文章目录
- 1基于角度的遮挡检测方法
- 2遮挡检测遍历方法
- 2.1方法1--自适应径向扫描方法
- 2.2方法2--螺旋扫描法
- 参考
1基于角度的遮挡检测方法
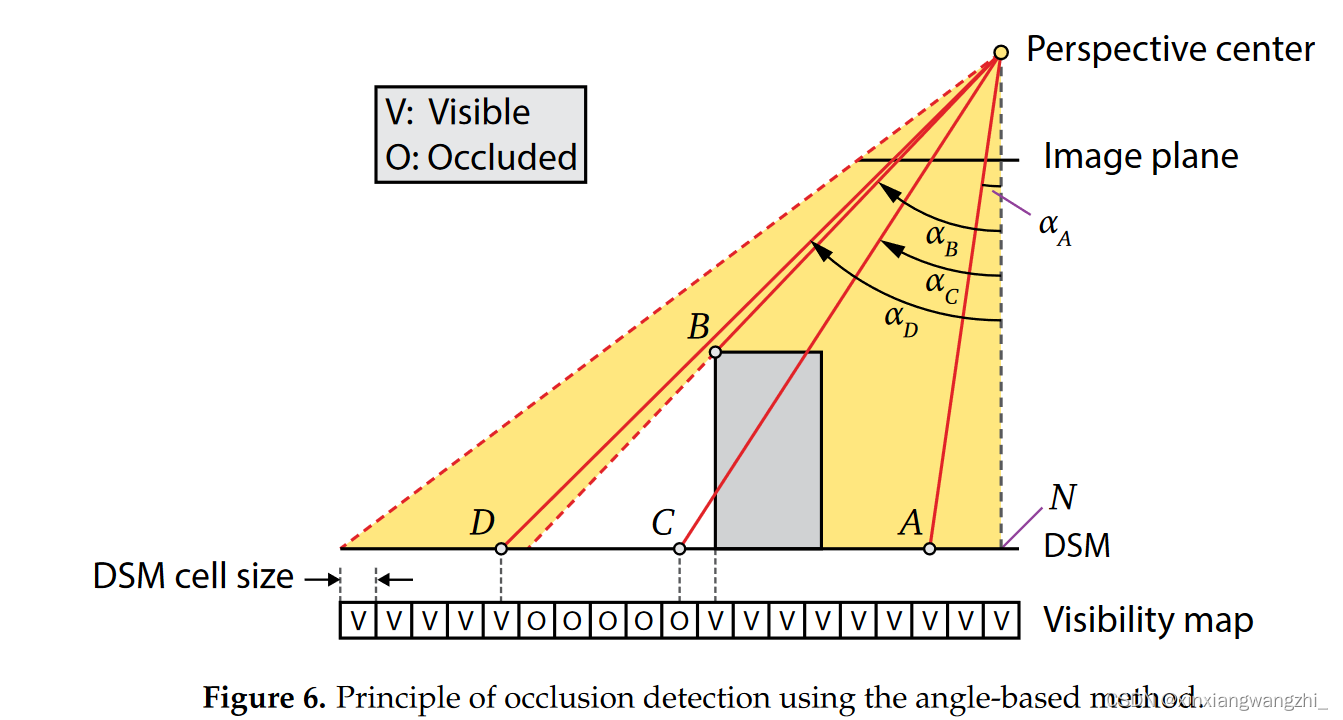
在基于角度的方法中,通过依次分析DSM中沿径向方向的投影光线的角度来识别遮挡。定义α\alphaα角:DSM三维点与相机中心在垂直方向的夹角。从位于物方最低点的DSM单元格出发,分析每个径向剖面上的连续α角,如果该剖面中不存在遮挡,后续DSM单元的α角将逐渐增大。因此,如果α角随着远离相机中心正下方(nadir point)而增加,则相应的DSM单元将被视为可见。反之,当远离相机中心正下方点时,α角突然减小,则随后的DSM单元被认为遮挡,直到α角超过与最后一个可见单元相关的角度。
如图所示,如果在远离相机中心正下方点( N )时α角增大,则认为各自的DSM格点(例如单元A和B)是可见的。在这个例子中,DSM单元C被识别为第一个被遮挡的单元,因为在这个位置( αC < αB),α角出现了的减小的情况。从图中可以看出,与DSM单元D相关的α角超过了最后一个可见单元( B )的角度;因此,D被认为是可见的。相应地,B和D之间的DSM单元在对应的能见度图中被标记为遮挡。
