雷达和相机的单独调试过程参照我之前发的笔记。
接着往下:
全程需要实物连接
首先,下载并启动标定工具箱
mkdir -p ~/CL_calibration_ws/src
git clone https://github.com/XidianLemon/calibration_camera_lidar.git
cd ..
catkin_make
source devel/setup.bash
rosrun calibration_camera_lidar calibration_toolkit启动成功会出现 如下提示框
新建终端,打开相机
cd camera_ws
catkin_make
source devel/setup.bash
roslaunch usb_cam usb_cam-test.launch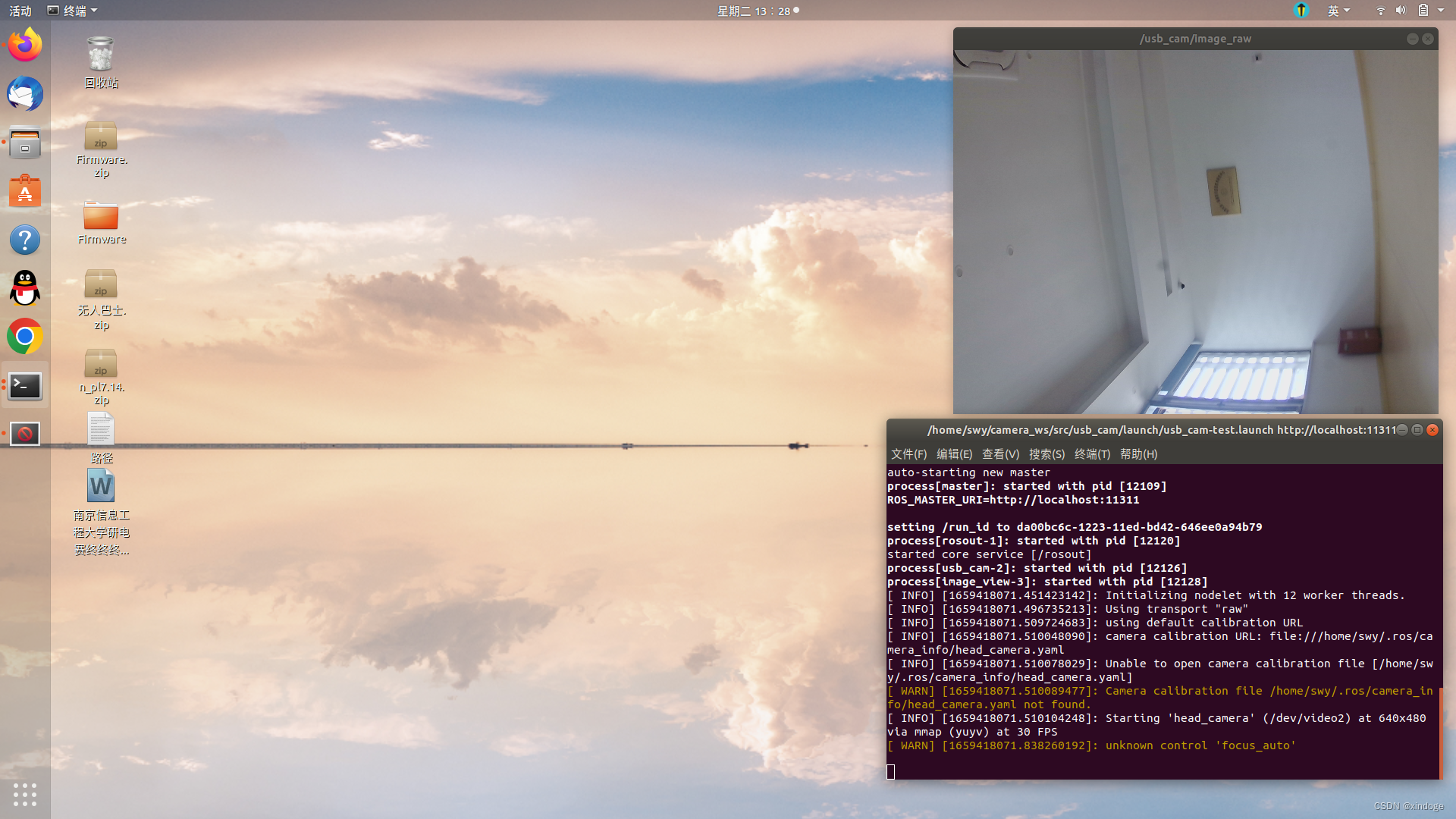
