采用Arduino Nano控制模块制作的超声波测距平衡小车
1、项目概述
因为第一次制作自平衡小车,心里没底,也就没有投入过多的资金,一切按照最小配置进行,所以选择“TT马达”,俗称“香蕉电机”的小车底盘。在等快递送货期间,才看到各种说用“香蕉电机”做自平衡小车的问题,最大的问题就是电机启动对传感器和单片机的干扰问题,还有就是平衡的稳定性不好等问题。在我以Arduino + MPU6050 + L298N为核心做完后,闲得没事干,就想做一款成本低,易上手,最小配置和最基本功能的自平衡小车,其目的就是给那些没有什么经验的刚入行的新手们提供一个入门的解决方案。所以这个项目的目标有以下几点:
a、成本低;
b、目标功能明确,就是实现小车的自平衡;
c、系统稳定可靠;
d、调试、操作方便简单。
2、项目方案
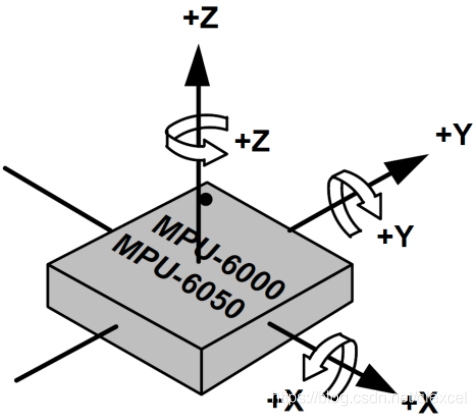
基于上述目标,本方案采用超声波测距模块作为小车平衡状态的检测,免去了对加速度、陀螺仪传感器的理解和复杂处理算法。小车的平衡控制仍然采用网络上流行的Arduino开源硬件,再加上电机驱动模块 L298N,电机仍然采用TT马达(香蕉电机)。
该方案为了降低成本,采用电位器调整设定小车的平衡参数,不使用蓝牙无线模块或有线串口在线调整参数。
用超声波测距的方式实现的自平衡小车,网络上有人提出这种方案无法在坡度变化的斜坡上保持平衡,这种说法经过我的实践,是有解决方案的,这个问题我将在后面进行阐述。
平衡控制的算法还是采用平衡车中经典的PD算法。
3、硬件设计
硬件设计比较简单&#