目录
.1 简介
1.1 urdf概述
编辑 1.2 导出urdf为可用的xml编辑
1.3 导出测试编辑
.2 修改
2.1 添加平面和物体
2.2 关节修改
2.2.1 group
2.2.2 关节修改
2.2.3 关节
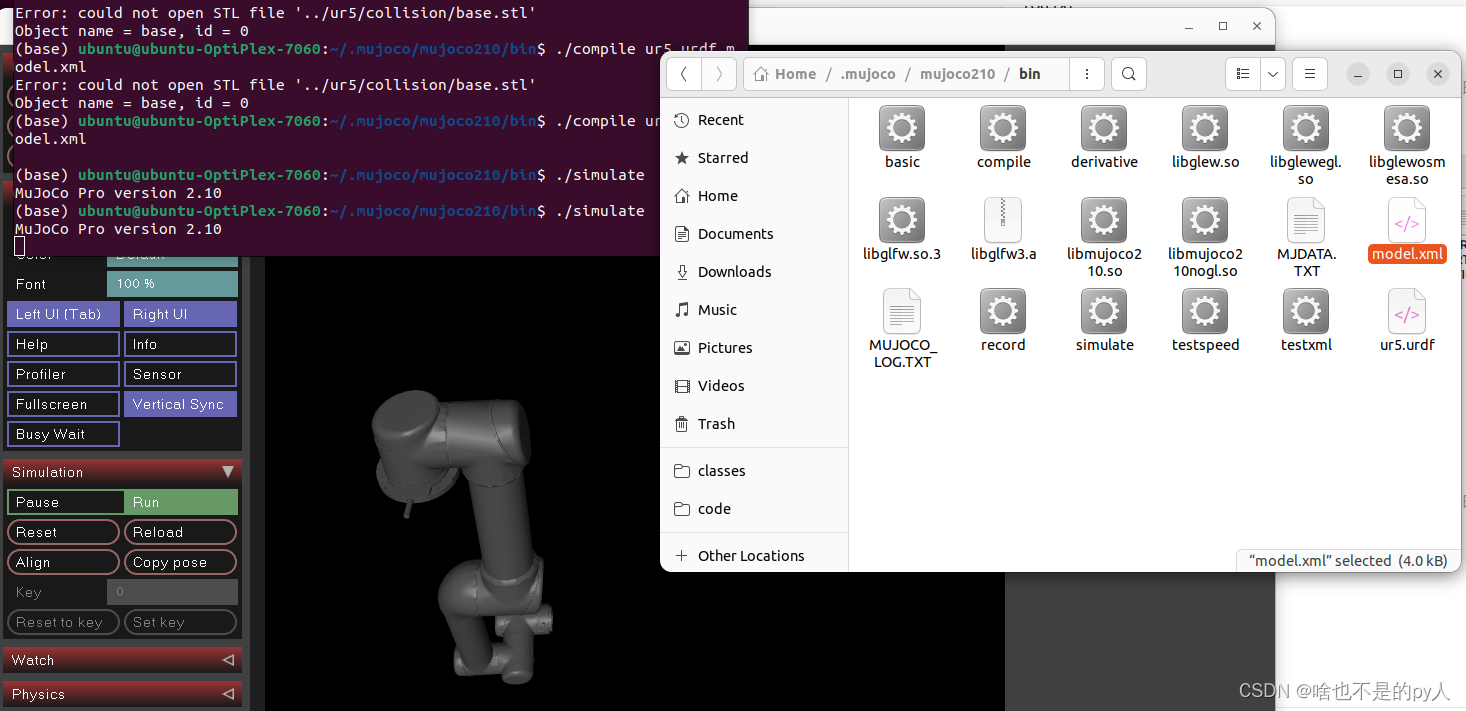
解压提供的ur5后
修改compiler的 meshdir路径
<mujoco model="ur5"><compiler angle="radian" meshdir="/home/ubuntu/code/test_mujoco/xml/ur5/ur5/collision" />
.1 简介
1.1 urdf概述