再建一个新终端,打开雷达
cd leishen_ws
catkin_make
source devel/setup.bash
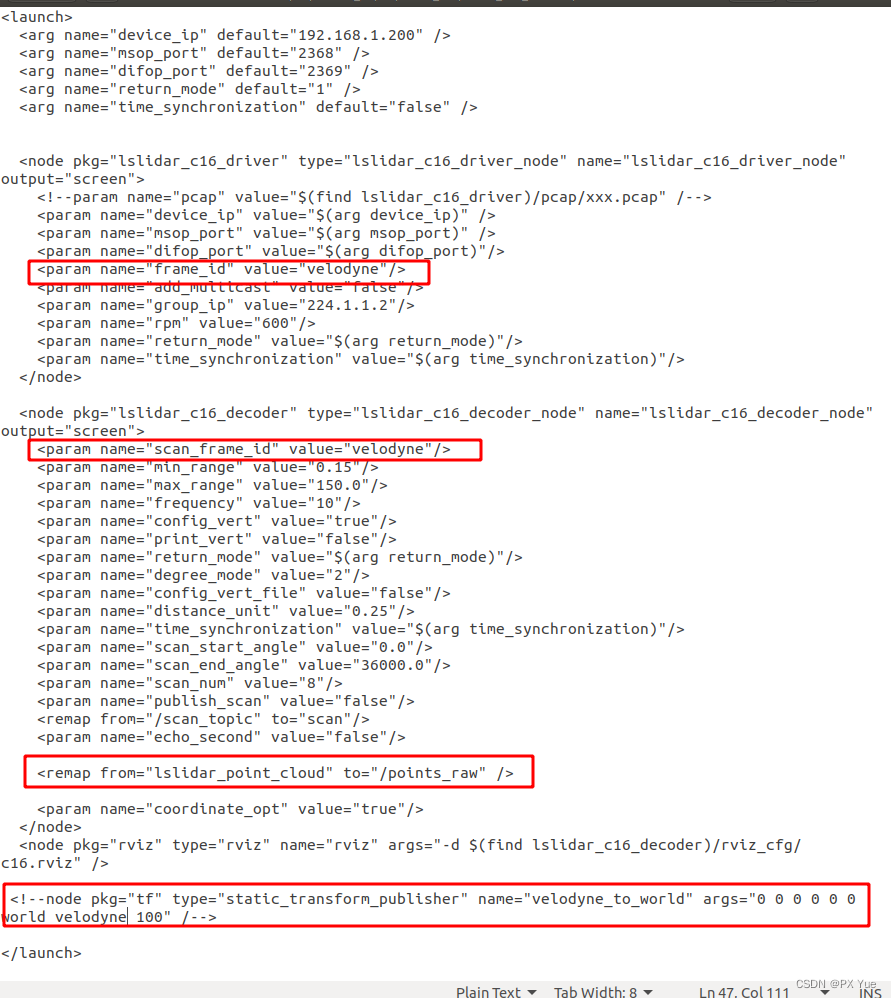
roslaunch lslidar_c16_decoder lslidar_c16.launch --screen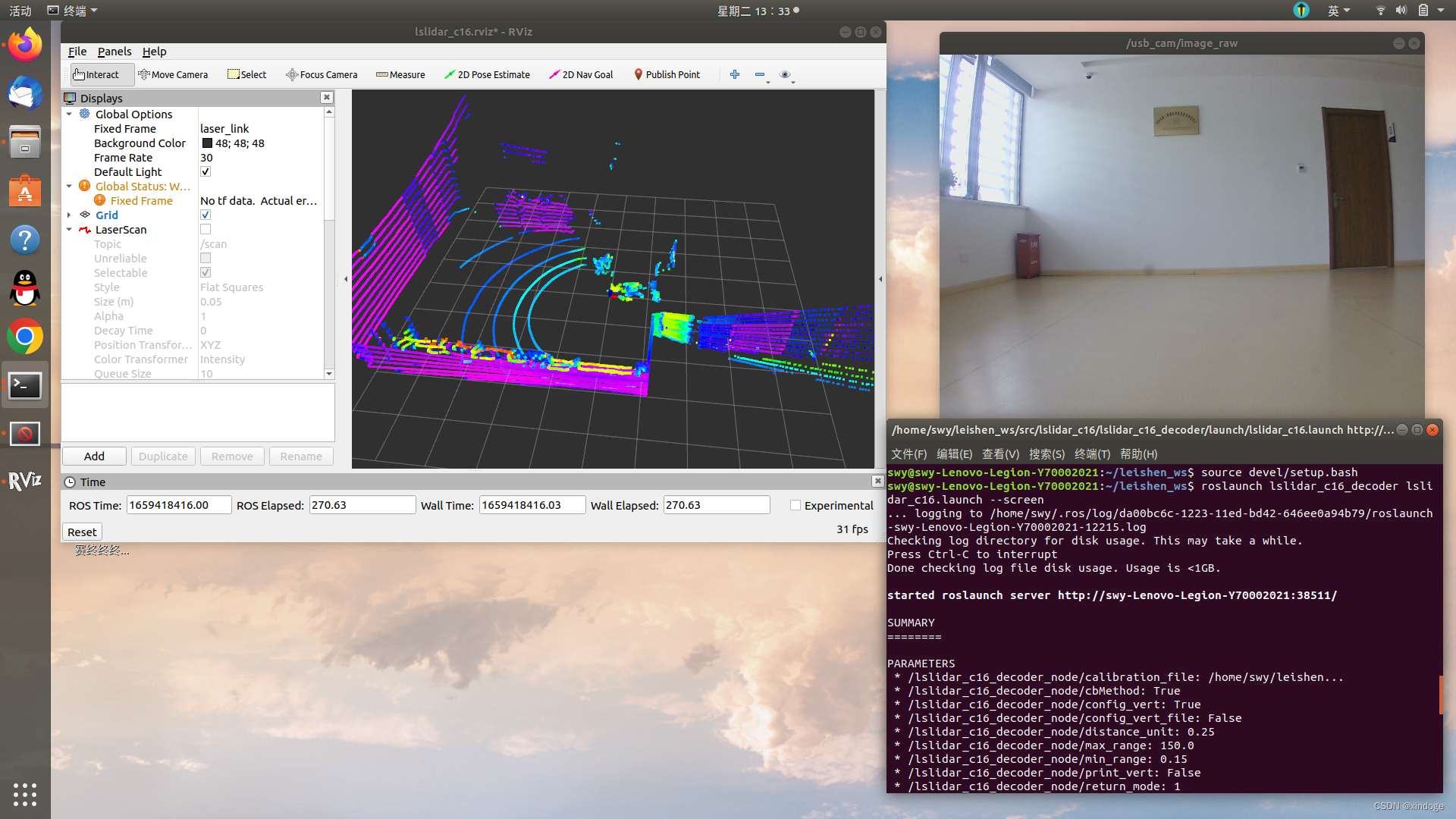
