tb6612电机驱动软件开发(cubeide工程调试,引脚等设置)
文章目录
- tb6612电机驱动软件开发(cubeide工程调试,引脚等设置)
- CLOCK(RCC)
- SYS
- GPIO
- NVIC
- Timer定时器配置
- PWM输出设置电机转速
- 定时器编码模式
- 普通定时器
- UART串口设置
CLOCK(RCC)
设置外部时钟源

High Speed Clock即为HSE(高速时钟源),一般为接外部晶振为主,因此选择Crystal/Ceramic Resonator(使用晶振/外部陶瓷振荡器)来使用外部晶振。
Low Speed Clock(低速时钟源),若无特殊需求,不用打开。
然后设置时钟频率
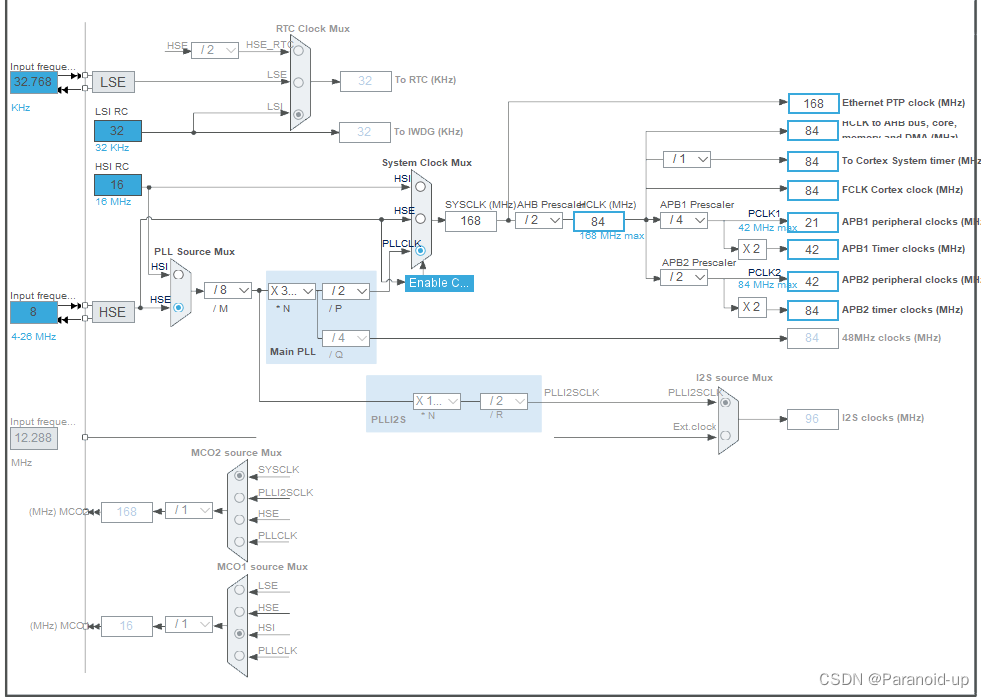
设置输入时钟源频率
此图片频率84为方便讲解设置,实际还是按使用频84MHZ来设置!
