转自:https://jiaxing.19lou.com/board-53011512526634962-thread-48281514511127281-1.html
http://bbs.elecfans.com/jishu_546527_1_1.html
akeblock金属机器人是适合8-14周岁孩子的带有金属感的机器人,须要学员用螺丝刀配合完成,在配合中模块化编程,让机器人拥有各种行为,也可用红外线操控,感受智能带来的便利。
其中mBot是是一个低门槛的教育机器人非常适合初学者学习STEAM(科学、技术、工程学、数学)领域的知识,亲身体验机械学、电子学、控制系统以及计算机科学的魅力。这款机器人虽是入门级教育机器人,但性价比较高,功能和扩展性基于其强大的mCore主板一点都不弱。
那接下来我们就来看看mCore主控板吧
简介
mCore是一个易于使用的主控板是专门设计用于与mbot。基于Arduino Uno、电集成各种机载传感器,如蜂鸣器、光传感器、RGB LED,等,为您提供了一个更简单的方式来开始学习电子。
特征
1、配备makeblock和Arduino易于编程。
2、包括各种功能传感器,如蜂鸣器,光传感器,RGB LED等。
3、长时间使用的usb型B连接器设计。
4、自恢复保险丝防止板被烧伤。
5、四种颜色标记的rj25连接器,方便布线和扩展更多的Arduino传感器。
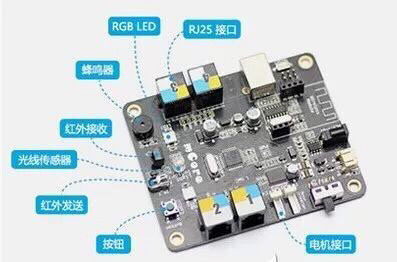
这块巴掌大小的mCore主板就是mBot的大脑,它集成了主控、各种传感器控制、USB、蓝牙、LED灯、蜂鸣器、电源等诸多功能,这些功能全都包含在Arduino开源编程环境之下,只要改变程序设置,就能自由控制mCore上的各种功能。
蜂鸣器
蜂鸣器是一种一体化结构的电子讯响器,采用直流电压供电,广泛应用于计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件。
该电路是经典的蜂鸣器控制电路,即由开关三极管、续流二极管,限流电阻组成。其中:蜂鸣器是发声元件,在其两端施加直流电压(有源蜂鸣器)或者方波(无源蜂鸣器)就可以发声,mBot上应该是无源蜂鸣器;又因为蜂鸣器本质上是一个感性元件,其电流不能瞬变,因此必须有一个续流二极管提供续流,否则,在蜂鸣器两端会产生几十伏的尖峰电压,可能损坏三极管,并干扰整个电路系统的其他部分; 三极管起开关作用,其基极的高电平使三极管饱和导通,使蜂鸣器发声,而基极低电平则使三极管关闭,蜂鸣器停止发声。
红外电路
红外电路由两部分组成,一个是红外发射电路,一个是红外接收电路,如上图所示,由于芯片ATMega328引脚的驱动能力有限,故在发射电路中,使用三极管放大电路来驱动红外发射管的工作。在接收电路中,使用一个上拉电阻,来保证能够接收到高低电平。
按键电路
按键电路即上图中的按钮,是最常见的输入方式,其应用非常简单,按下低电平,弹上高电平。
RGB Led
RGB LED是LED灯的一种,它与以往的三色灯不同,它使用了一个集控制电路与发光电路于一体的智能外控LED光源,即WS1812B。
WS2812B是一个集控制电路与发光电路于一体的智能外控LED光源。其外型与一个5050LED灯珠相同,每个元件即为一个像素点。像素点内部包含了智能数字接口数据锁存信号整形放大驱动电路,还包含有高精度的内部振荡器和可编程定电流控制部分,有效保证了像素点光的颜色高度一致。数据协议采用单线归零码的通讯方式,像素点在上电复位以后,DIN端接受从控制器传输过来的数据,首先送过来的24bit数据被第一个像素点提取后,送到像素点内部的数据锁存器,剩余的数据经过内部整形处理电路整形放大后通过DO端口开始转发输出给下一个级联的像素点,每经过一个像素点的传输,信号减少24bit。像素点采用自动整形转发技术,使得该像素点的级联个数不受信号传送的限制,仅仅受限信号传输速度要求。
光线传感器
光线传感器的电路非常简单,主要理解光敏电阻,随着光照强度的增加,其电阻值会逐渐减小这一特性,反应到电路上,就是光照越强,A6端的电压越大。
RJ25接口
RJ这个名称代表已注册的插孔(Registered Jack),是来源于贝尔系统的USOC (Universal Service Ordering Codes,通用服务分类代码) 代码。USOC 是一系列已注册的插孔及其接线方式,是由贝尔系统开发的,用于将用户的设备连接到公共网络。FCC 规定控制着这一目的的应用。
成果展示
孩子们可以用Makeblock来和Arduino平台的传感器和执行器进行数据交互,将数据导入mCore主控板。从而控制机器人的移动,操控机械臂,控制一个倒水机器人,发射小球的机器人,控制相扑机器人和别人对战,甚至控制一些家用和竞赛,教育的机器人。