前言:本文对激光雷达产业进行梳理,从上游器件、中下游终端厂商等几个部分来剖析激光雷达产业链。
激光雷达:自动驾驶的核心传感器
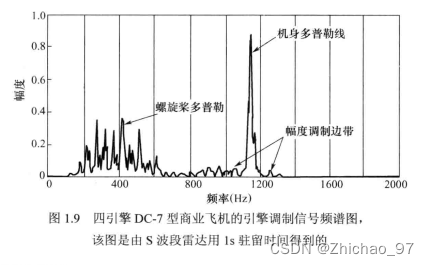
激光雷达是通过发射激光束作为来探测目标位置、速度、结构等特征的雷达系统。与其他雷达系统的原理类似,激光雷达是向目标发射探测信号(激光束),然后将探测目标反射回来的信号与发射时的原始信号进行比较,通过一定算法获得目标的相关信息,包括目标距离、方位、速度、甚至形状等。对外界环境感知能力上的优势,也使得激光雷达在自动驾驶技术发展之初就受到了青睐。
2018年,奥迪A8提供了激光雷达选配选项,成为了全球首款搭载激光雷达的量产乘用车型,但由于当时世界各国对自动驾驶法规还未完善,因此在绝大部分地区这款车型无法启用L3级自动辅助驾驶。
2021年被认为是激光雷达上车元年,小鹏P5成为首款量产搭载激光雷达的纯电智能汽车,随后多款搭载激光雷达的量产车型陆续上市,包括Lucid Air、蔚来ET7等等。而伴随着ADAS、robotaxi等的持续渗透,激光雷达需求也会迎来高速增长阶段。
IDC预测,全球自动驾驶汽车合计出货量将从2020年的2773.5万辆增至2024年的5424.7万辆,渗透率预计超过5成,2020-2024年的复合年均增长率达18.3%,其中L3级别2024年出货量或将达到约69万辆。
而2022年一季度,中国自动驾驶汽车市场上,L2级自动驾驶乘用车渗透率就高达23.2%,较2021年一季度的7.5%获得巨幅提升。
而根据沙利文预测,受无人驾驶车队规模扩张、激光雷达在ADAS中渗透率增加等因素推动,激光雷达整体市场预计将呈现高速发展态势,至2025年全球市场规模为135.4亿美元(约合914亿元);其中,中国激光雷达市场规模将达到43.1亿美元(约合291亿元)。
激光雷达技术路线、核心部件汇总
-
技术路线:扫描方式、测距方式
首先,从扫描方式上分类,激光雷达目前主要分为:机械旋转式、棱镜、转镜、MEMS振镜、OPA、Flash等。其中OPA、FLASH两种是实现固态激光雷达技术路线,而目前主流的混合固态激光雷达,则采用了棱镜、转镜、MEMS振镜等几种技术实现。
机械旋转式:通过将整个激光发射模块和接收模块进行横向360°旋转来获得全向的覆盖面。激光线束竖向排列形成一个面,而线数比如16线、64线就是竖向排列激光线束的数量,数量越多意味着分辨率越高,信息量也更大,因此我们在自动驾驶路测的车辆中能够经常看到这种类型的激光雷达。但机械旋转式激光雷达体积大、调试复杂、成本高、规模量产难、且由于机械结构特性导致难以满足车规级要求,寿命较短。
主要厂商:Velodyne、禾赛科技、速腾聚创
转镜:转镜分为一维转镜和二维转镜。一维转镜通过一个旋转的多面体反射镜,将激光反射到不同的方向,从而实现一定的视场范围;二维转镜顾名思义是内部集成了两个转镜,一个多边棱镜负责横向旋转,一个负责纵向翻转,这样可以实现用一束激光就能实现两个方向维度上的扫描。转镜激光雷达体积小、成本低,与机械式激光雷达效果一致,是目前混合固态雷达的主流路线。但毕竟也存在机械结构,且机械运动频率较高,寿命同样不够理想。
主要厂商:法雷奥Valeo、华为、Velodyne、镭神智能
MEMS振镜:采用集成在硅基芯片上的反射镜在前后左右各一对扭杆之间以一定谐波振动,将激光光束反射到不同角度,实现一定范围内的扫描。这种技术摆脱了机械运动部件的装配,提高可靠性,更易实现规模量产。同时可以降低激光雷达系统尺寸,激光发射器与探测器数量减少,能大幅降低成本。不过,有限的光学口径和扫描角度令测距和视场角受到限制,大视场角需要拼接,对算法要求较高。另外抗冲击性能、可靠性也存在一些问题。
