题目:围绕中国旅行商问题完成综合性实验报告
旅行商问题(TSP问题)。
假设有一个旅行商人要拜访全国31个省会城市,它需要选择所要走的路径,路径的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。对路径选择的要求是:所选路径的路成为所有路径之中的最小值。
要求:1、城市数不低于30个;
2、自选某种计算智能算法完成(神经网络、蚁群算法、遗传算法….).
1、遗传算法
仿真过程:
(1)初始化种群数目NP=200,染色体基因维数为N=31,最大进化代数G=1000.
(2)产生初始种群,计算个体适应度值,即路径长度:采用基于概率的方式选择进行操作的个体;对选中的成对个体,随机交叉所选中的成对城市坐标,以确保交叉后路径每个城市只到访一次;对选中的单个个体,随机交换其一对城市坐标作为变异操作,产生新的种群,进行下一次遗传操作。
(3)判断是否满足终止条件:若满足,则结束搜索过程,输出优化值,若不满足,则继续进迭代优化。
clear all; % 清除所有变量
close all; % 关闭所有窗口
clc; % 清空命令行窗口%% 初始化参数
C=[1304 2312;3639 1315;4177 2244;3712 1399;3488 1535;3326 1556;...3238 1229;4196 1044;4312 790;4386 570;3007 1970;2562 1756;...2788 1491;2381 1676;1332 695;3715 1678;3918 2179;4061 2370;...3780 2212;3676 2578;4029 2838;4263 2931;3429 1908;3507 2376;...3394 2643;3439 3201;2935 3240;3140 3550;2545 2357;2778 2826;...2370 2975]; %31个省会城市坐标
N=size(C,1); %TSP问题的规模,即城市数目
D=zeros(N); %任意两个城市距离间隔矩阵%% 求任意两个城市距离间隔矩阵
for i=1:Nfor j=1:ND(i,j)=((C(i,1)-C(j,1))^2+(C(i,2)-C(j,2))^2)^0.5; % 计算两个城市之间的距离end
end
NP=200; %免疫个体数目
G=1000; %最大免疫代数
f=zeros(NP,N); %用于存储种群
F = []; %种群更新中间存储
for i=1:NPf(i,:)=randperm(N); %随机生成初始种群,每个个体是一个长度为N的序列,代表访问城市的顺序
end
R = f(1,:); %存储最优种群
len=zeros(NP,1); %存储路径长度
fitness = zeros(NP,1); %存储归一化适应度值
gen = 0; %代数计数器%% 遗传算法循环
while gen<G%% 计算路径长度for i=1:NPlen(i,1)=D(f(i,N),f(i,1)); % 计算首尾相接的距离for j=1:(N-1)len(i,1)=len(i,1)+D(f(i,j),f(i,j+1)); % 计算每个个体对应的路径长度endendmaxlen = max(len); % 计算最大路径长度minlen = min(len); % 计算最小路径长度%% 更新最短路径rr = find(len==minlen);R = f(rr(1,1),:); % 存储当前代的最优个体(即路径最短)%% 计算归一化适应度for i =1:length(len)fitness(i,1) = (1-((len(i,1)-minlen)/(maxlen-minlen+0.001))); % 计算适应度值,取0~1之间的值end%% 选择操作nn = 0;for i=1:NPif fitness(i,1)>=randnn = nn+1;F(nn,:)=f(i,:); % 将适应度大于一个随机数的个体复制到新的种群中endend[aa,bb] = size(F);while aa<NPnnper = randperm(nn);A = F(nnper(1),:); % 随机选择两个个体进行交叉变异操作B = F(nnper(2),:);%% 交叉操作W = ceil(N/10); % 交叉点个数p = unidrnd(N-W+1); % 随机选择交叉范围,从p到p+Wfor i =1:Wx = find(A==B(p+i-1)); % 相同位置的元素交换y = find(B==A(p+i-1));temp = A(p+i-1);A(p+i-1) =B(p+i-1);B(p+i-1) = temp;temp = A(x);A(x) = B(y);B(y) = temp;end%% 变异操作p1 = floor(1+N*rand());p2 = floor(1+N*rand());while p1==p2p1 = floor(1+N*rand()); % 获得两个不同的随机位置p2 = floor(1+N*rand());endtmp = A(p1);A(p1) = A(p2); % 交换两个位置的元素A(p2) = tmp;tmp = B(p1);B(p1) = B(p2);B(p2) = tmp;F = [F;A;B]; % 加入交叉变异后的两个个体[aa,bb] = size(F);endif aa>NPF = F(1:NP,:); % 保持种群规模为NPendf = F; % 更新种群f(1,:) = R; % 保留每代最优个体clear F;gen = gen+1; % 代数加1Rlength(gen) = minlen; % 存储每一代的最短路径
end%% 绘制图形
figure
for i = 1:N-1 plot([C(R(i),1),C(R(i+1),1)],[C(R(i),2),C(R(i+1),2)],'bo-'); % 绘制城市之间的路径hold on;
endplot([C(R(N),1),C(R(1),1)],[C(R(N),2),C(R(1),2)],'ro-'); % 绘制回到起点的路径
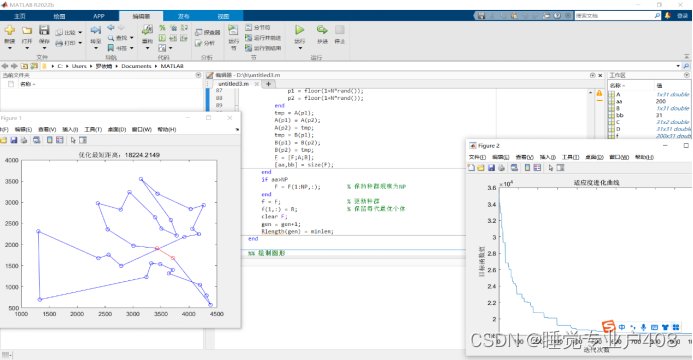
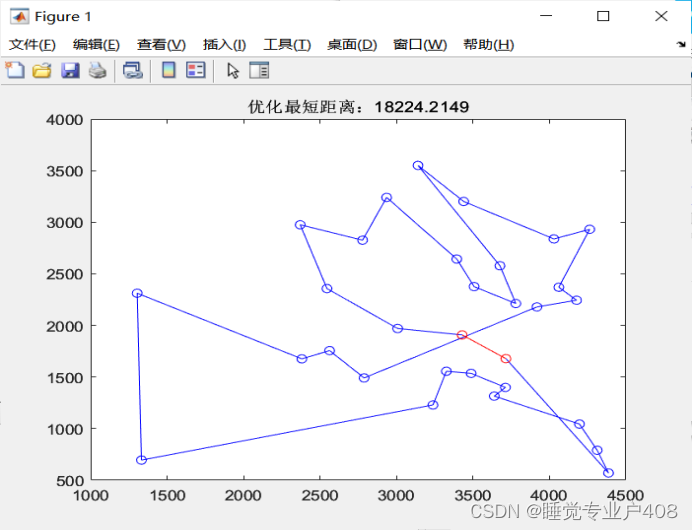
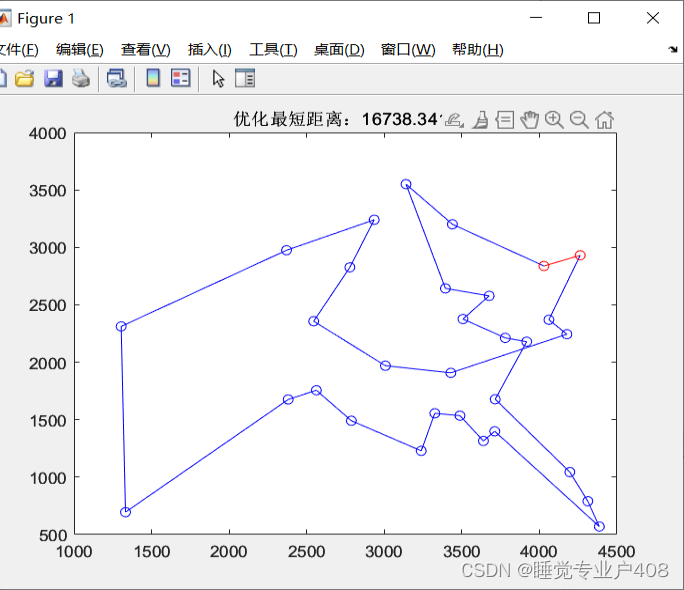
title(['优化最短距离:',num2str(minlen)]); % 标题为路径最短距离
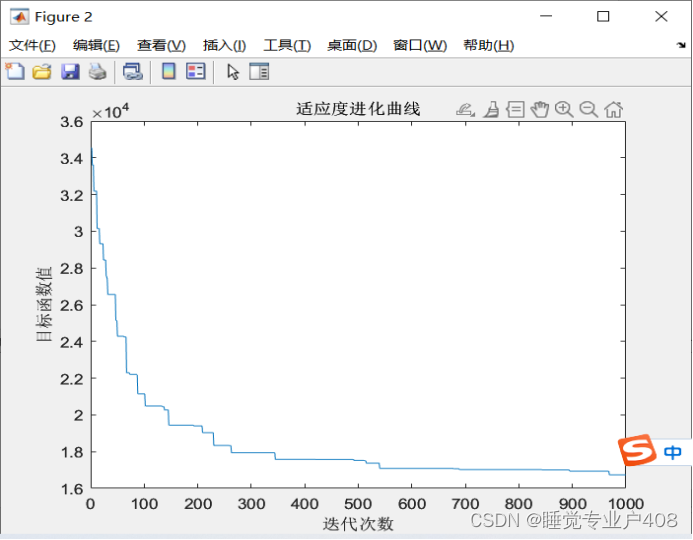
figure
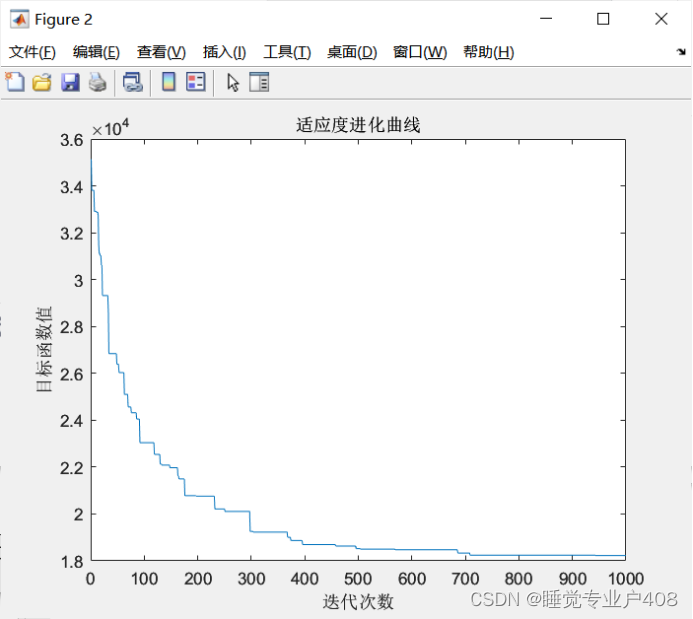
plot(Rlength) % 绘制适应度进化曲线
xlabel('迭代次数')
ylabel('目标函数值')
title('适应度进化曲线')
运行结果:
由于初始位置不确定,每次结果也不一样。如下图所示:
第一次:
第二次:
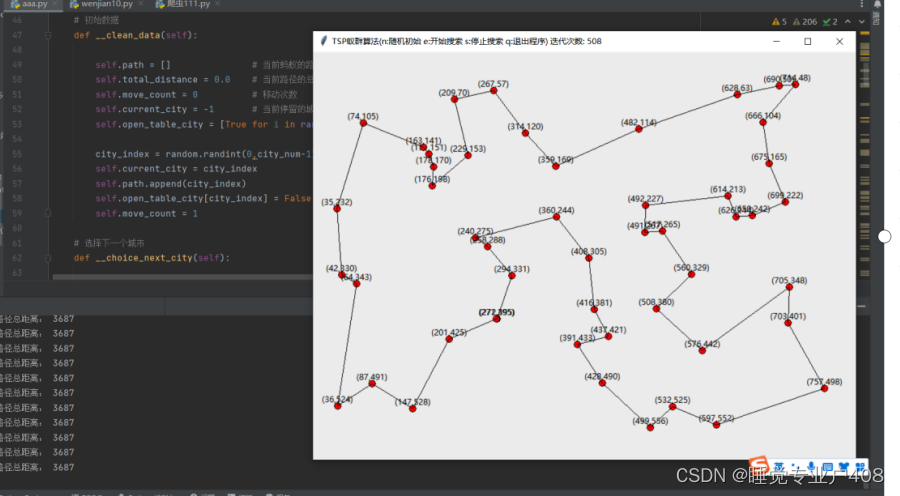
蚁群算法(python)
参数设置
β 值: 2
值(状态转移方法阈值):0.9
: 一般设定为 , n 为城市数量为根据最邻近(nearest neighbor)启发式算法得到路线长度。
α 值(全局更新的蒸发率):0.1ρ 值(局部更新的蒸发率):0.1初始化蚂蚁数量n的值:设定为10,文中提供了一种设置的方法。如果不知道怎么设置的话,一般情况下的可以设置n=m。
import random
import copy
import time
import sys
import math
import tkinter #//GUI模块
import threading
from functools import reduce
# 参数
'''
ALPHA:信息启发因子,值越大,则蚂蚁选择之前走过的路径可能性就越大,值越小,则蚁群搜索范围就会减少,容易陷入局部最优
BETA:Beta值越大,蚁群越就容易选择局部较短路径,这时算法收敛速度会加快,但是随机性不高,容易得到局部的相对最优
'''
(ALPHA, BETA, RHO, Q) = (1.0,2.0,0.5,100.0)
