【图像处理】像素坐标系、像平面坐标系、相机坐标系、世界坐标系、内参矩阵、外参矩阵
- 像素坐标系
- 像平面坐标系
- 相机坐标系
- 世界坐标系
- 像素坐标系<=>像平面坐标系
- 像素坐标系<=>相机坐标系
- 相机坐标系<=>世界坐标系
- 结语
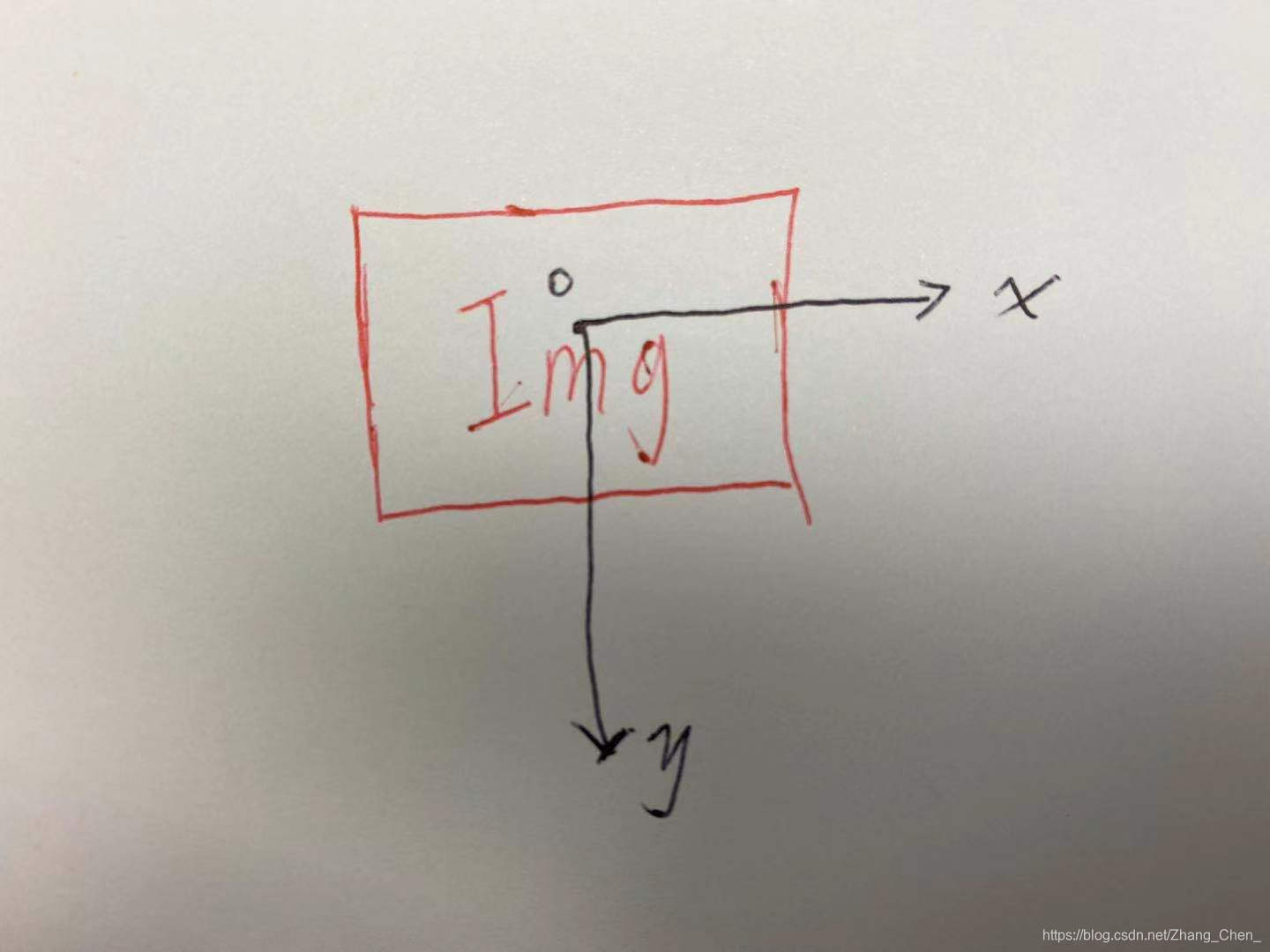
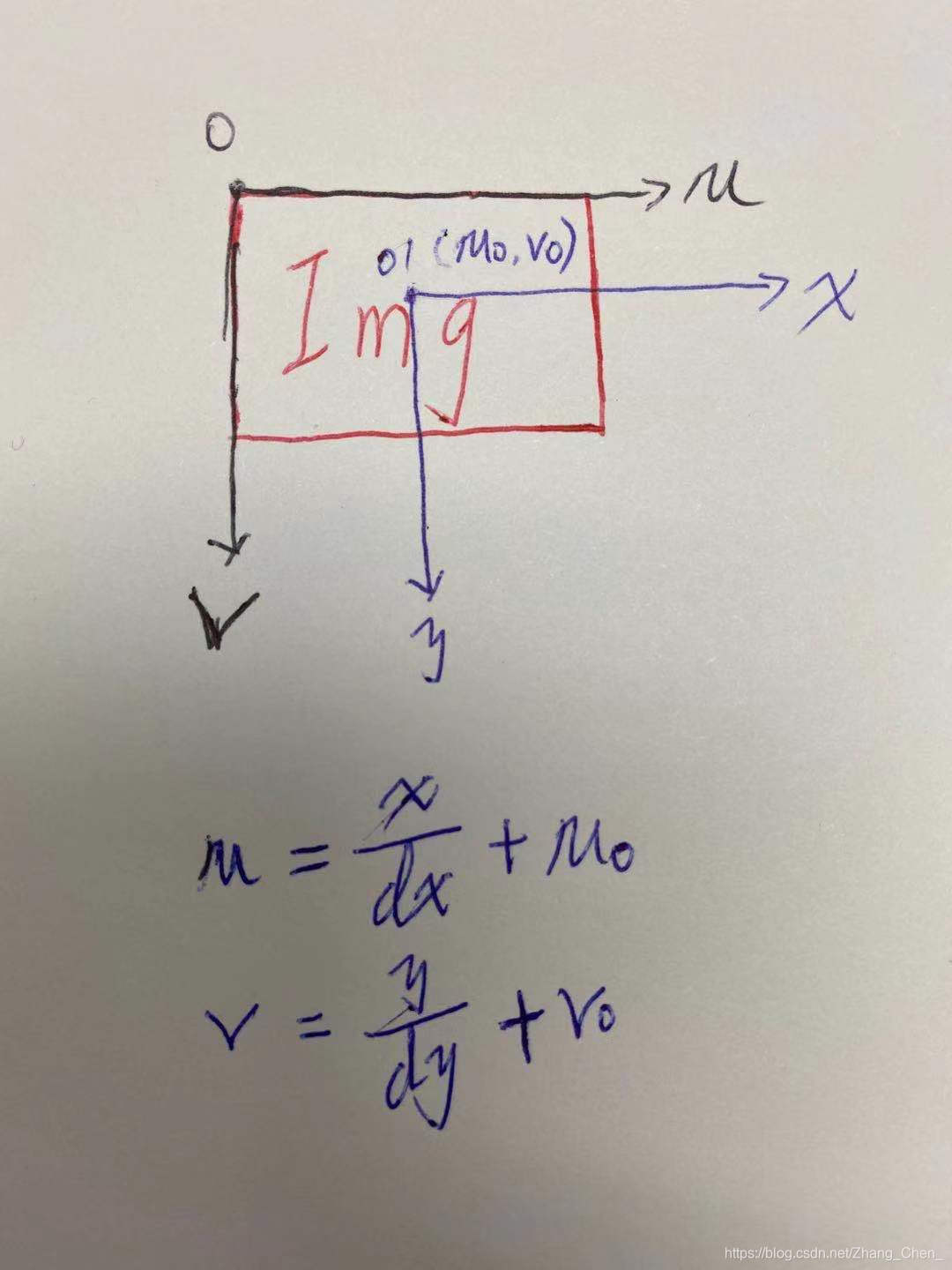
