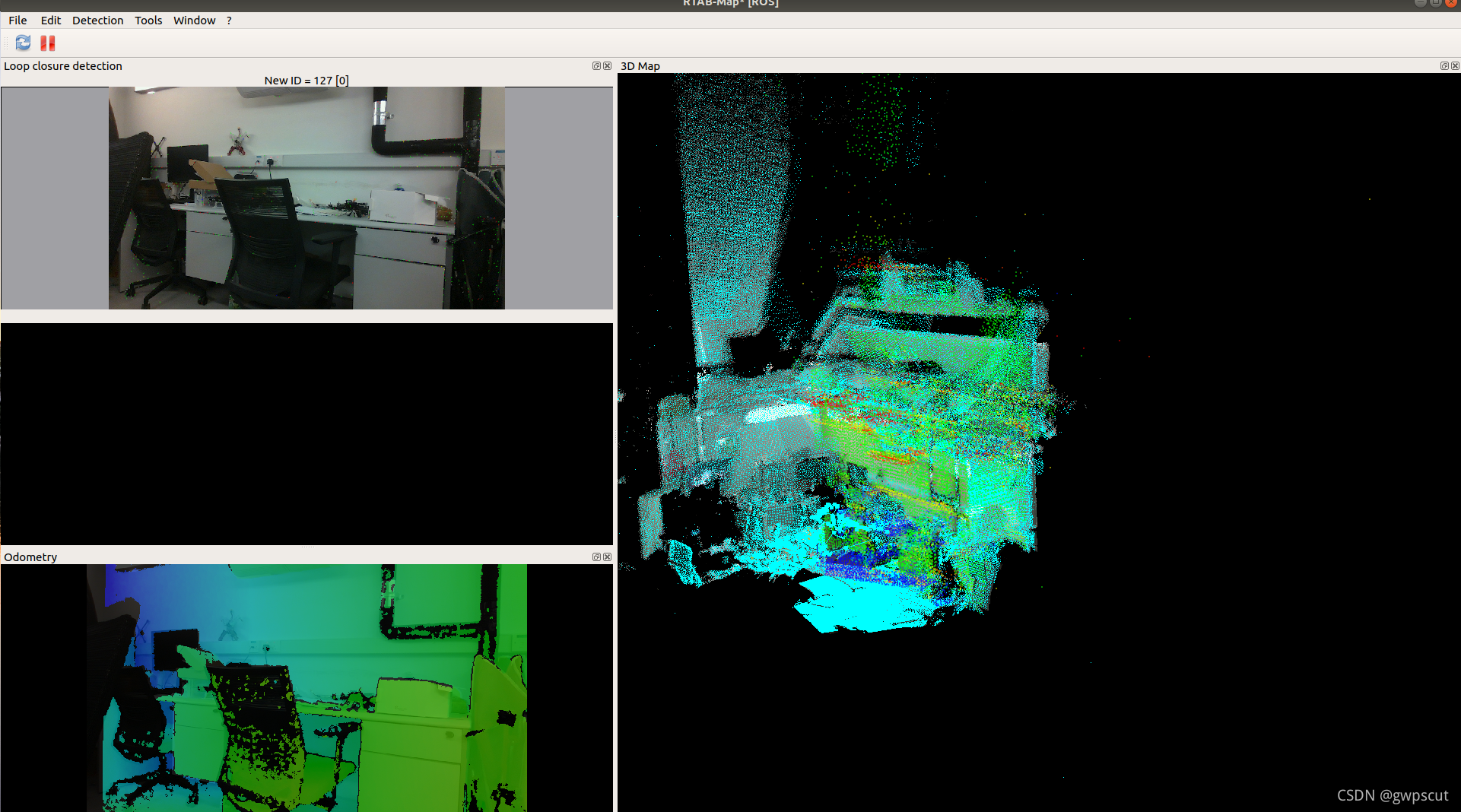
可以通过rviz可视化