主要厂商:速腾聚创、Innoviz、法雷奥Valeo
转镜+MEMS振镜:在二维转镜的基础上加入振镜,转镜负责横向,振镜负责纵向,可以实现更大扫描区域,频率更高,但价格同样也较高。
主要厂商:Innovusion图达通、Luminar
棱镜:通过控制两面楔形棱镜的相对转速,激光束通过两次折射,实现区域激光扫描覆盖。棱镜激光雷达累积的扫描图案形状像花瓣,中心点扫描次数密集,圆的边缘则相对稀疏,扫描时间持久才能丰富图像,所以需要加入多个激光雷达共工作,以便达到更高的效果。棱镜可以通过增加激光线束和功率实现高精与长距离探测,但结构复杂、体积更难控制,轴承与衬套磨损风险较大。目前也暂时只有Livox采用该技术,已经在小鹏P5上实现量产上车。
主要厂商:Livox
Flash:Flash的结构非常简单粗暴,原理就是通过高密度的激光源阵列,发射出能够覆盖一片区域的激光,用高灵敏度的接收器来构建图像。这种形式的激光雷达完全没有机械活动部件,体积小、精度高、扫描速度快。但容易形成旁瓣干扰、分散激光能量,影响探测距离和分辨率。
主要厂商:ibeo、LeddarTech、亮道智能
OPA:OPA激光雷达的原理是,通过多个激光发射单元组成发射阵列,通过调节发射阵列中各个单元的相位差,来改变激光光束的发射角度,在设定方向上产生互相加强的干涉从而实现高强度的指向光束,完成扫描。
一直以来,OPA激光雷达进展缓慢的一个重要原因是旁瓣效应难以解决。旁瓣效应是由于光学衍射产生的一种邻近效应。在OPA激光雷达上,光束通过OPA器件后的光束合成实际是由光波的相互干涉形成的,因此容易形成阵列干扰,令激光能量被分散,在最终出现光学伪影等问题。也正是因为这种原因,OPA视场和光束质量之间难以平衡。
主要厂商:Quanergy、洛微科技、力策科技
MMT(微动技术):MMT是一种用于激光雷达的独特成像技术,采用类似扬声器的音圈技术,专有的光学阵列会连接到音圈,当音圈通电时会产生微动,借助种微动激光雷达就能够扫描图像。这种设计具有最简单的光路,可产生最高的效率和最少的组件数量,体积小的同时内部机构件几乎不会有损耗。
此外,相比于其他激光雷达,MMT技术的激光雷达更强调分辨率,特别是垂直方向分辨率可以达到市面上激光雷达的4到5倍。MMT技术由激光雷达厂商Cepton首创,目前也仅有Cepton采用这种技术。
主要厂商:Cepton
激光雷达的测距,主要有两种形式,分别是ToF和FMCW。ToF也就是飞行时间,通过直接测量发射激光和回波信号的时间差计算出距离信息,探测精度高,响应速度快。ToF也是目前市场应用最广泛,最成熟的测距方式。
FMCW相干探测方法通过将发射激光的光频进行线性调制,将回波信号与参考光进行相干得到频率差,从而获得飞行时间反推目标物体距离。FMCW激光雷达具有可直接测量速度信息以及抗环境光和其他激光雷达干扰等优势。FMCW与OPA结合的激光雷达被认为是未来的“终极方案”。
-
核芯部件
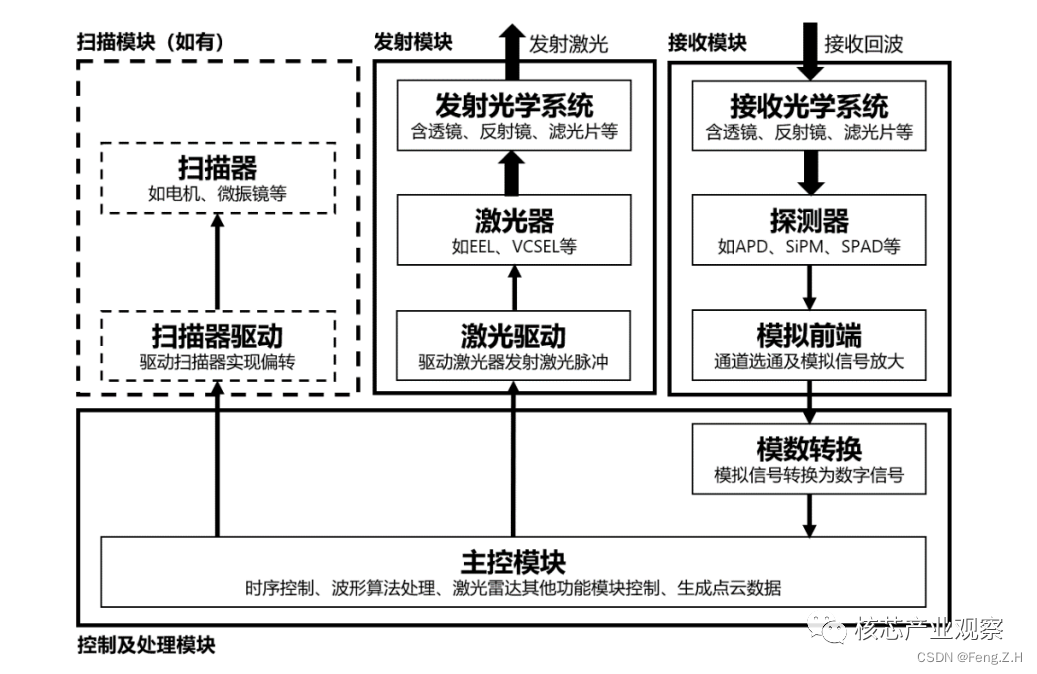
激光雷达主要由发射模块、接收模块、扫描模块、信号控制及处理(主控)模块四个部分构成。
来源:禾赛科技招股书
发射模块:边发射EEL、垂直腔面发射VCSEL、脉冲光纤激光器
接收模块:雪崩二极管APD、单电子雪崩二极管SPAD、硅光电倍增管SiPM、PIN二极管