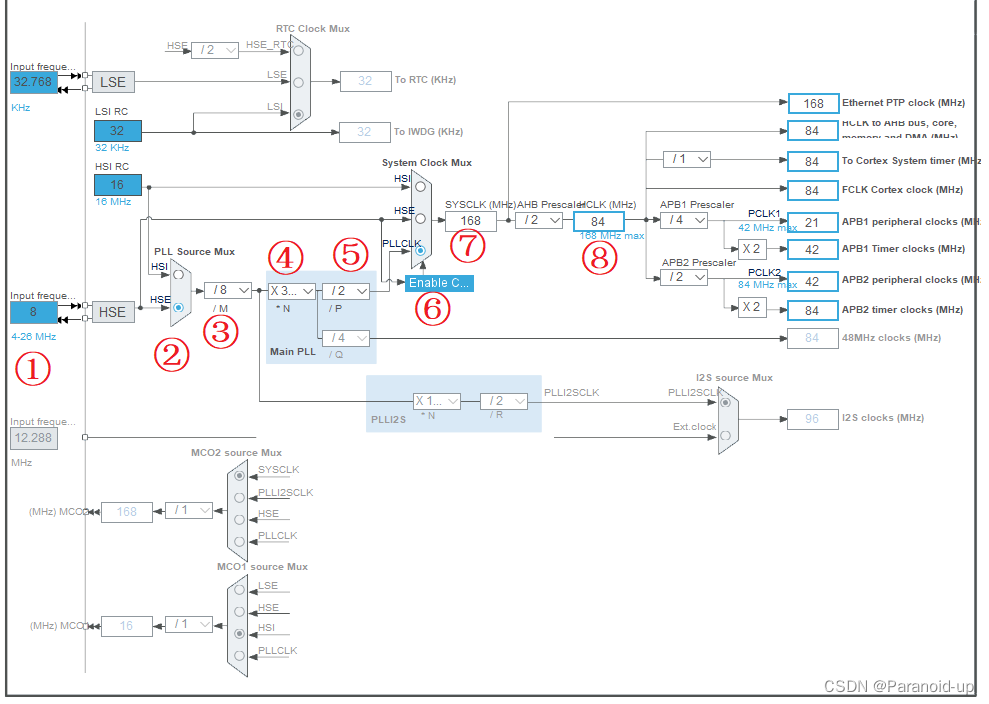
①:Input frequency:输入晶振频率,在这个选项中可根据单片机的外部晶振来填写晶振频率,下面的蓝色范围为可接受频率范围。这边按8MHZ来配。
②:PLL source Mux:PLL时钟源选择器,选择HSE高速时钟源即可。
③:PLL 分频系数 M 配置。由于我们需要系统时钟设为168MHZ,因此需要通过PLL分频来把8MHZ的晶振时钟转换为系统时钟。
④:主 PLL 倍频系数 N 配置。倍频系数 N(自动配频会自动计算)
⑤:主 PLL 分频系数 P 配置。分频系数 P(自动配频会自动计算)
⑥:系统时钟时钟源选择,选择PLLCLK,系统时钟就会和PLL同步为168MHZ
⑦,⑧:SYSCLK系统时钟,引脚的工作频率都由它分频来配置。
系统时钟分频得到的总线时钟:AHB(Advanced High performance Bus,高级高性能总线,用于高性能模块CPU、DMA、DSP之间的连接)、APB1、APB2、APB3和APB总线时钟(Advanced Peripheral Bus,高性能外围总线,用于低带宽的周边外设之间的连接,例如UART)以及Systick时钟的最终来源都是系统时钟SYSCLK。
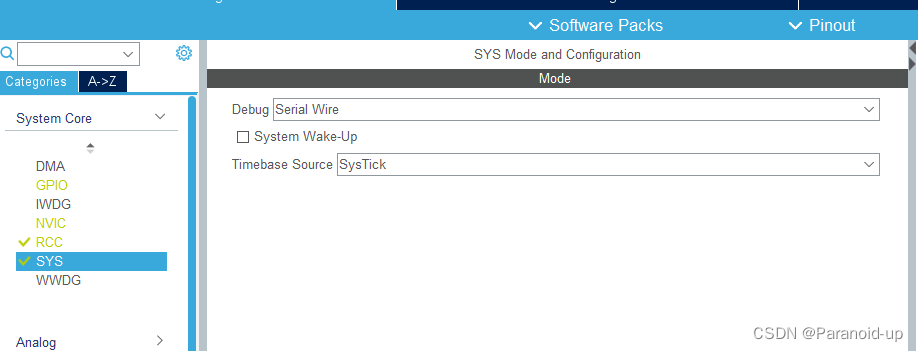
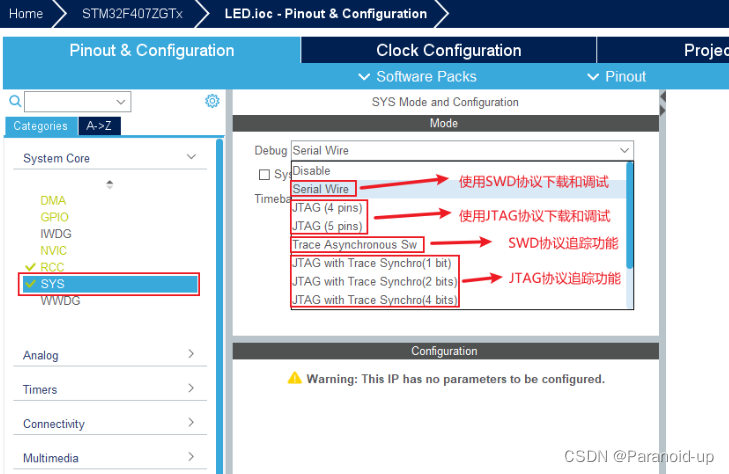
SYS
GPIO
PB10,PB11,PB12,PB13设置为输出,高速模式
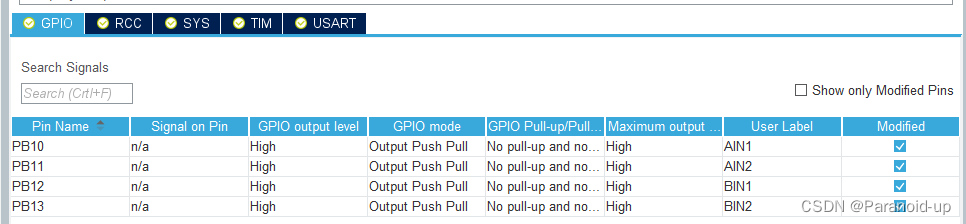
用于连接电机的电机A电机输出端1,A电机输出端2,B电机输出端2,B电机输出端1来控制电机的正反转。

NVIC
设置将设置NVIC的分组为2,并设置抢占优先级和相应优先级。

软件设置高低电平
/* tb6612 A电机输入端1*/