2遮挡检测遍历方法
对于DSM而言,怎么遍历DSM网格是一个问题。
2.1方法1–自适应径向扫描方法
文中提出了以相机中心为原点,类似极坐标似的搜索方式。
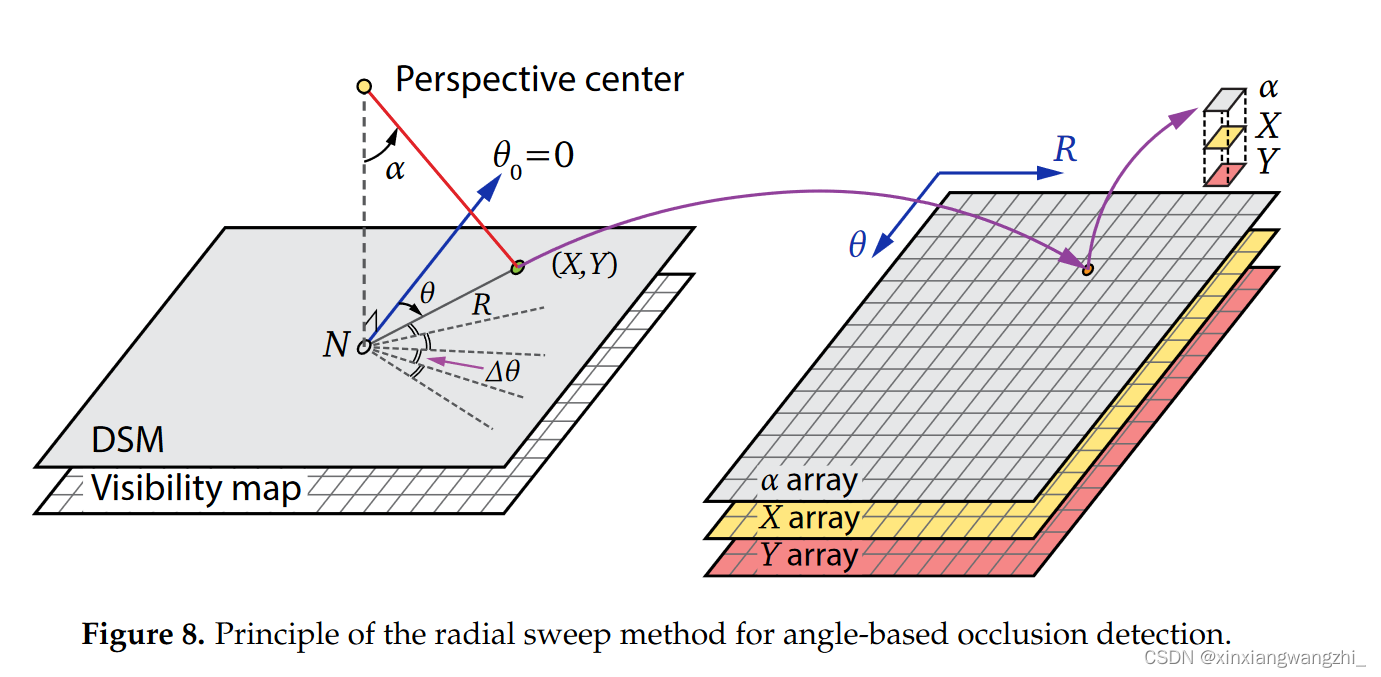
如上图所示,使用径向扫描算法进行遍历,该方法从零方位角( θ0 = 0)沿径向的α角开始,在检查DSM单元沿该剖面的可见性后,算法通过在当前方位角( θ0 )上添加一个预定义的角度值(∆θ )移动到下一个径向剖面。通过径向剖面并沿其应用基于角度的方法来检测遮挡。对于每个DSM单元,计算各自的R、θ和α值,R是DSM单元到相机中心正下方点的距离。如图右所示。定义一个R到θ数组用于存储与每个DSM单元相关的α角。此外,定义了两个与R到θ数组具有相同幅度和单元大小的数组来存储DSM单元的X和Y坐标。
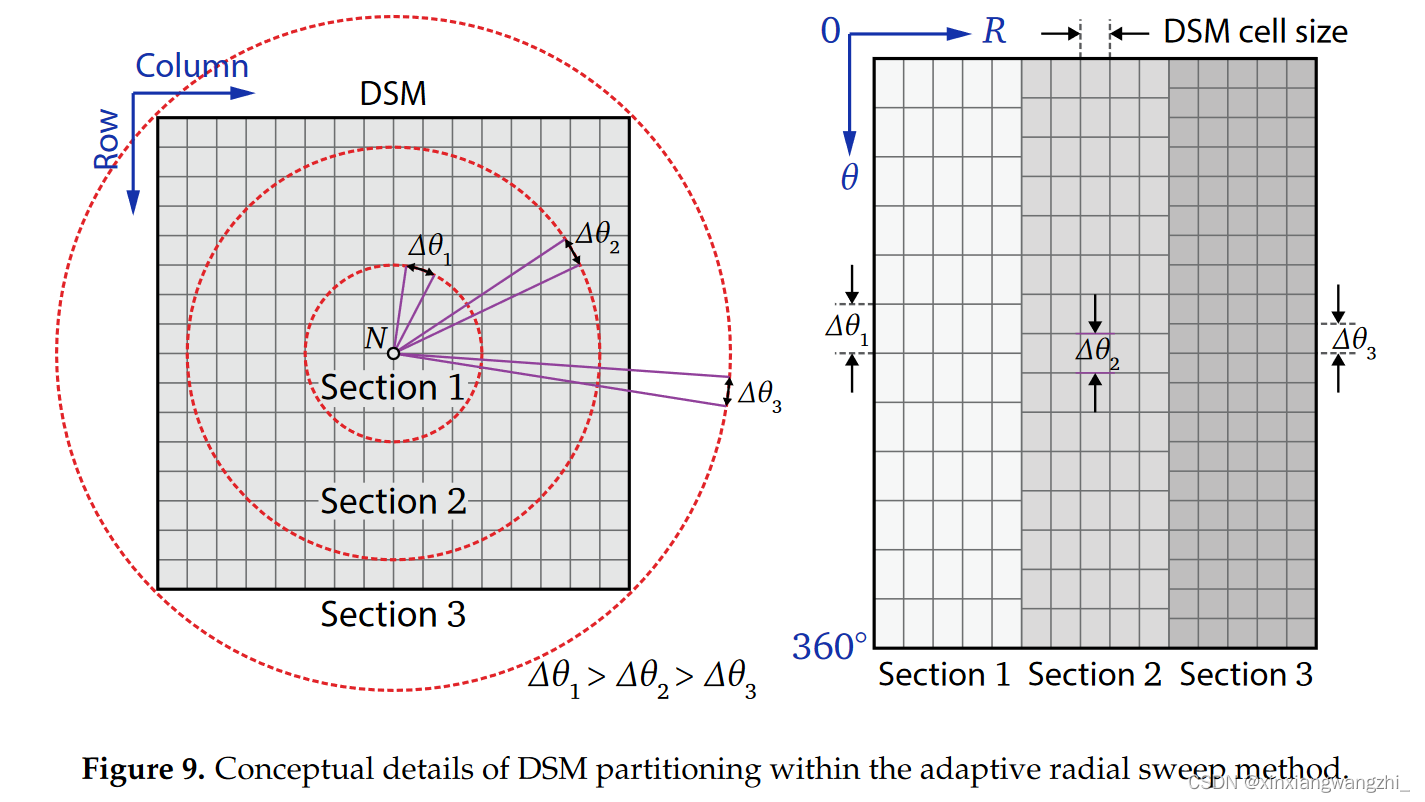
