说在前面
我们也很久没有更新数据结构系列了,半年前博主重新深入学习了红黑树这个数据结构,一直想更新呈现给大家,最近也一直没有时间,今天红黑树它来了!
博主为了这篇博客,做了很多准备,试了很多画图软件,就是为了让大家看得明白!希望大家不要吝啬一键三连啊!!
前言
那么这里博主先安利一下一些干货满满的专栏啦!
手撕数据结构![]() https://blog.csdn.net/yu_cblog/category_11490888.html?spm=1001.2014.3001.5482
https://blog.csdn.net/yu_cblog/category_11490888.html?spm=1001.2014.3001.5482算法专栏![]() https://blog.csdn.net/yu_cblog/category_11464817.html
https://blog.csdn.net/yu_cblog/category_11464817.html
STL源码剖析![]() https://blog.csdn.net/yu_cblog/category_11983210.html?spm=1001.2014.3001.5482
https://blog.csdn.net/yu_cblog/category_11983210.html?spm=1001.2014.3001.5482
什么是红黑树?
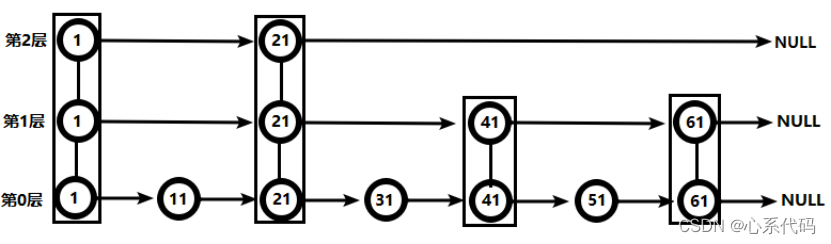
在学习红黑树之前,我们必须先了解和熟悉AVL树:
万字手撕AVL树 | 上百行的旋转你真的会了吗?【超用心超详细图文解释 | 一篇学会AVL】![]() https://blog.csdn.net/Yu_Cblog/article/details/127698306?spm=1001.2014.3001.5501红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出2倍,因而是接近平衡的。
https://blog.csdn.net/Yu_Cblog/article/details/127698306?spm=1001.2014.3001.5501红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出2倍,因而是接近平衡的。

因此,红黑树不是直接通过检验【没有一条路径会比其他路径长出2倍】而维护平衡的,而是通过对根到叶子路径上节点的着色的限制!它不是像AVL一样直接控制平衡,而是间接控制平衡。
红黑树的性质
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均 包含相同数目的黑色结点
- 每个叶子结点都是黑色的(此处的叶子结点指的是空结点(NIL节点))
红黑树节点结构
同样,红黑树也是使用三叉链进行构造
enum Colour {RED,BLACK
};
template<class K,class V>
struct __Red_Black_TreeNode {__Red_Black_TreeNode<K, V>* _left;__Red_Black_TreeNode<K, V>* _right;__Red_Black_TreeNode<K, V>* _parent;pair<K, V>_kv;Colour _col;__Red_Black_TreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv) {}
};
红黑树的插入(重点)
首先插入节点,前面的部分和搜索树和AVL一样,找位置插入即可:
bool insert(const pair<K, V>& kv) {if (_root == nullptr) {_root = new Node(kv);_root->_col = BLACK;return true;}Node* parent = nullptr;Node* cur = _root;while (cur) {if (cur->_kv.first < kv.first) {parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first) {parent = cur;cur = cur->_left;}else return false;}cur = new Node(kv);cur->_col = RED;//一开始尽量先变红if (parent->_kv.first < kv.first) {parent->_right = cur;}else {parent->_left = cur;}cur->_parent = parent;//判断是否需要调整颜色或旋转while (...) {//...}//根据规则,最后的根节点一定是黑色的_root->_col = BLACK;//最后无论根是红是黑 -- 都处理成黑return true;}在插入这部分,我们要牢牢记住红黑树的两个规则,这是我们插入节点最根本的根据!
- 规则三:如果一个节点是红色的,那它的孩子是黑色的
- 规则四:对于每一个节点,从该节点到其所有后代叶子节点的简单路径上,均包含相同数目的黑色节点
插入的新节点默认是红色
现在我们要插入一个新的节点
我们可以分为两种情况:
- 插入节点的父亲是黑色的
- 插入节点的父亲是红色的
如果插入节点的父亲是黑色的,我们插入黑色节点就会违反规则4,插入红节点并不违反规则,所以我们应该插入的节点应该设置成红色。
如果插入节点的父亲是红色的,我们插入黑色节点就会违反规则4,插入红节点违反规则3。此时我们应该插入什么颜色的节点呢?