# 城市数,蚁群
(city_num, ant_num) = (50,50)
distance_x = [178,272,176,171,650,499,267,703,408,437,491,74,532,416,626,42,271,359,163,508,229,576,147,560,35,714,757,517,64,314,675,690,391,628,87,240,705,699,258,428,614,36,360,482,666,597,209,201,492,294]
distance_y = [170,395,198,151,242,556,57,401,305,421,267,105,525,381,244,330,395,169,141,380,153,442,528,329,232,48,498,265,343,120,165,50,433,63,491,275,348,222,288,490,213,524,244,114,104,552,70,425,227,331]
#城市距离和信息素
distance_graph = [ [0.0 for col in range(city_num)] for raw in range(city_num)]
pheromone_graph = [ [1.0 for col in range(city_num)] for raw in range(city_num)]#----------- 蚂蚁 -----------
class Ant(object):# 初始化def __init__(self,ID):self.ID = ID # IDself.__clean_data() # 随机初始化出生点# 初始数据def __clean_data(self):self.path = [] # 当前蚂蚁的路径 self.total_distance = 0.0 # 当前路径的总距离self.move_count = 0 # 移动次数self.current_city = -1 # 当前停留的城市self.open_table_city = [True for i in range(city_num)] # 探索城市的状态city_index = random.randint(0,city_num-1) # 随机初始出生点self.current_city = city_indexself.path.append(city_index)self.open_table_city[city_index] = Falseself.move_count = 1# 选择下一个城市def __choice_next_city(self):next_city = -1select_citys_prob = [0.0 for i in range(city_num)] #存储去下个城市的概率total_prob = 0.0# 获取去下一个城市的概率for i in range(city_num):if self.open_table_city[i]:try :# 计算概率:与信息素浓度成正比,与距离成反比select_citys_prob[i] = pow(pheromone_graph[self.current_city][i], ALPHA) * pow((1.0/distance_graph[self.current_city][i]), BETA)total_prob += select_citys_prob[i]except ZeroDivisionError as e:print ('Ant ID: {ID}, current city: {current}, target city: {target}'.format(ID = self.ID, current = self.current_city, target = i))sys.exit(1)# 轮盘选择城市if total_prob > 0.0:# 产生一个随机概率,0.0-total_probtemp_prob = random.uniform(0.0, total_prob)for