方位角增量(∆θ)是关键。太小的∆θ会导致重复访问DSM单元,太大的∆θ会导致漏掉边缘的DSM单元。通过自适应径向扫描方法来避免这个问题:即让Δθ随着径向距离R的增加而减小。如下图所示,在该技术中,DSM被划分为以相机中心正下方点( N )为中心的同心放射状区域,如下图 (左)所示。从下图 (左)可以看出,随着径向距离( R )的增加,截面的Δθ减小。因此,下图 (右)所示,R到θ数组中的行数随着R的增大而增大。径向截面的数量和∆θ值是根据相应图像覆盖的DSM面积和DSM单元大小定义的。对于每个径向截面,∆θ可以设置为一个值,使得同心圆对应的∆θ角度的弧长不大于DSM单元尺寸。
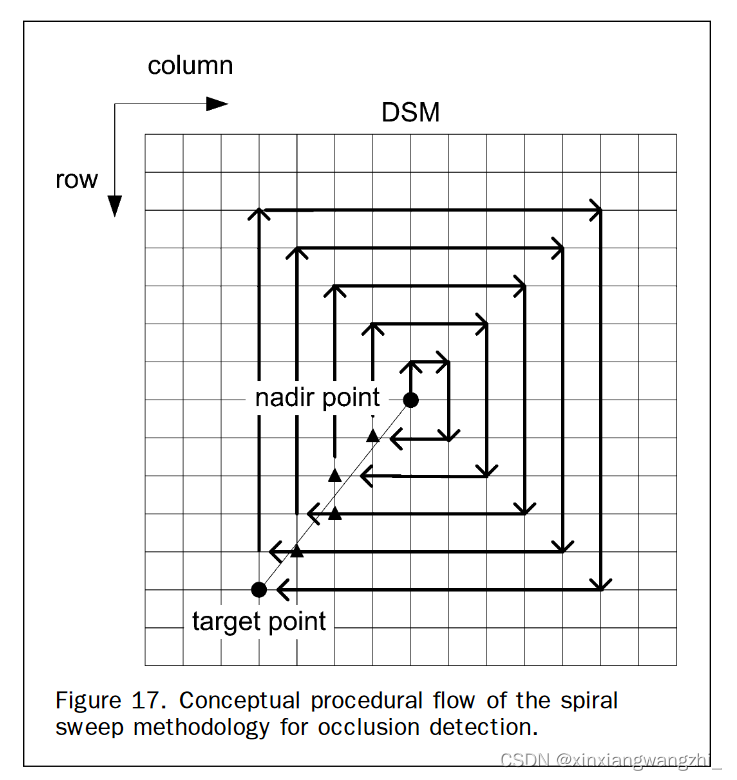
2.2方法2–螺旋扫描法
螺旋扫描方法以螺旋模式扫描从相机中心正下方点对应的DSM单元开始,同时直接检查沿径向的角度(即:遮挡检测用的角度),而不需要DSM分区或额外的阵列。
参考
《New Methodologies for True Orthophoto Generation》(原文)
《True Orthophoto Generation from Aerial Frame Images and LiDAR Data: An Update》