 1.2 导出urdf为可用的xml
1.2 导出urdf为可用的xml

使用以上命令即可转换


1.3 导出测试


导出success 可以使用
其他参考

.2 修改
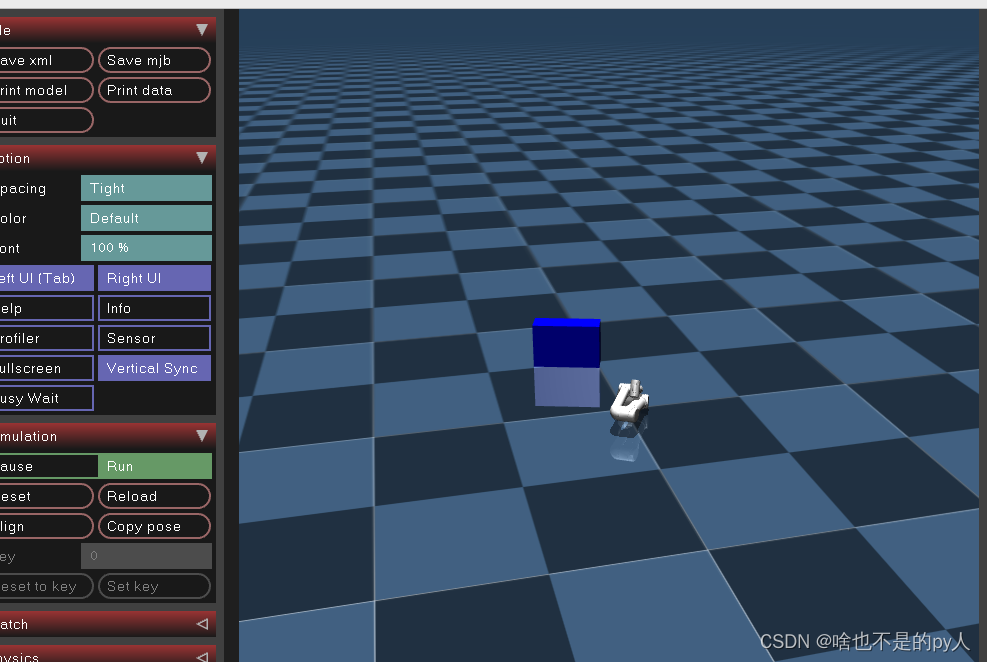
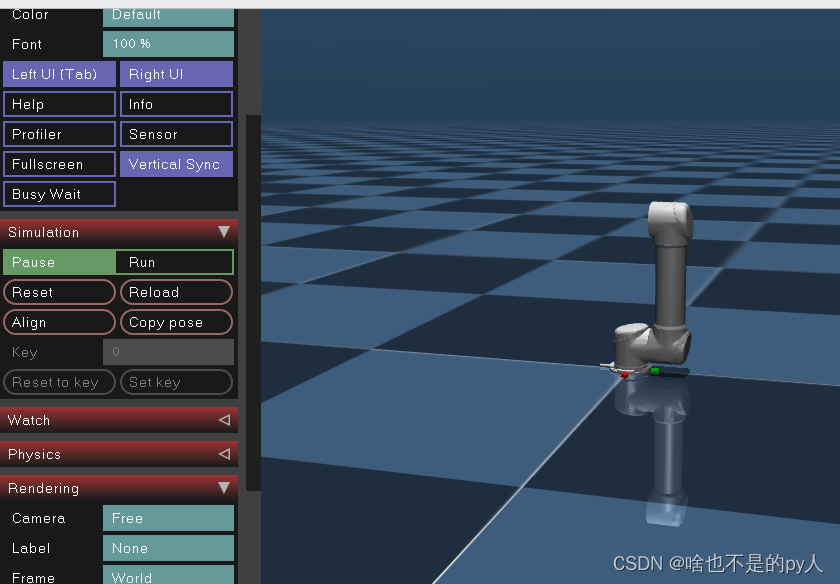
2.1 添加平面和物体
添加平面和物体