扫描模块:MEMS微振镜、OPA硅光芯片、
主控模块:ADC、FPGA、SoC等
激光雷达的BOM成本主要是三个部分:硬件电子模块、光学模块、结构模块。其中硬件电子模块约占总成本的50%-60%,包括发射器和接收器各自配套的PCB板、FPGA板主要负责运算、加上以及主控板和电源模组;光学模块占总成本的10%-15%,包括反射镜、透镜、棱镜、窗口玻璃等;结构模块约占总成本的25%,包括支撑光学模块和硬件模块内部的一些支架,包括电机、轴承、支架、壳体等。
激光雷达产业链梳理
-
上游
1、激光器和探测器:半导体激光器主要的上游企业以海外为主,包括艾迈斯欧司朗、Lumentum、HAMAMATSU(滨松光子)、II-VI等;国内的供应商有纵慧芯光、瑞波光电、华芯半导体、长江华芯等。而光纤激光器主要供应商有海外的Luminar、 Lumibird、IPG光电、昂纳、以及国内的镭神智能等。
探测器方面,海外供应商主要有艾迈斯欧司朗、安森美、Firstsensor、HAMAMATSU、索尼等;国内有量芯集成、灵明光子、芯视界微电子、光迅科技、阜时科技等。
2、FPGA:FPGA通常被用作激光雷达的主控芯片,海外主流的供应商有赛灵思(AMD收购)、Altera(英特尔收购)、Lattice、Achronix等;国内主要的供应商有紫光同创、智多晶微电子、复旦微电子、安路科技、高云半导体等。
在产品性能上,目前国内厂商仍大幅落后于海外厂商,但国内产品的逻辑资源规模和高速接口性能,也能够满足激光雷达的需求。不过在禾赛科技招股书中,禾赛认为FPGA不是激光雷达主控芯片的唯一选择,也可以选用高性能MCU、DSP代替。MCU的国际主流供应商有瑞萨、英飞凌等,DSP的主流供应商有 TI、ADI等。
另外FPGA虽然是目前主流方案,但随着对性能及整体系统需求的提升,集成度更高的SoC可能会在未来激光雷达上受到广泛应用,比如集成了光电探测器、前端电路、波形数字化、波形算法处理、激光脉冲控制等功能模块的SoC。激光雷达SoC一般由激光雷达厂商自研,目前禾赛科技也在大力布局。
3、模拟芯片:主要是高精度ADC,在发光控制、光电信号转换,以及电信号实时处理等关键子系统上都需要用到。海外主流的供应商有TI、ADI等,国内矽力杰、圣邦微、芯海科技等都可以供应相关芯片,但与海外龙头产品在性能上有一些差距。
4、光学部件:包括有MEMS振镜、各种光学镜片、OPA硅光芯片等。MEMS振镜主要由海外厂商供应,HAMAMTSU、英飞凌、ST等;国内波弗光电、知微传感、英唐智控、镭神智能等都有相关产品布局或已经被应用。
光学镜片方面,舜宇光电、水晶光电、炬光科技、滕景科技等国内厂商已经有成熟的技术,国内供应链在光学部件已经达到国际领先水平,且在成本方面更具竞争优势,可以完全替代国外供应链并满足产品加工的需求。
OPA硅光芯片目前还未有量产产品出现,海外主要是Quanergy在进行研发,国内洛微科技、光迅科技等都在布局。受限于芯片进展缓慢,OPA激光雷达普遍预计要到2025年才会实现规模量产。
-
中下游
法雷奥valeo:2021年占全球激光雷达市场份额28%,排名第一。最早在2018年奥迪A8上首次实现激光雷达量产上车,目前已经上车的SCALA1/2代采用转镜式,最新一代产品采用MEMS振镜。
Velodyne:自动驾驶激光雷达开创者,目前产品线有机械旋转式和转镜式激光雷达。但近年市场上涌现的激光雷达公司,令其产品竞争力大幅削弱,且价格相对友商较高,2021年市场份额仅占3%。