i in range(city_num):if self.open_table_city[i]:# 轮次相减temp_prob -= select_citys_prob[i]if temp_prob < 0.0:next_city = ibreak# 未从概率产生,顺序选择一个未访问城市# if next_city == -1:# for i in range(city_num):# if self.open_table_city[i]:# next_city = i# breakif (next_city == -1):next_city = random.randint(0, city_num - 1)while ((self.open_table_city[next_city]) == False): # if==False,说明已经遍历过了next_city = random.randint(0, city_num - 1)# 返回下一个城市序号return next_city# 计算路径总距离def __cal_total_distance(self):temp_distance = 0.0for i in range(1, city_num):start, end = self.path[i], self.path[i-1]temp_distance += distance_graph[start][end]# 回路end = self.path[0]temp_distance += distance_graph[start][end]self.total_distance = temp_distance# 移动操作def __move(self, next_city):self.path.append(next_city)self.open_table_city[next_city] = Falseself.total_distance += distance_graph[self.current_city][next_city]self.current_city = next_cityself.move_count += 1# 搜索路径def search_path(self):# 初始化数据self.__clean_data()# 搜素路径,遍历完所有城市为止while self.move_count < city_num:# 移动到下一个城市next_city = self.__choice_next_city()self.__move(next_city)# 计算路径总长度self.__cal_total_distance()#----------- TSP问题 -----------class TSP(object):def __init__(self, root, width = 800, height = 600, n = city_num):# 创建画布self.root = root self.width = width self.height = height# 城市数目初始化为city_numself.n = n# tkinter.Canvasself.canvas = tkinter.Canvas(root,width = self.width,height = self.height,bg = "#EBEBEB", # 背景白色 xscrollincrement = 1,yscrollincrement = 1)self.canvas.pack(expand = tkinter.YES, fill = tkinter.BOTH)self.title("TSP蚁群算法(n:初始化 e:开始搜索 s:停止搜索 q:退出程序)")self.__r = 5self.__lock = threading.RLock() # 线程锁self.