像素坐标系
以图像左上角为原点建立以像素为单位的直接坐标系 u − v u-v u−v。横轴为 u u u,向右为正方向;纵轴为 v v v,向下为正方向
u u u和 v v v代表像素的行数和列数,没有物理单位

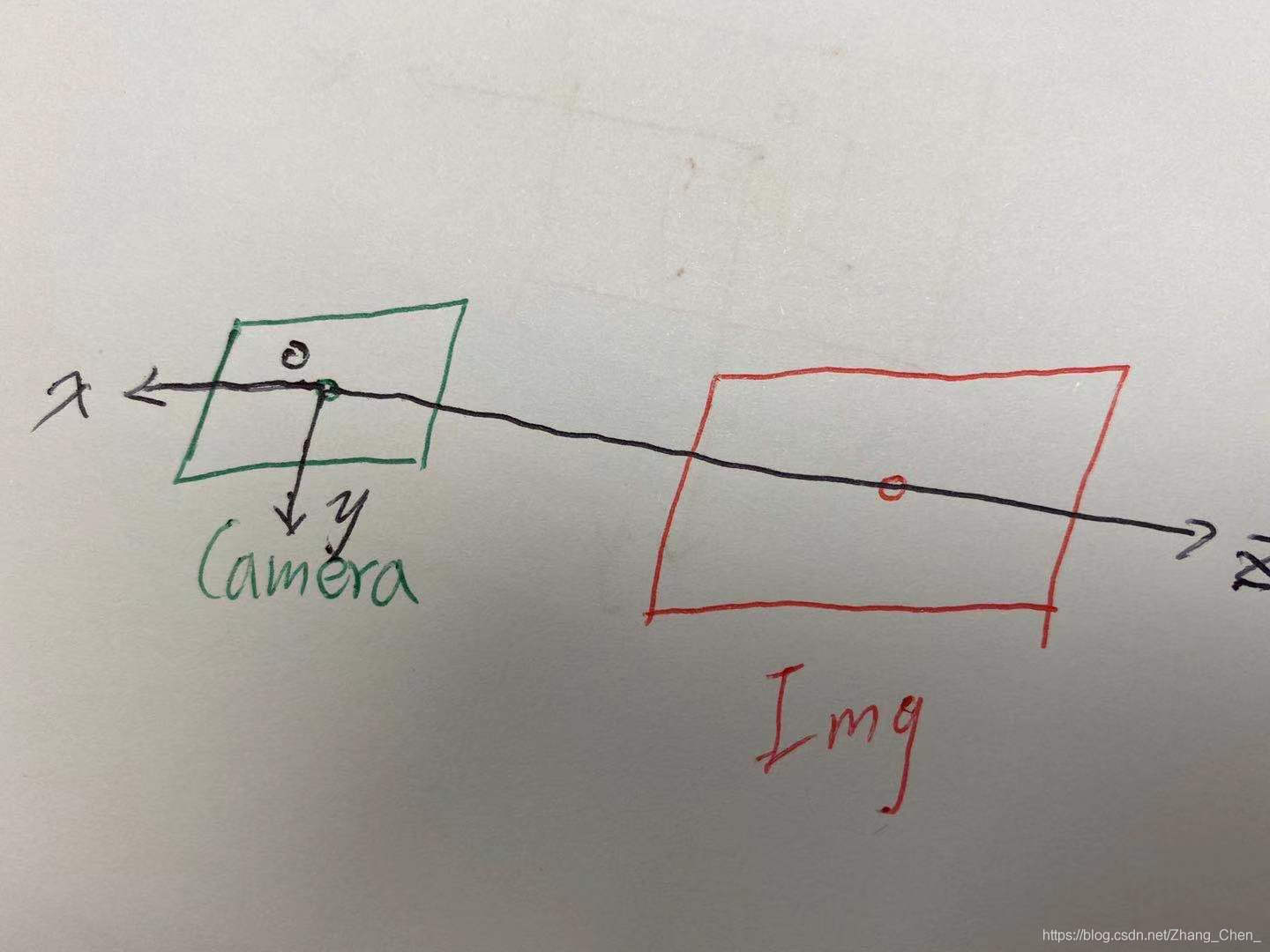
像平面坐标系