#define AIN1(x) do{ x ? \HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_SET) : \HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_RESET); \}while(0) /* AIN1 *//* tb6612 A电机输入端2*/
#define AIN2(x) do{ x ? \HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN2_Pin, GPIO_PIN_SET) : \HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN2_Pin, GPIO_PIN_RESET); \}while(0) /* AIN2 *//* tb6612 B电机输入端1*/
#define BIN1(x) do{ x ? \HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET) : \HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_RESET); \}while(0) /* BIN1 *//* tb6612 B电机输入端2*/
#define BIN2(x) do{ x ? \HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_SET) : \HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET); \}while(0) /* BIN2 */
Timer定时器配置
PWM输出设置电机转速
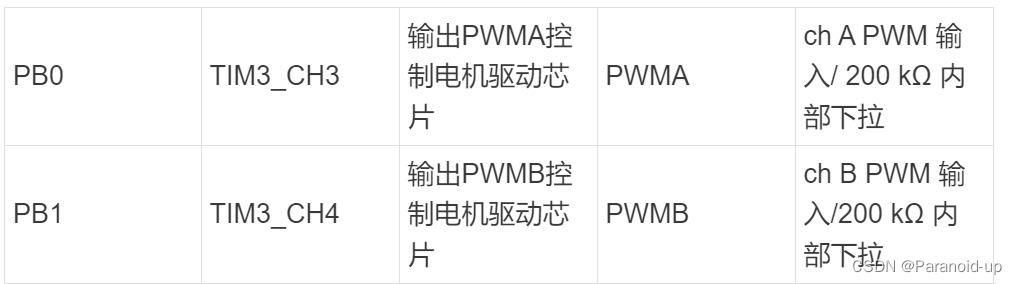
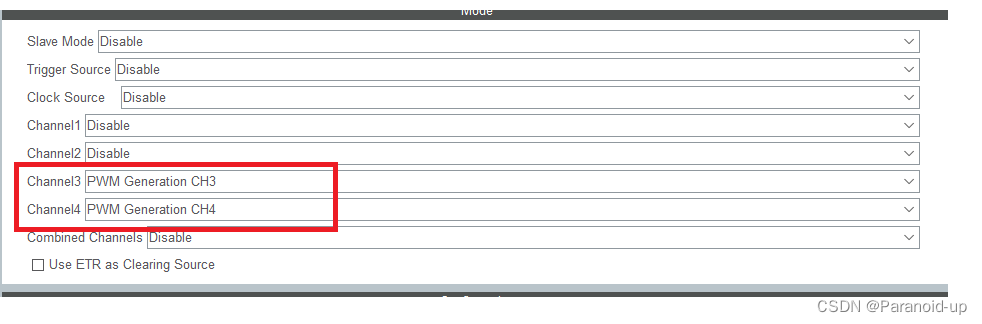