速腾聚创:2021年占全球激光雷达市场份额10%排名第二,产品线涵盖机械旋转式、MEMS振镜式。其中MEMS振镜激光雷达已经获得多家主机厂订单,目前已经在广汽埃安LX Plus、智己L7、小鹏G9、路特斯Eletre、Lucid Air等车型上被搭载。
Livox:大疆旗下公司,2021年市占率7%,是目前唯一采用了棱镜式扫描的激光雷达厂商,目前车规激光雷达产品已经在小鹏P5上量产搭载。
Luminar:2021年市占率7%,是市场上最早采用1550nm光纤激光器作为光源的激光雷达厂商。采用转镜+MEMS振镜二维扫描方案,下半年即将上市的上汽非凡R7将搭载采用该方案的IRIS激光雷达。
Innoviz:2021年市占率4%,产品采用MEMS振镜扫描方案,主要与Tier1合作,主机厂方面目前与宝马合作,在宝马iX车型上搭载。
Ibeo:2021年市占率3%,旗下产品有机械旋转式和Flash固态两种,固态Flash激光雷达已经与长城签下定点,未来会在一款旗舰车型上搭载ibeo的Flash固态激光雷达。
Innovusion图达通:2021年市占率3%,技术路线与Luminar相同,采用1550nm光源,转镜+MEMS振镜二维扫描方案。目前其Falcon激光雷达已经在蔚来ET7、ES7车型上量产搭载。
禾赛科技:2021年市占率3%,产品线涵盖机械旋转式、转镜式激光雷达。禾赛AT128混合固态激光雷达已经在理想L9上实现量产搭载。
华为:2021年市占率3%,目前只有一款96线转镜式激光雷达,在极狐阿尔法S HI版、哪吒S、阿维塔11上实现量产搭载。
Cepton:Cepton与Livox类似,走了一条与市面上其他技术产品不同的技术路线。Cepton采用了MMT(Micro Motion Technology微动技术)作为扫描机构,相比市面上混合固态激光雷达体积更小,可靠性更高。目前Cepton已绑定Tier1,拿下通用汽车的大批量订单。
Aeva:近期Aeva宣布首批Aeries II 4D激光雷达传感器已经成功投产并向战略客户交付。Aeries II采用了FMCW测距技术,并将所有关键传感组件(包括发射器、光学元件和接收器)集成在一个紧凑模块中的硅光子芯片上,这使得FMCW激光雷达更容易实现规模化量产,体积更小。但Aeva的FMCW激光雷达真正量产还要到2025年左右才能实现。
Quanergy:Quanergy是最早进入OPA激光雷达领域的公司,今年5月,Quanergy公布了其OPA激光雷达实现250米的检测距离,而15个月前这个数字是100米。据Quanergy官方介绍,其OPA技术基于CMOS工艺兼容的硅光芯片,可以实现大规模生产。但截至目前,Quanergy的S系列OPA激光雷达依然难以达到大规模量产的同时满足客户要求。据称该公司的OPA激光雷达预计要到2025年后才实现规模量产。
总结
激光雷达在自动驾驶的应用,最大的阻碍可以总结成:成本、使用寿命、体积。而目前来看,激光雷达的可靠性主要由收发系统和扫描系统决定,相应模块的供应链越成熟,成本越低,越易通过车规认证。
纵观激光雷达市场,现阶段905nm+转镜/MEMS振镜+ToF的方案最成熟,也是主流被应用于量产车型上的激光雷达普遍方案。随着低成本、高产能、高性能等需求,未来纯固态激光雷达可能会在2025年后陆续成为主流。业界主流观点认为,OPA+FMCW是未来激光雷达的终极解决方案,兼顾易于大规模生产、高性能等优势,并受益于硅光工艺发展实现光电器件的快速降本。