像平面坐标系 o − x y o-xy o−xy是以影像几何中心 o o o为原点, x x x、 y y y轴方向分别为平行于影像画幅边缘线的二维坐标系。
相机坐标系
相机坐标系 o c − x c y c z c o_c-x_cy_cz_c oc−xcyczc是以摄像机光心为原点,z轴与光轴重合也就是z轴指向相机的前方(也就是与成像平面垂直),x轴与y轴的正方向与像平面坐标系平行的三维直角坐标系。
世界坐标系
由于摄像机可安放在环境中的任意位置,在环境中选择一个基准坐标系来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系 o w − x w y w z w o_w-x_wy_wz_w ow−xwywzw。
相机坐标系与世界坐标系之间的坐标变换属于刚体变换,即其变换的关系可以用旋转矩阵与平移向量来描述。
像素坐标系<=>像平面坐标系
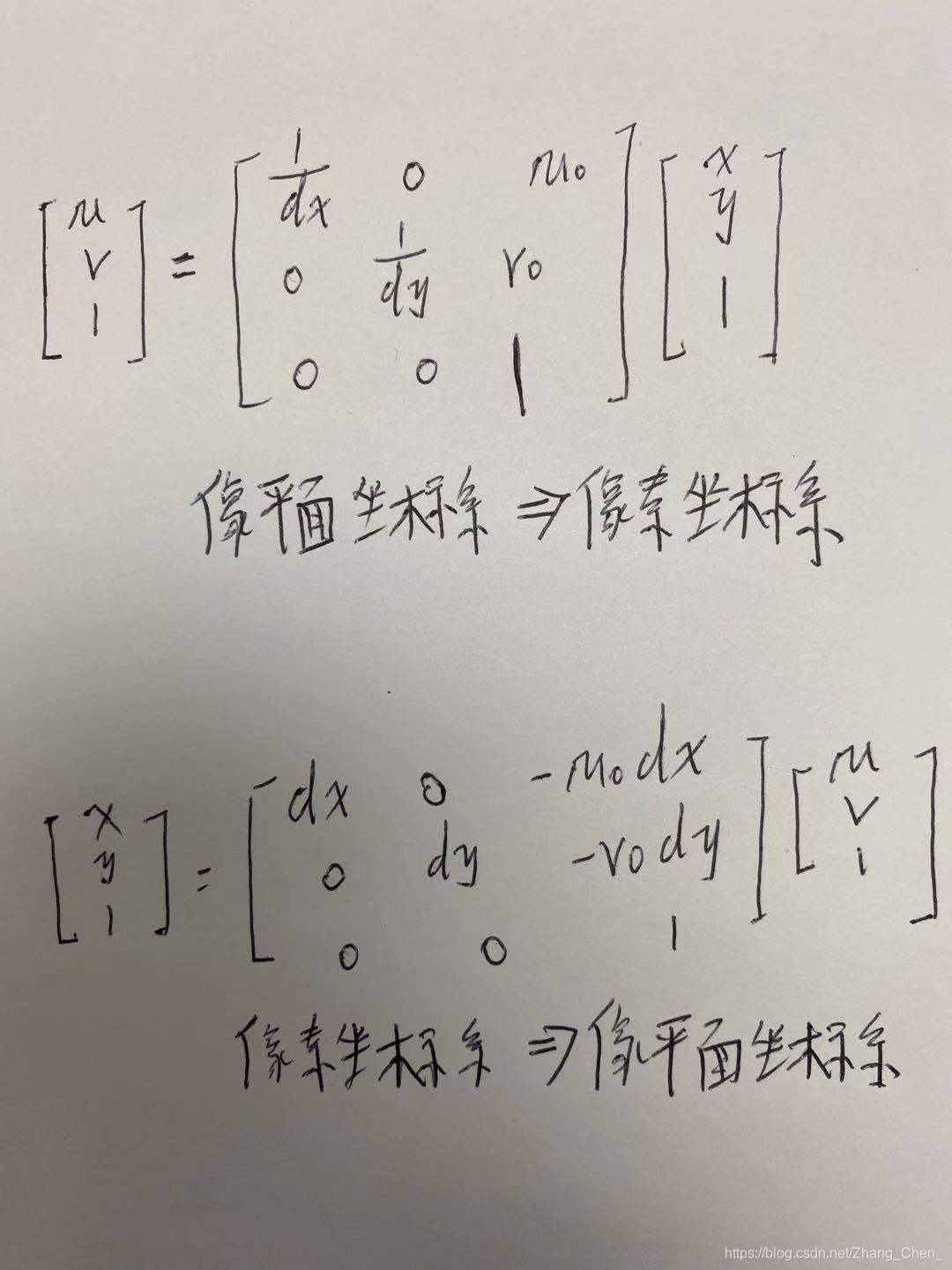
假设 ( u 0 , v 0 ) (u_0,v_0) (u0,v0)代表 O 1 O_1 O1在 u − v u-v u−v坐标系下的坐标, d x d_x dx与 d y d_y dy分别表示每个像素在像平面坐标系横轴 x x x和纵轴 y y y上的物理尺寸。
则像素坐标系和像平面坐标系有如下关系:
写成矩阵形式,就是:
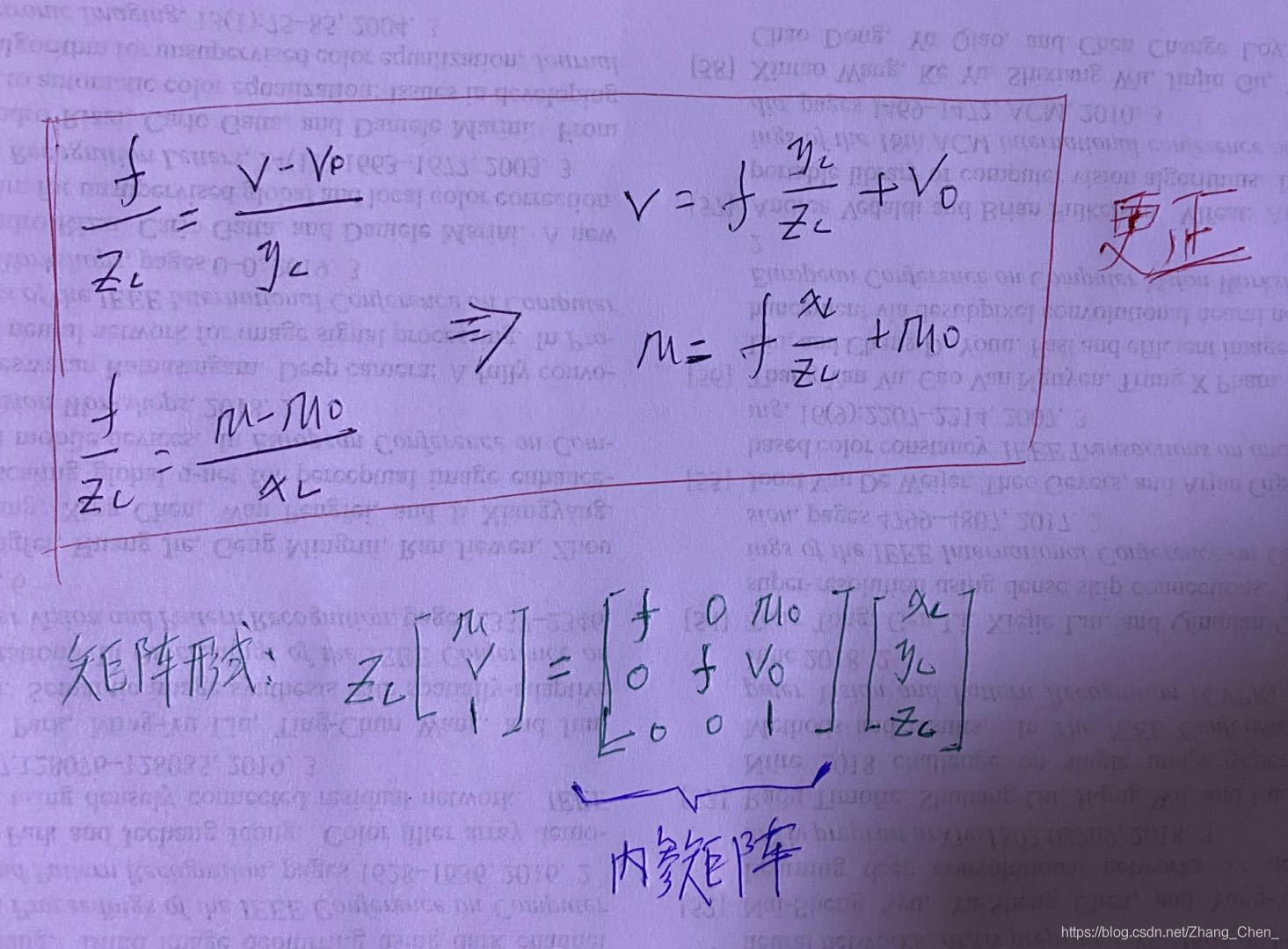
像素坐标系<=>相机坐标系
符合透视投影关系
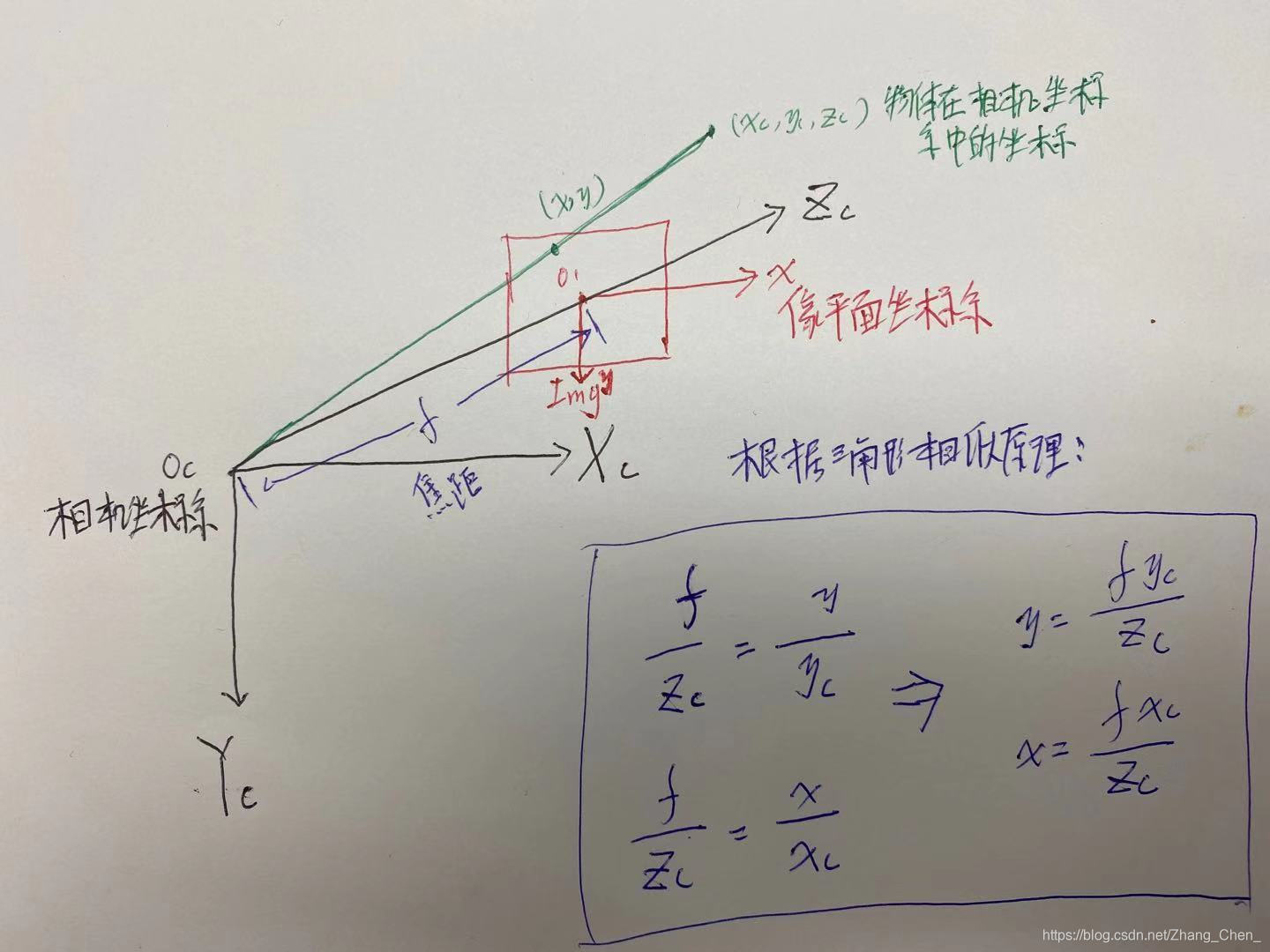 更正:上图中红色的不是像平面坐标系,而是原点从左上角平移到中心的像素坐标系!
更正:上图中红色的不是像平面坐标系,而是原点从左上角平移到中心的像素坐标系!