然后使用
<include file>即可

顺手又加了一个物体,效果如下

2.2 关节修改
2.2.1 group


geom里设置为一个group就只有一个mass


2.2.2 关节修改
注释掉其他关节就留一个

修改后
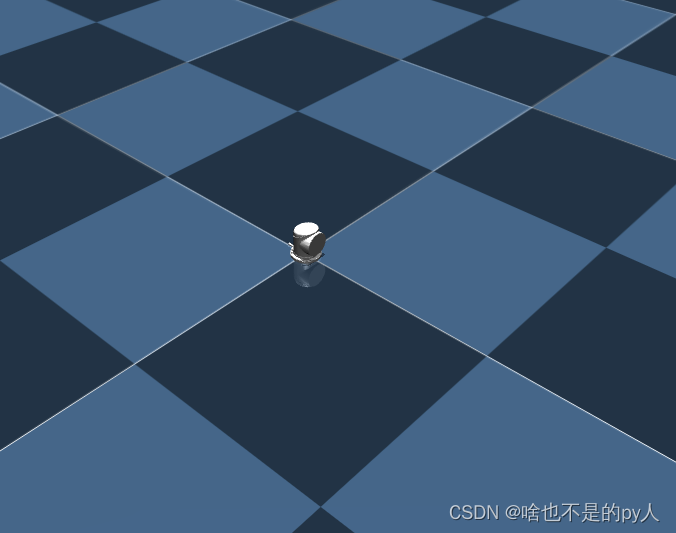
添加一个关节



最上面两行是底座注释掉之后

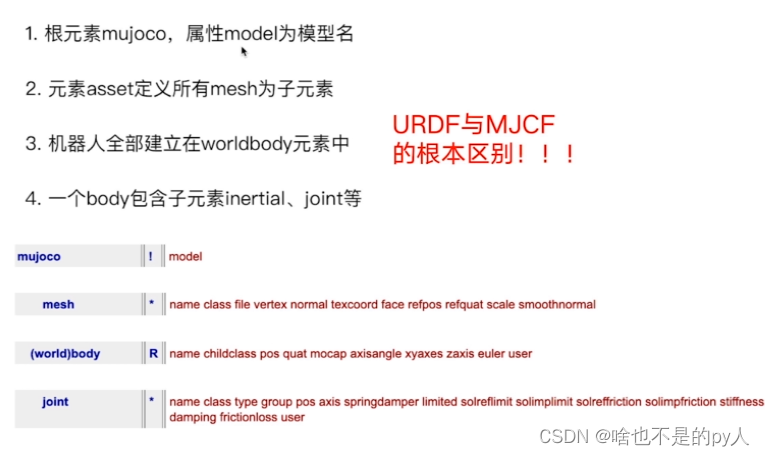
2.2.3 关节

定义了可动的旋转轴以及旋转范围还有关节相对于pos的位置
quat
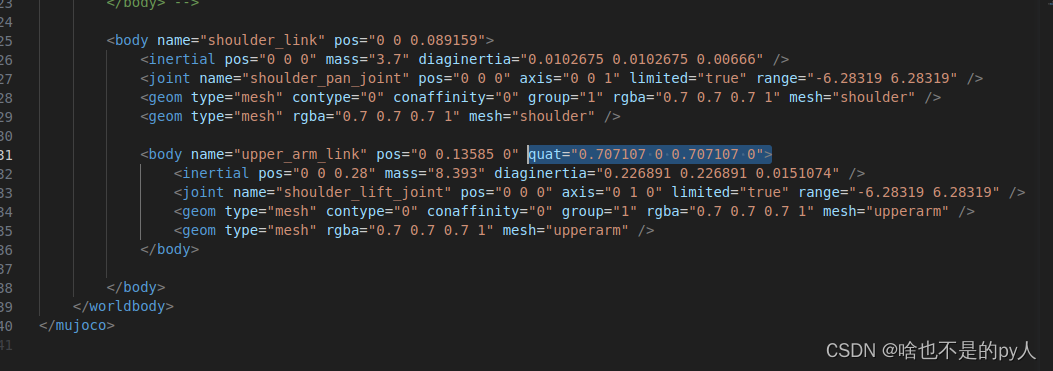
对应空转时的旋转值
上图的四元数代表绕y轴旋转90度也就是说初始化的时候绕y轴空转90度


可以看到修改后空转姿态改变