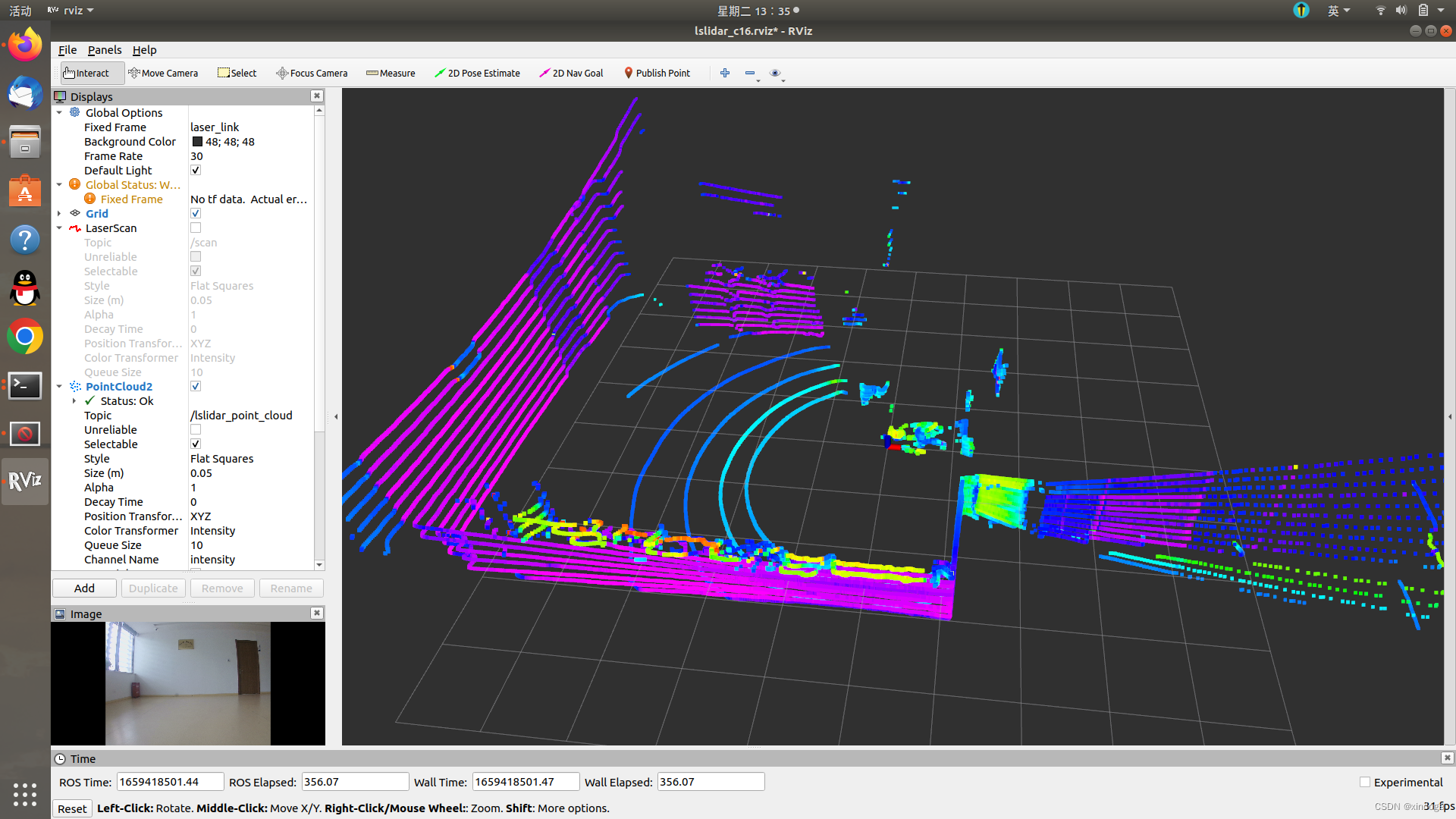
点击上图左下角Add按钮,在跳出的对话框中点击topic,下拉到底,选择image(一定要拉到底,有两个image,选择第二个),成功添加相机
开始录制,尽可能录制时间长一些。
rosrun record -a实验靓仔端着标定板站在雷达和相机前方,从左中右三个角度,分别正放、左倾右倾上倾下倾标定板。标定两组,距离雷达远一点和距离稍近。
