网上有个使用一个单点激光笔,一个电机和普通USB摄像头做的一个激光雷达。这里简单介绍一下它的原理。
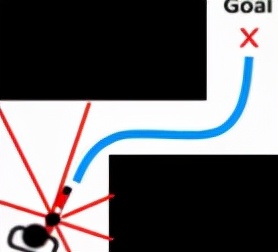
原理上来说,这也是一个三角测距激光雷达,和rplidar的原理本质是一样的。设计如图所示,

然后需要使用图像算法去检查这些激光光点。当然最好的方法是加一块滤光片,只让激光的光谱通过,其他的都滤除。由于电机旋转,光点在平面上会变成线状。
不过使用激光笔做的激光雷达对人眼可能不太安全。转速太快,不容易捕捉到,太慢,容易对人眼造成伤害。
网上有个使用一个单点激光笔,一个电机和普通USB摄像头做的一个激光雷达。这里简单介绍一下它的原理。
原理上来说,这也是一个三角测距激光雷达,和rplidar的原理本质是一样的。设计如图所示,
然后需要使用图像算法去检查这些激光光点。当然最好的方法是加一块滤光片,只让激光的光谱通过,其他的都滤除。由于电机旋转,光点在平面上会变成线状。
不过使用激光笔做的激光雷达对人眼可能不太安全。转速太快,不容易捕捉到,太慢,容易对人眼造成伤害。