TIM3作为PWM的产生定时器,在“TIM3”界面将“Clock Source”,clock source不设置为“Internal Clock”内部时钟,再将定时器3通道3与通道4设为“PWM Genration CH4”。
接着进入TIM3的配置设置中(没显示出来的注意去刷新系统时钟)
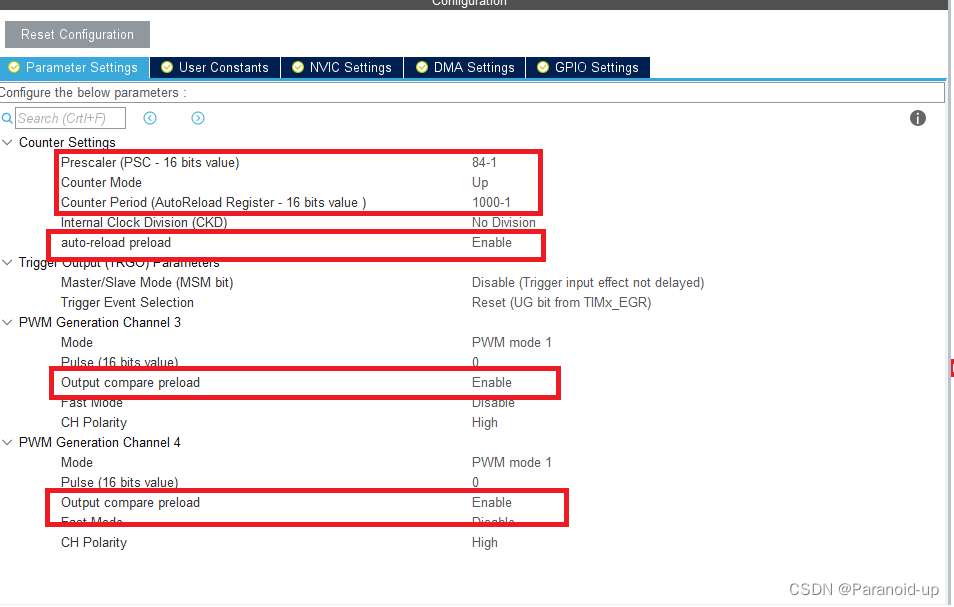
将系统分频设为84-1,得到1KHZ频率,将计数设为1000得到1000us的PWM周期。
频率 = 定时器时钟 / (Prescaler 预分频 + 1) / (Counter Period 计数值 + 1) Hz
占空比 = Pulse ( 对比值) / (C ounter Period 计数值) %
同时开启自动重载防止定时器溢出。
定时器对应软件设置
开启定时器
HAL_TIM_Base_Start_IT(&htim7);HAL_TIM_Base_Start_IT(&htim6);
使能定时器输出
/* 使能输出 */HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3) //PWM1 PB0HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4) //PWM2 PB1
设置占空比
/* 设置速度(占空比) */__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3,ChannelPulse) // 设置比较寄存器的值__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_4,ChannelPulse) // 设置比较寄存器的值
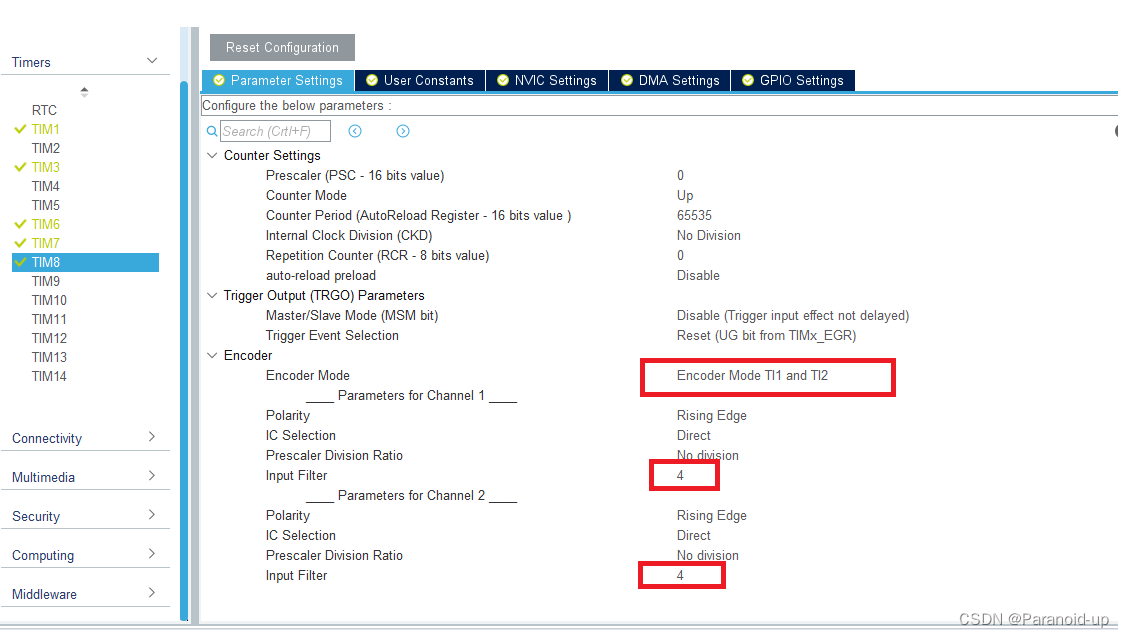
定时器编码模式