回放录制的视频并打开标定工具包
rosbag play 2022-08-02-15-44-48.bag /lslidar_point_cloud:=/points_raw
rosrun calibration_camera_lidar calibration_toolkit
这里的2022-08-02-15-44-48.bag需要根据自己的命名修改,第二条命令后跳出的框中,点击下拉按钮,选择/usb_cam/image_raw,点击确定,下一个框继续选择Camera->velodyne,点击确定。
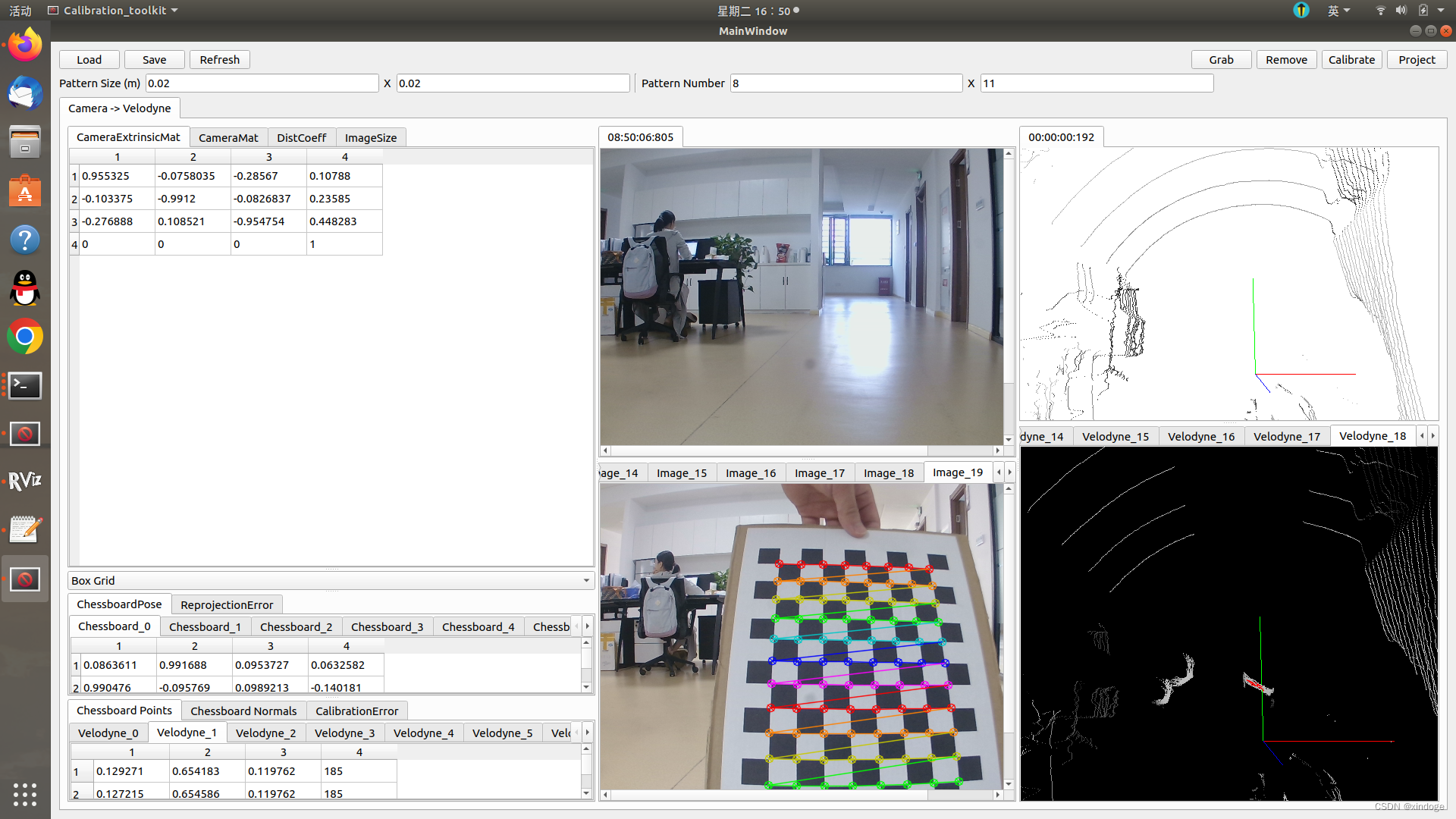
打开后,Pattern Size输入标定板边长,Pattern Number选择标定板(列数-1)X(行数-1)。