__bindEvents()self.new()# 计算城市之间的距离for i in range(city_num):for j in range(city_num):temp_distance = pow((distance_x[i] - distance_x[j]), 2) + pow((distance_y[i] - distance_y[j]), 2)temp_distance = pow(temp_distance, 0.5)distance_graph[i][j] =float(int(temp_distance + 0.5))# 按键响应程序def __bindEvents(self):self.root.bind("q", self.quite) # 退出程序self.root.bind("n", self.new) # 初始化self.root.bind("e", self.search_path) # 开始搜索self.root.bind("s", self.stop) # 停止搜索# 更改标题def title(self, s):self.root.title(s)# 初始化def new(self, evt = None):# 停止线程self.__lock.acquire()self.__running = Falseself.__lock.release()self.clear() # 清除信息 self.nodes = [] # 节点坐标self.nodes2 = [] # 节点对象# 初始化城市节点for i in range(len(distance_x)):# 在画布上随机初始坐标x = distance_x[i]y = distance_y[i]self.nodes.append((x, y))# 生成节点椭圆,半径为self.__rnode = self.canvas.create_oval(x - self.__r,y - self.__r, x + self.__r, y + self.__r,fill = "#ff0000", # 填充红色outline = "#000000", # 轮廓白色tags = "node",)self.nodes2.append(node)# 显示坐标self.canvas.create_text(x,y-10, # 使用create_text方法在坐标(302,77)处绘制文字text = '('+str(x)+','+str(y)+')', # 所绘制文字的内容fill = 'black' # 所绘制文字的颜色为灰色)# 顺序连接城市#self.line(range(city_num))# 初始城市之间的距离和信息素for i in range(city_num):for j in range(city_num):pheromone_graph[i][j] = 1.0self.ants = [Ant(ID) for ID in range(ant_num)] # 初始蚁群self.best_ant = Ant(-1) # 初始最优解self.best_ant.total_distance = 1 << 31 # 初始最大距离self.iter = 1 # 初始化迭代次数 # 将节点按order顺序连线def line(self, order):# 删除原线self.canvas.delete("line")def line2(i1, i2):p1, p2 = self.nodes[i1], self.nodes[i2]self.canvas.create_line(p1, p2, fill = "#000000", tags = "line")return i2# order[-1]为初始值reduce(line2, order, order[-1])# 清除画布def clear(self):for item in self.canvas.find_all():self.canvas.delete(item)# 退出程序def quite(self, evt):self.__lock.acquire()self.__running = Falseself.__lock.release()self.root.destroy()print (u"\n程序已退出...")sys.exit()# 停止搜索def stop(self, evt):self.