PC6TIM8_CH1定时器自带编码引脚获取电机脉冲PC7TIM8_CH2定时器自带编码引脚获取电机脉冲PE9TIM1_CH1定时器自带编码引脚获取电机脉冲PE11TIM1_CH2定时器自带编码引脚获取电机脉冲

设置定时器为编码模式
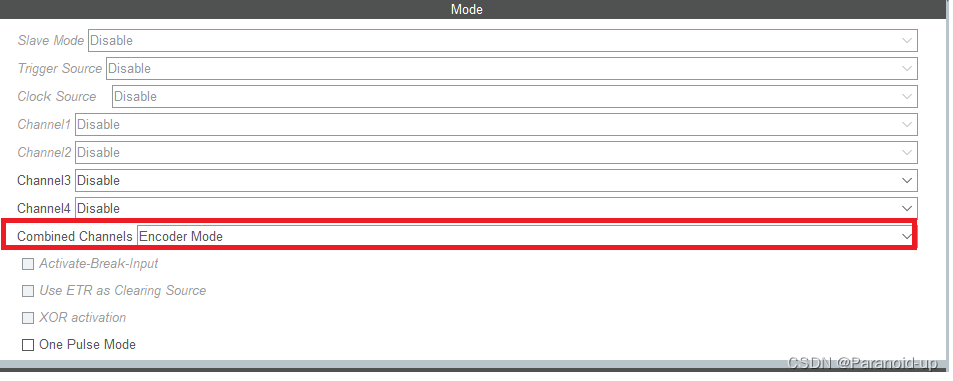
设置为上升沿,下降沿触发,设置滤波系数4(滤波可不需要)
对应软件设置
开启TIM3和8的编码器接口模式
HAL_TIM_Encoder_Start(&htim1, TIM_CHANNEL_ALL); //开启TIM3的编码器接口模式HAL_TIM_Encoder_Start(&htim8, TIM_CHANNEL_ALL); //开启TIM8的编码器接口模式
获取计数值
__HAL_TIM_GET_COUNTER(&htim1);//获取计数器值__HAL_TIM_GET_COUNTER(&htim8);//获取计数器值
计数器清零
__HAL_TIM_SET_COUNTER(&htim1,0);//TIM1计数器清零__HAL_TIM_SET_COUNTER(&htim8,0);//TIM8计数器清零
普通定时器
定时器7,20ms触发一次,每次触发执行对应的回调函数,用于重置获取的编码脉冲数
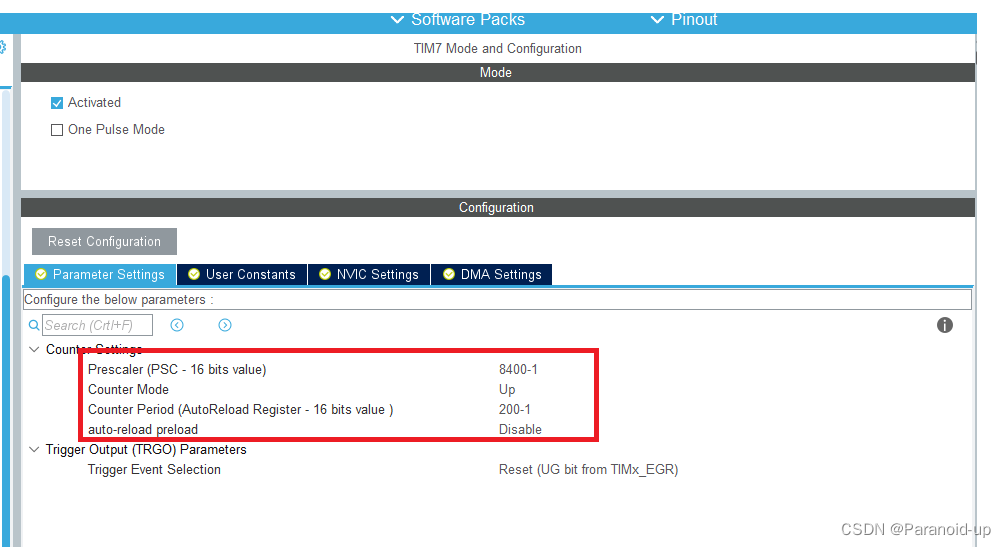
定时器6,1s触发一次,用于查看软件是否卡死等情况

使能定时器中断
TIM6

TIM7
设置中断优先级

软件设置
开启定时器
HAL_TIM_Base_Start_IT(&htim7);HAL_TIM_Base_Start_IT(&htim6);
定时器回调函数HAL_TIM_PeriodElapsedCallback