点击黑色区域,按B键,修改颜色为白色,小键盘上下左右方向键和QWEASD调节点云位置和大小方向。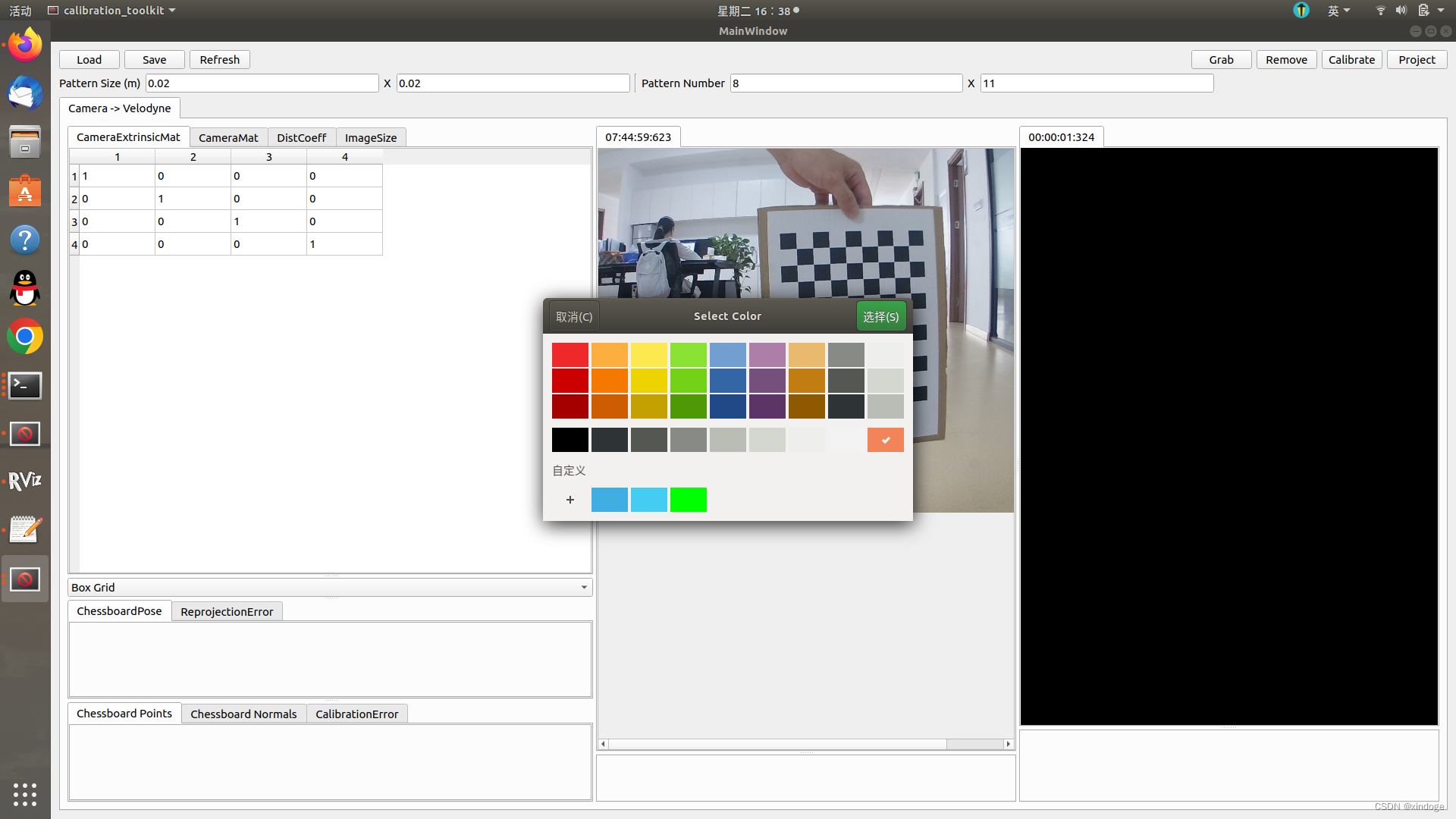
点云太淡可以按住键盘P键,加重点云颜色,O键减轻颜色。 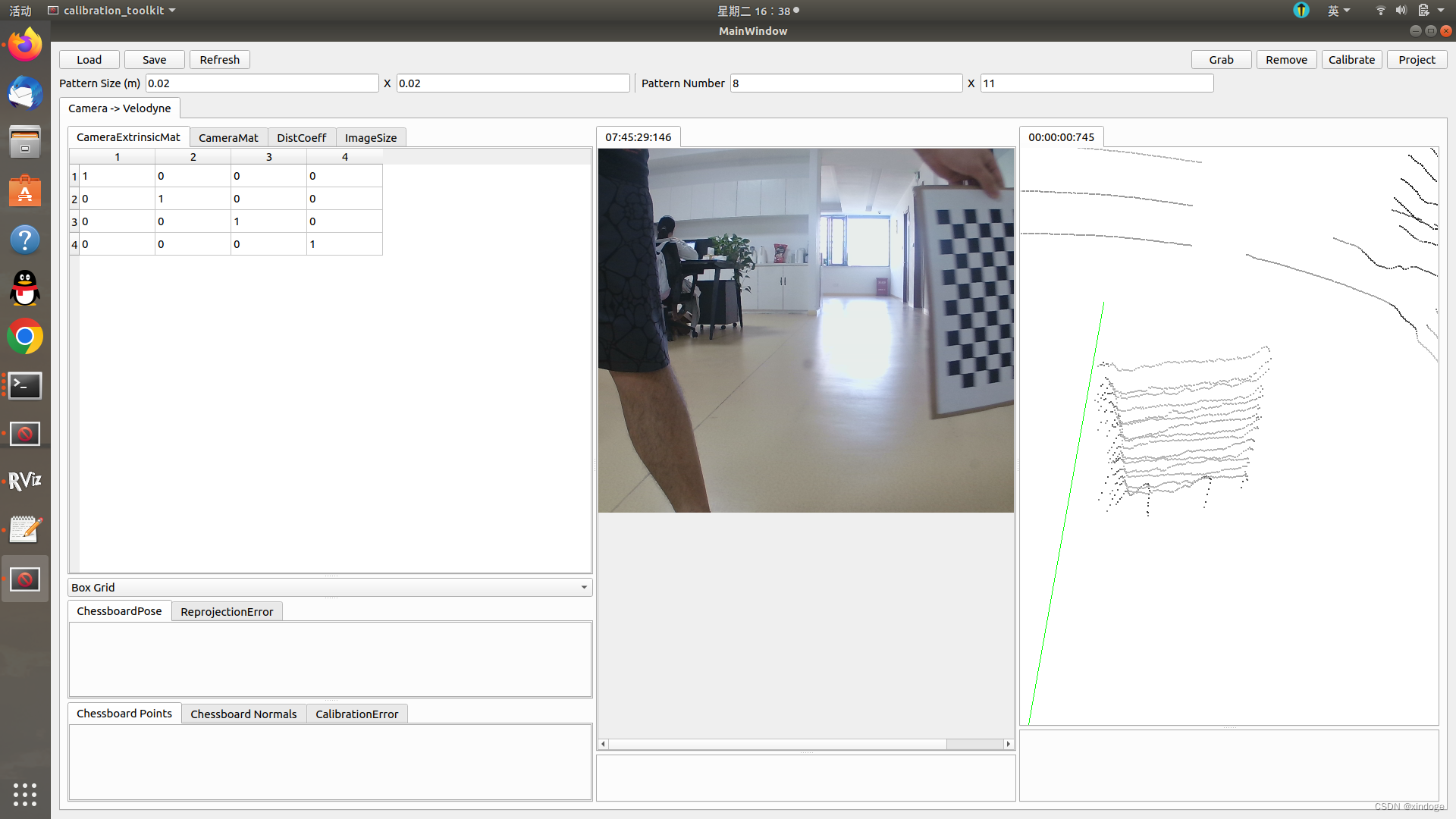
点击grab,截取标定板点云图并在右下角图片内圈选标定板部分,截取20帧左右。