答案是我们应该插入红色节点,再做后续的变色工作。
原因:如果插入黑色节点,我们违反规则4,相当于整棵树违法了规则。而我们违反规则3,我们可以通过局部的调整颜色或者旋转解决问题,因此我们选择先把新节点设置成红色,再做变色(+旋转)的处理。
因此,在红黑树中插入一个新节点,无论什么情况,先设置成红色!

变色和旋转
当我们插入一个红节点之后,我们就要检查这颗红黑树是否符合规则了。
如果插入节点的父亲是黑色,是不违反红黑树规则的,我们不需要做处理。
下面我们重点讨论:插入节点的父亲为红色的情况。
红黑树处理情况分类所要关注的节点:父亲、祖父和叔叔(叔叔为父亲的兄弟节点)
我们把握好父亲祖父和叔叔,就能处理红黑树的所有状况。其中,叔叔的颜色最为关键!
下面是红黑树调整的三种情况:
约定cur为当前节点,p为父亲节点,g为祖父节点,u为叔叔节点。
情况一:cur为红,p为红,g为黑,u存在且为红
处理如下:
tips:我们可以发现,这个情况是不需要看左右的,cur在p的左或右,处理的方式其实都是一样的。
情况二: cur为红,p为红,g为黑,u不存在/u为黑(且cur,p,g在同一直线上)
在情况一中,我们把父亲变黑的时候,可以把叔叔一起拉下水,让叔叔也变黑,这样我们就能保证路径上的黑色节点个数保持一致。
但是现在,叔叔不存在或叔叔已经是黑色的了,此时只能旋转了。

说明: u的情况有两种
- 如果u节点不存在,则cur一定是新插入节点,因为如果cur不是新插入节点则cur和p一定有一个节点的颜色是黑色,就不满足性质4: 每条路径黑色节点个数相同
- 如果u节点存在,则其一定是黑色的,那么cur节点原来的颜色一定是黑色的现在看到其是红色的原因是因为cur的子树在调整的过程中将cur节点的颜色由黑色改成红色。
p为g的左孩子,cur为p的左孩子,则进行右单旋转;
相反,p为g的右孩子,cur为p的右孩子,则进行左单旋转
p、g变色--p变黑,g变红
因为cur,p,g在同一直线上,所以情况二只需要单旋!下面这种情况就需要双旋了!
情况三: cur为红,p为红,g为黑,u不存在/u为黑(且cur,p,g不在同一直线上)

p为g的左孩子,cur为p的右孩子,则针对p做左单旋转;相反,
p为g的右孩子,cur为p的左孩子,则针对p做右单旋转
则转换成了情况2
红黑树的删除等
讲到这里有伙伴可能会问,为什么讲红黑树,不讲删除那些接口呢?
因为,校招,公司面试,以后工作中都基本不会考察到AVL树和红黑树的删除接口,我们只需要掌握插入接口就行了。
AVL树,红黑树我们都是做了解性学习,我们并不需要去手撕它的全部代码,这样时间成本很大,意义不大.我们学习红黑树,我们需要深入的去理解它的结构,学习一个插入接口,我们已经可以很好的做到这一点了。
检查红黑树是否合法
思路:找到最左向下路径的黑色节点数作为基准值,检查每条路径黑色节点数目是否与基准值相等。
bool prev_check(Node* root, int blackNum,int bench_mark) {if (root == nullptr) {if (blackNum != bench_mark)return false;return true;}if (root->_col == BLACK) {blackNum++;}if (root->_col == RED && root->_parent->_col == RED) {//存在连续的红节点,return falsereturn false;}return prev_check(root->_left, blackNum, bench_mark) &&prev_check(root->_right, blackNum, bench_mark);}bool is_balance() {if (_root == nullptr)return true;if (_root->_col == RED)return false;//黑色节点数量基准值int bench_mark = 0;Node* cur = _root;while (cur) {if (cur->_col == BLACK)++bench_mark;cur = cur->_left;}return prev_check(this->_root, 0, bench_mark);}RBTree.h
#pragma once
//#include<map>
#include<iostream>
#include<assert.h>
using namespace std;enum Colour {RED,BLACK
};
template<class K,class V>
struct __Red_Black_TreeNode {__Red_Black_TreeNode<K, V>* _left;__Red_Black_TreeNode<K, V>* _right;__Red_Black_TreeNode<K, V>* _parent;pair<K, V>_kv;Colour _col;__Red_Black_TreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv) {}
};template<class K, class V>
struct RBTree {typedef __Red_Black_TreeNode<K, V>Node;
private:Node* _root = nullptr;
private://左单旋void rotate_left(Node* parent) {Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL) {subRL->_parent = parent;}Node* ppNode = parent->_parent;//记录一下原先parent的parentsubR->_left = parent;parent->_parent = subR;if (_root == parent) {_root = subR;subR->_parent = nullptr;}else {//如果ppNode==nullpt,是不会进来这里的if (ppNode->_left == parent) {ppNode->_left = subR;}else {ppNode->_right = subR;}subR->_parent = ppNode;}}//右单旋void rotate_right(Node* parent) {Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR) {subLR->_parent = parent;}Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent) {_root = subL;subL->_parent = nullptr;}else {if (ppNode->_left == parent) {ppNode->_left = subL;}else {ppNode->_right = subL;}subL->_parent = ppNode;}}void _inorder(Node* root) {if (root == nullptr)return;_inorder(root->_left);cout << root->_kv.first << endl;_inorder(root->_right);}bool prev_check(Node* root, int blackNum,int bench_mark) {if (root == nullptr) {if (blackNum != bench_mark)return false;return true;}if (root->_col == BLACK) {blackNum++;}if (root->_col == RED && root->_parent->_col == RED) {//存在连续的红节点,return falsereturn false;}return prev_check(root->_left, blackNum, bench_mark) &&prev_check(root->_right, blackNum, bench_mark);}