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{/* Prevent unused argument(s) compilation warning */UNUSED(htim);if(htim == &htim7){GetMotorPulse();Motor_left_journey_cm = ( g_lMotor_left_PulseSigma /(REDUCTION_RATIO*ENCODER_TOTAL_RESOLUTION)) * (2*WheelR*3.1416);Motor_right_journey_cm = ( g_lMotor_right_PulseSigma /(REDUCTION_RATIO*ENCODER_TOTAL_RESOLUTION)) * (2*WheelR*3.1416);/*****上位机pid调试速度话用,实际运行时注释掉*****//** 左边电机调试,最终调试后* P=0.7* I=0.85* D=0*/Motor_left_PWM = speed_left_pid_control();if (Motor_left_PWM >= 0) // 判断电机方向{move_left_forward(); //正方向要对应}else{Motor_left_PWM = -Motor_left_PWM;move_left_backward(); //正方向要对应}speed_set_left_motor(Motor_left_PWM);/** 右边电机调试,最终调试后* P=0.967* I=0.910* D=0.567*/
// Motor_right_PWM = speed_right_pid_control();
// if (Motor_right_PWM >= 0) // 判断电机方向
// {
// move_right_forward(); //正方向要对应
// }else{
// Motor_right_PWM = -Motor_right_PWM;
// move_right_backward(); //正方向要对应
// }