截取成功,会在中间下半部分生成如图image_0图片,截取不成功可能是未识别到标定板,可以多点几次grab。
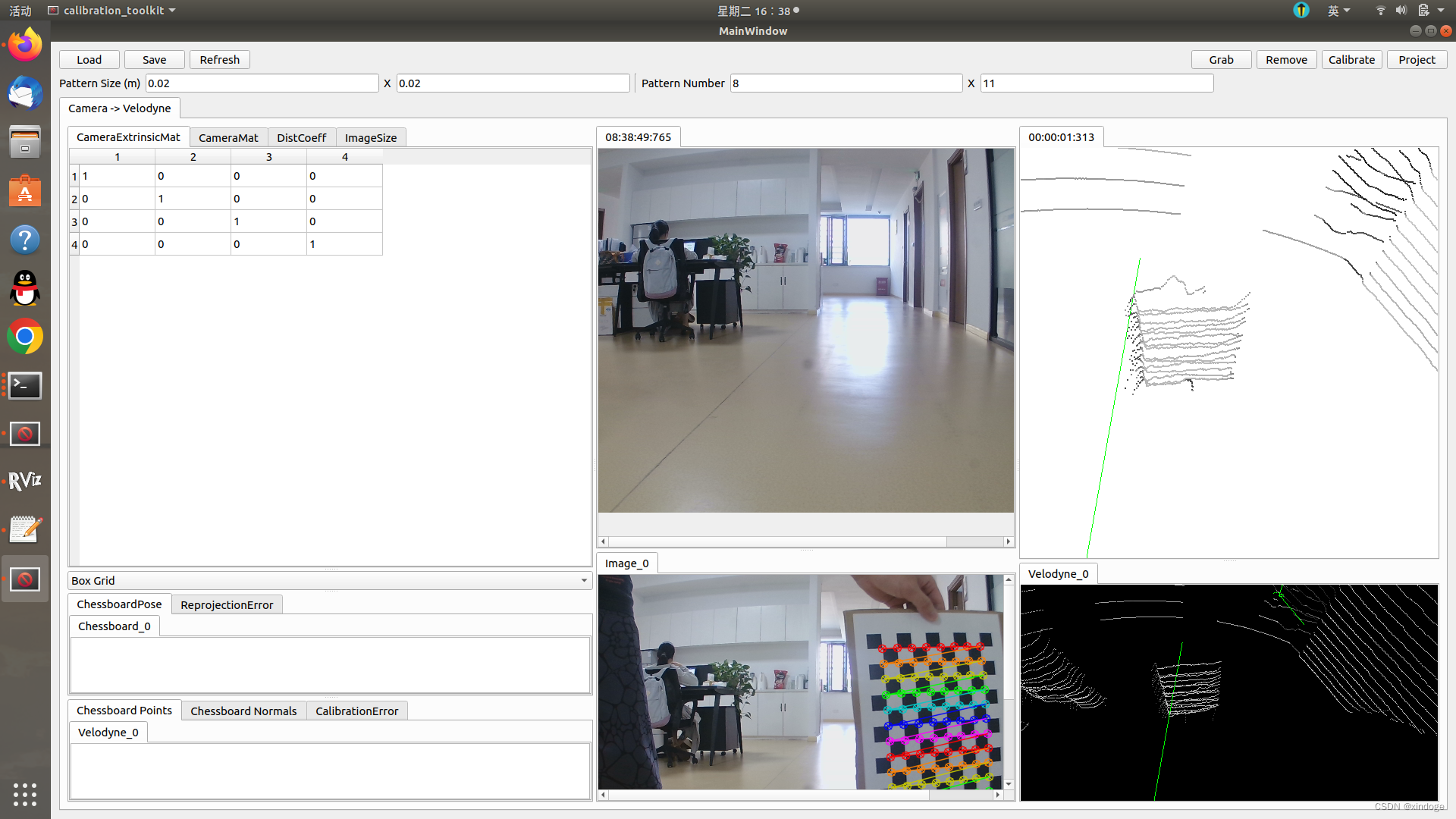
截取到足够多帧后,待回放结束,点击右上角Calibrate解算,短暂卡顿(电脑配置原因,因人而异),左上角得到矩阵信息。
最后点击左上角Save按钮,保存数据,记得命名否则无法保存。会跳出两个选项框,均选择否。至此,雷达和相机联合标定完成。