写成矩阵形式,就是:
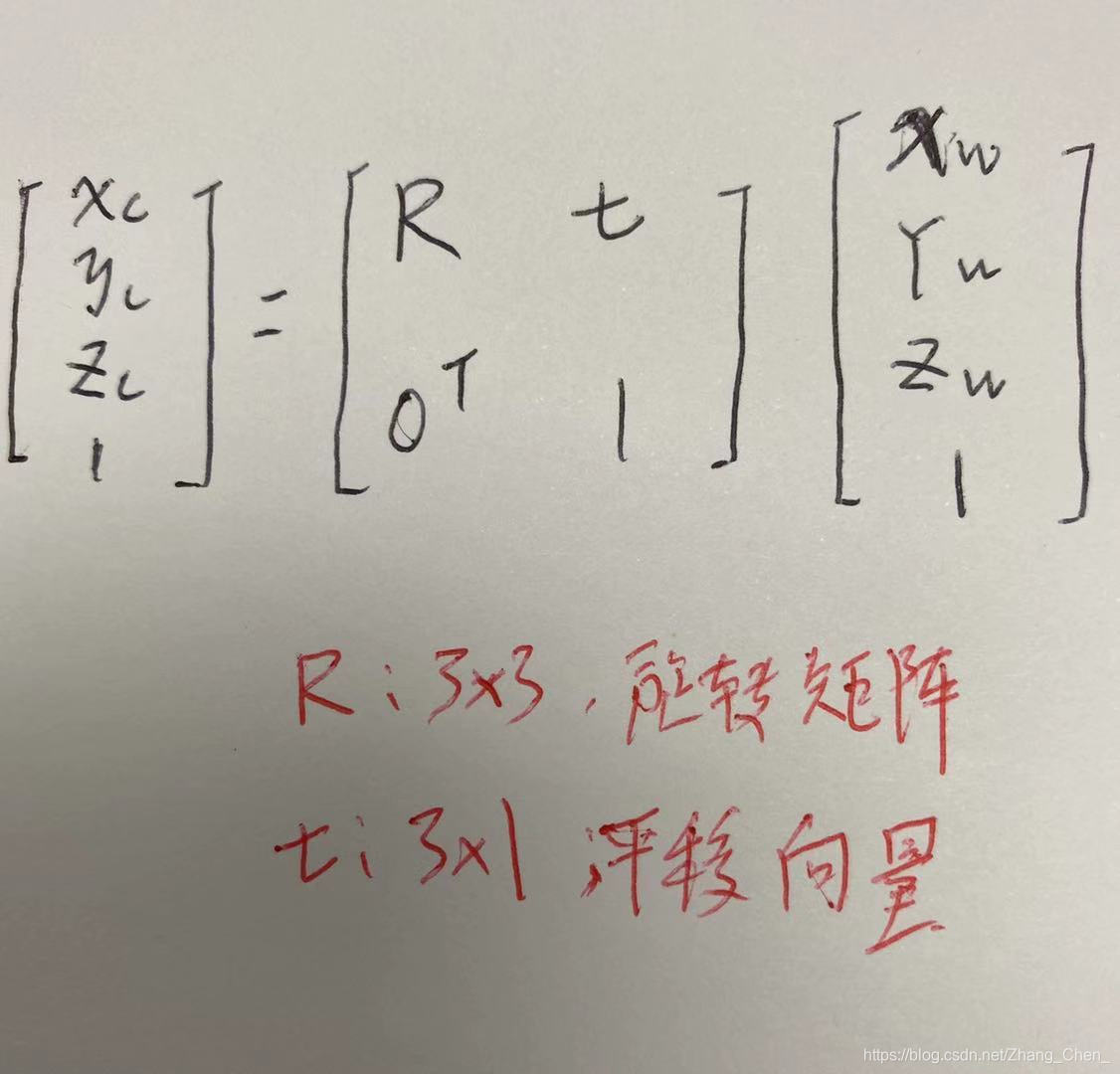
相机坐标系<=>世界坐标系
世界坐标系是为了描述相机的位置而被引入的。
平移向量 t t t和旋转矩阵 R R R可以用来表示相机坐标系与世界坐标系的关系。
所以,假设空间点 P P P在世界坐标系下的齐次坐标是 ( x w , y w , z w , 1 ) T (x_w, y_w, z_w, 1)^T (xw,yw,zw,1)T,在相机坐标系下的齐次坐标是 ( x c , y c , z c , 1 ) T (x_c, y_c, z_c, 1)^T (xc,yc,zc,1)T,则存在如下关系:
结语
如果您有修改意见或问题,欢迎留言或者通过邮箱和我联系。
如果我的文章对您有帮助,转载请注明出处。