// speed_set_right_motor(Motor_right_PWM);/******//******上位机调试位置速度串级PID时用,实际使用时注释掉******/// Location_Speed_control();
// //set_computer_value(SEND_FACT_CMD, CURVES_CH1, &g_lMotor_left_PulseSigma, 1);
// //set_computer_value(SEND_FACT_CMD, CURVES_CH2, &g_lMotor_right_PulseSigma, 1);
// Motor_left_PWM = speed_left_Outval;
printf("Motor_left_PWM = %f\r\n",Motor_left_PWM);
// Motor_right_PWM = speed_right_Outval;
printf("Motor_right_PWM = %f\r\n",Motor_right_PWM);
// MotorOutput(Motor_left_PWM,Motor_right_PWM);}else if(htim == (&htim6)) { //1s进入一次TIM6的中断}/* NOTE : This function should not be modified, when the callback is needed,the HAL_TIM_PeriodElapsedCallback could be implemented in the user file*/
}
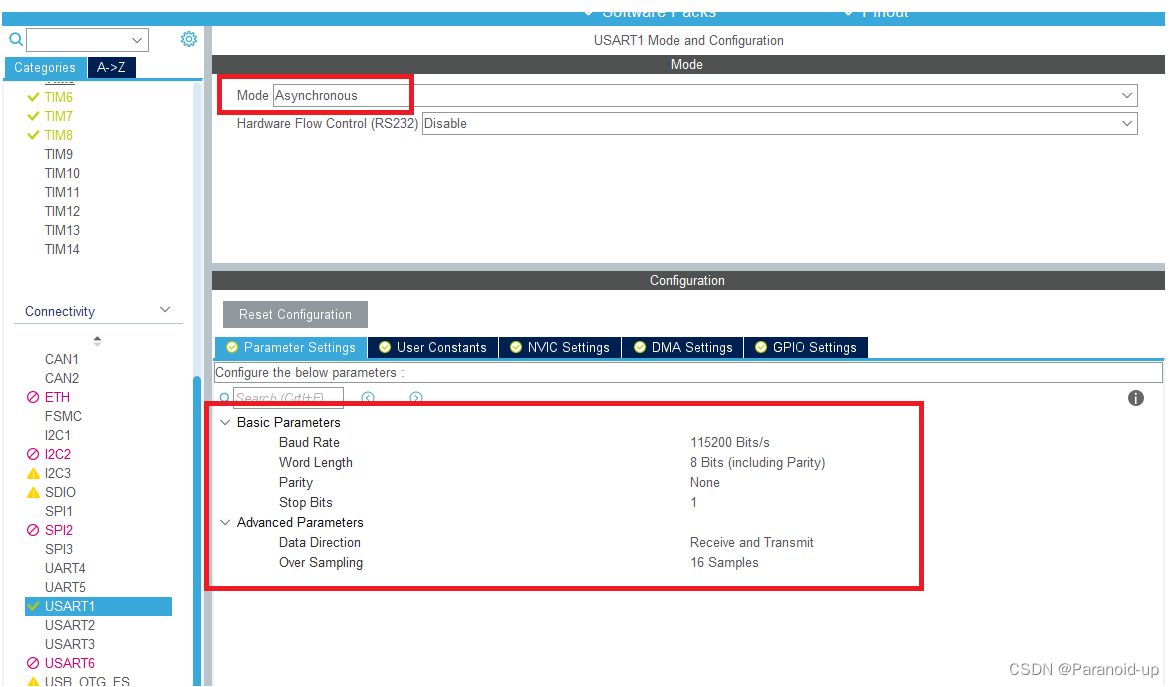
UART串口设置
在“Mode”一栏中,将“Mode”改为“Asychoronous”异步模式,其他选项不用改动。
可以看到下方会出现串口的详细配置目录,这边选择不改动,使用默认的:
115200HZ波特率,8字符长度,奇偶位None,停止位为1.