__lock.acquire()self.__running = Falseself.__lock.release()# 开始搜索def search_path(self, evt = None):# 开启线程self.__lock.acquire()self.__running = Trueself.__lock.release()while self.__running:# 遍历每一只蚂蚁for ant in self.ants:# 搜索一条路径ant.search_path()# 与当前最优蚂蚁比较if ant.total_distance < self.best_ant.total_distance:# 更新最优解self.best_ant = copy.deepcopy(ant)# 更新信息素self.__update_pheromone_gragh()print (u"迭代次数:",self.iter,u"最佳路径总距离:",int(self.best_ant.total_distance))# 连线self.line(self.best_ant.path)# 设置标题self.title("TSP蚁群算法(n:随机初始 e:开始搜索 s:停止搜索 q:退出程序) 迭代次数: %d" % self.iter)# 更新画布self.canvas.update()self.iter += 1# 更新信息素def __update_pheromone_gragh(self):# 获取每只蚂蚁在其路径上留下的信息素temp_pheromone = [[0.0 for col in range(city_num)] for raw in range(city_num)]for ant in self.ants:for i in range(1,city_num):start, end = ant.path[i-1], ant.path[i]# 在路径上的每两个相邻城市间留下信息素,与路径总距离反比temp_pheromone[start][end] += Q / ant.total_distancetemp_pheromone[end][start] = temp_pheromone[start][end]# 更新所有城市之间的信息素,旧信息素衰减加上新迭代信息素for i in range(city_num):for j in range(city_num):pheromone_graph[i][j] = pheromone_graph[i][j] * RHO + temp_pheromone[i][j]# 主循环def mainloop(self):self.root.mainloop()
#----------- 程序的入口处 -----------
if __name__ == '__main__':TSP(tkinter.Tk()).mainloop()
运行结果:
心得体会:
这份 MATLAB 代码是一个遗传算法用于解决 TSP 问题(旅行商问题)。TSP 问题是一个 NP 难问题,因此采用遗传算法来寻找最优解是一种较为常用的方法。
通过这次综合性实验,我深刻体会到了计算智能的强大。遗传算法作为一种进化计算方法,在优化问题上具有很好的表现。它将问题转化为一个个体的群体进化问题,通过适应度选择、交叉和变异等操作不断地寻找更优解。同时,对于复杂的问题,我们可以通过多次迭代来获得更优秀的结果。
此外,在这次实验的实现过程中,还用到了矩阵运算和图形绘制等模块,这些都是 MATLAB 在科学计算和工程领域中非常有用的功能。同时计算智能也能够提供一种新的思维方式。在复杂的问题中,通过计算智能的群体智能和进化算法求解,我们能够寻找出最优解决方案,并获得更深入的认识。这也为我们的创造力和创新精神提供了更多的空间和机会。
总的来说,计算智能是一个非常重要的领域,它涵盖了许多优化问题的求解方法,为人类的决策提供了新的思路和工具。在学习这门课的过程中,我认识到了它的广泛性和实用性,也更加深入地理解了其中的理论基础和方法实现。