public:bool is_balance() {if (_root == nullptr)return true;if (_root->_col == RED)return false;//黑色节点数量基准值int bench_mark = 0;Node* cur = _root;while (cur) {if (cur->_col == BLACK)++bench_mark;cur = cur->_left;}return prev_check(this->_root, 0, bench_mark);}
public:void inorder() {this->_inorder(this->_root);cout << "\n";}//前面插入的过程和搜索树一样的bool insert(const pair<K, V>& kv) {if (_root == nullptr) {_root = new Node(kv);_root->_col = BLACK;return true;}Node* parent = nullptr;Node* cur = _root;while (cur) {if (cur->_kv.first < kv.first) {parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first) {parent = cur;cur = cur->_left;}else return false;}cur = new Node(kv);cur->_col = RED;//一开始尽量先变红if (parent->_kv.first < kv.first) {parent->_right = cur;}else {parent->_left = cur;}cur->_parent = parent;while (parent && parent->_col == RED) {Node* grandparent = parent->_parent;assert(grandparent && grandparent->_col == BLACK);//关键看叔叔//判断一下左右if (parent == grandparent->_left) {Node* uncle = grandparent -> _right;//情况1(不看方向)if (uncle && uncle->_col == RED) {parent->_col = uncle->_col = BLACK;grandparent->_col = RED;//继续向上处理cur = grandparent;parent = cur->_parent;}//情况2+3//uncle不存在/存在且为黑else {//情况2// g// p u// c//右单旋+变色if (cur == parent->_left) {rotate_right(grandparent);parent->_col = BLACK;//父亲变黑grandparent->_col = RED;//祖父变红}//情况3// g// p u// c//左右双旋+变色else {rotate_left(parent);rotate_right(grandparent);//看着图写就行了cur->_col = BLACK;grandparent->_col = RED;}break;}}else {Node* uncle = grandparent->_left;//情况1(不看方向)if (uncle && uncle->_col == RED) {parent->_col = uncle->_col = BLACK;grandparent->_col = RED;//继续向上处理cur = grandparent;parent = cur->_parent;}else {//情况2// g// u p// c //左单旋+变色if (cur == parent->_right) {rotate_left(grandparent);parent->_col = BLACK;//父亲变黑grandparent->_col = RED;//祖父变红}//情况3// g// u p// c//右左双旋+变色else {rotate_right(parent);rotate_left(grandparent);//看着图写就行了cur->_col = BLACK;grandparent->_col = RED;}break;}}}_root->_col = BLACK;//最后无论根是红是黑 -- 都处理成黑return true;}
};void test1() {int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };RBTree<int, int>t1;for (auto e : a) {t1.insert(make_pair(e, e));}t1.inorder();cout << "is_balance():" << t1.is_balance() << endl;
}
void test2() {size_t N = 10000;srand((unsigned)time(nullptr));RBTree<int, int>t1;for (size_t i = 0; i < N; ++i) {int x = rand();t1.insert(make_pair(x, i));}cout << "is_balance():" << t1.is_balance() << endl;
}总结
看到这里,大家应该对红黑树的实现,重点是它的旋转有了比较深入的了解了。这篇博客博主花了很多心思在画图上,也投入了很多时间到画图上。下期给大家带来map/set的封装。希望大家可以多多支持,一键三连,点赞关注收藏评论后在离开哦!
( 转载时请注明作者和出处。未经许可,请勿用于商业用途 )
更多文章请访问我的主页
@背包![]() https://blog.csdn.net/Yu_Cblog?type=blog
https://blog.csdn.net/Yu_Cblog?type=blog