接着点击“NVIC Setting”对串口中断进行配置,打开USART1的中断开关。

并在“NVIC”总中断控制界面将串口中断的优先度设为“3,3”。

软件设置
打开串口中断接收
HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, 1); //打开串口中断接收
设置中断服务函数
void USART1_IRQHandler(void)
{/* USER CODE BEGIN USART1_IRQn 0 */uint32_t timeout = 0;uint32_t maxDelay = 0x1FFFF;protocol_data_recv(g_rx_buffer, 1);/* USER CODE END USART1_IRQn 0 */HAL_UART_IRQHandler(&huart1);/* USER CODE BEGIN USART1_IRQn 1 */timeout = 0;while (HAL_UART_GetState(&huart1) != HAL_UART_STATE_READY) /* 等待就绪 */{timeout++; /* 超时处理 */if(timeout > maxDelay){break;}}timeout=0;while (HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, RXBUFFERSIZE) != HAL_OK){timeout++; /* 超时处理 */if (timeout > maxDelay){break;}}//__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);/* USER CODE END USART1_IRQn 1 */
}
设置串口接收中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == USART1) /* 接收未完 */{if((g_usart_rx_sta & 0x8000) == 0) /* 接收到了0x0d */{if(g_usart_rx_sta & 0x4000) /* 接收到了0x0d */{if(g_rx_buffer[0] != 0x0a){g_usart_rx_sta = 0; /* 接收错误,重新 */}else{g_usart_rx_sta |= 0x8000; /* 接收完成 */}}else{ /* 还没收到0X0D */if(g_rx_buffer[0] == 0x0d){g_usart_rx_sta |= 0x4000;}else{cp_g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0] ;g_usart_rx_sta++;if(g_usart_rx_sta > (USART_REC_LEN - 1)){g_usart_rx_sta = 0; /* 接收数据错误,重新 */}}}}// protocol_data_recv(g_rx_buffer, 1);if (g_usart_rx_sta & 0x8000) {memcpy(g_usart_rx_buf, cp_g_usart_rx_buf, USART_REC_LEN);memset(cp_g_usart_rx_buf, 0, USART_REC_LEN);g_usart_rx_sta = 0;}}
}
串口接收与发送操作函数
/* IO operation functions *******************************************************/
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_DMAPause(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_DMAResume(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_DMAStop(UART_HandleTypeDef *huart);
/* Transfer Abort functions */
HAL_StatusTypeDef HAL_UART_Abort(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortTransmit(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortReceive(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_Abort_IT(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortTransmit_IT(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortReceive_IT(UART_HandleTypeDef *huart);void HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortTransmitCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortReceiveCpltCallback(UART_HandleTypeDef *huart);
这些函数是用于串行通信中的UART(通用异步收发器)操作的函数。
HAL_UART_Transmit: 用于通过UART发送数据。它接收UART句柄指针 huart,数据缓冲区指针 pData,数据长度 Size 和超时时间 Timeout。
HAL_UART_Receive: 用于通过UART接收数据。它接收UART句柄指针 huart,数据缓冲区指针 pData,数据长度 Size 和超时时间 Timeout。
HAL_UART_Transmit_IT: 用于以中断方式通过UART发送数据。与 HAL_UART_Transmit 类似,但不会阻塞主程序的执行。
HAL_UART_Receive_IT: 用于以中断方式通过UART接收数据。与 HAL_UART_Receive 类似,但不会阻塞主程序的执行。
HAL_UART_Transmit_DMA: 用于通过DMA(直接存储器访问)方式通过UART发送数据。这种方法可以实现高效的数据传输,减少CPU的负载。
HAL_UART_Receive_DMA: 用于通过DMA方式通过UART接收数据。与 HAL_UART_Transmit_DMA 类似,但用于接收数据。
HAL_UART_DMAPause: 暂停通过DMA方式传输数据。
HAL_UART_DMAResume: 恢复通过DMA方式传输数据。
HAL_UART_DMAStop: 停止通过DMA方式传输数据。
HAL_UART_Abort: 中止UART通信,停止传输并释放相关资源。
HAL_UART_AbortTransmit: 中止UART发送操作。
HAL_UART_AbortReceive: 中止UART接收操作。
HAL_UART_Abort_IT: 以中断方式中止UART通信。
HAL_UART_AbortTransmit_IT: 以中断方式中止UART发送操作。
HAL_UART_AbortReceive_IT: 以中断方式中止UART接收操作。
上述函数提供了灵活的UART数据传输和操作控制功能,适用于各种应用场景。通过这些函数,可以发送和接收数据,使用不同的传输方式(阻塞、中断、DMA),以及中止或暂停数据传输。此外,还提供了一些回调函数,以便在特定事件发生时进行处理,如传输完成、接收完成、错误处理等。