文章目录
- 1. 人体姿态估计的介绍和应用
- 2-1. 2D姿态估计概述
- 2.1 任务描述
- 2.2 基于回归
- 2.3 基于热力图
- 2.3.1 从数据标注生成热力图(高斯函数)
- 2.3.2 使用热力图训练模型
- 2.3.3 从热力图还原关键点
- 2.4 自顶向下
- 2.5 自底向上
- 2.6 单阶段方法
- 2-2. 2D姿态估计详细说明
- 2.1 基于回归的自顶向下方法
- 2.1.1 经典方法
- 2.1.2 基于最大似然估计的改进
- 3. 3D姿态估计
- 4. 人体姿态估计的评估方法
- 5. DensePose
- 6. 人体参数化模型
视频链接:B站-人体关键点检测与MMPose
1. 人体姿态估计的介绍和应用
关键点提取,属于模式识别

人体姿态估计的下游任务:行为识别(比如:拥抱。。)

下游任务:CG和动画,这个是最常见的应用

下游任务:人机交互(手势识别,依据收拾做出不同的响应,比如:HoloLens会对五指手势(3D)做出不同的反应)
2-1. 2D姿态估计概述
包括:
- 自顶向下方法
- 自底向上方法
- 单阶段方法
- 基于Transformer的方法
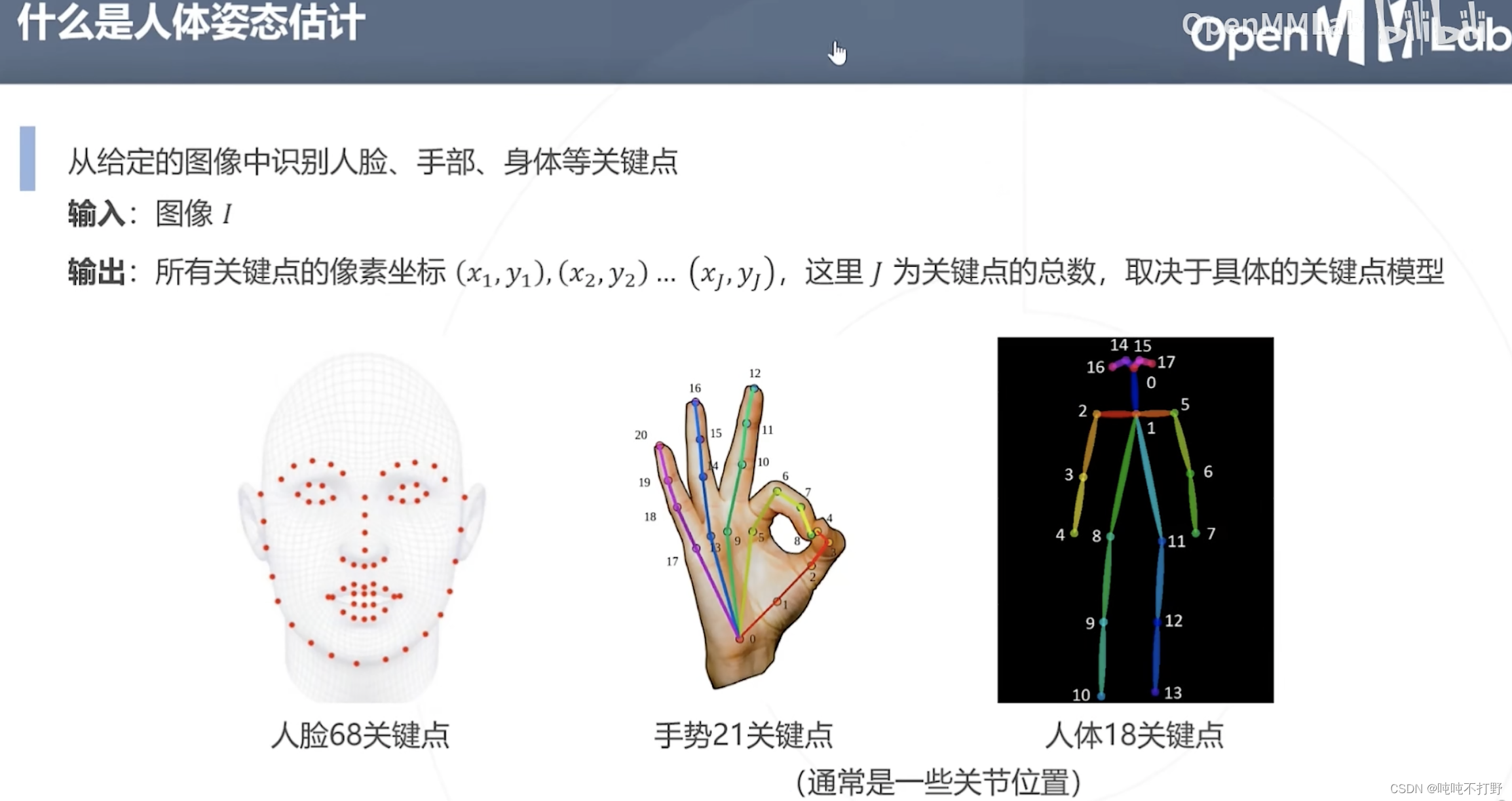
2.1 任务描述
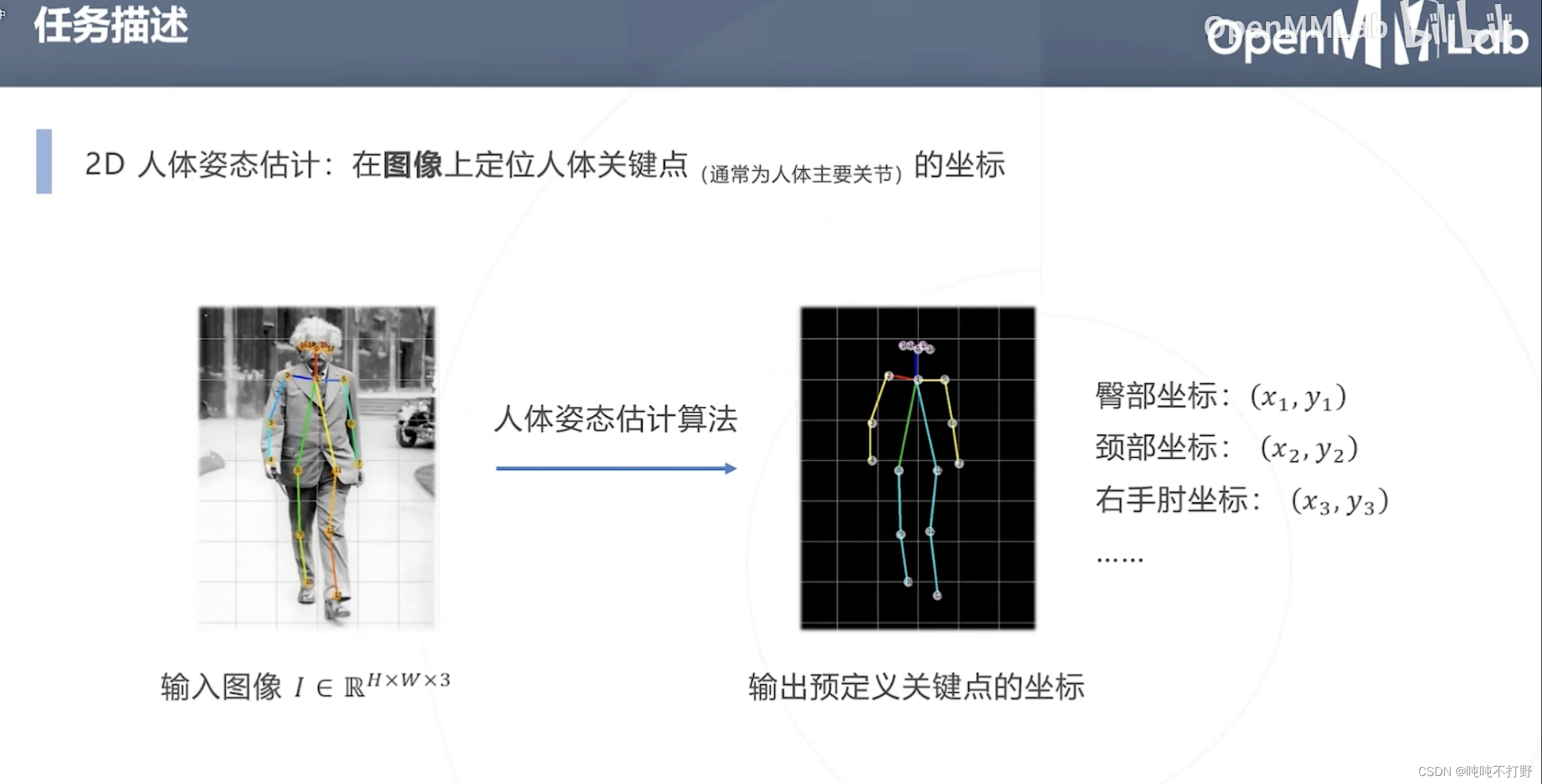
2D人体姿态估计的任务:
- 输入:一张包含人体的图像
- 输出:人体关键点(主要关节)的坐标(2D的)
注意,这里的输出是固定对应(预定义的)18个关节的坐标,就是要找这18个位置的坐标
2.2 基于回归
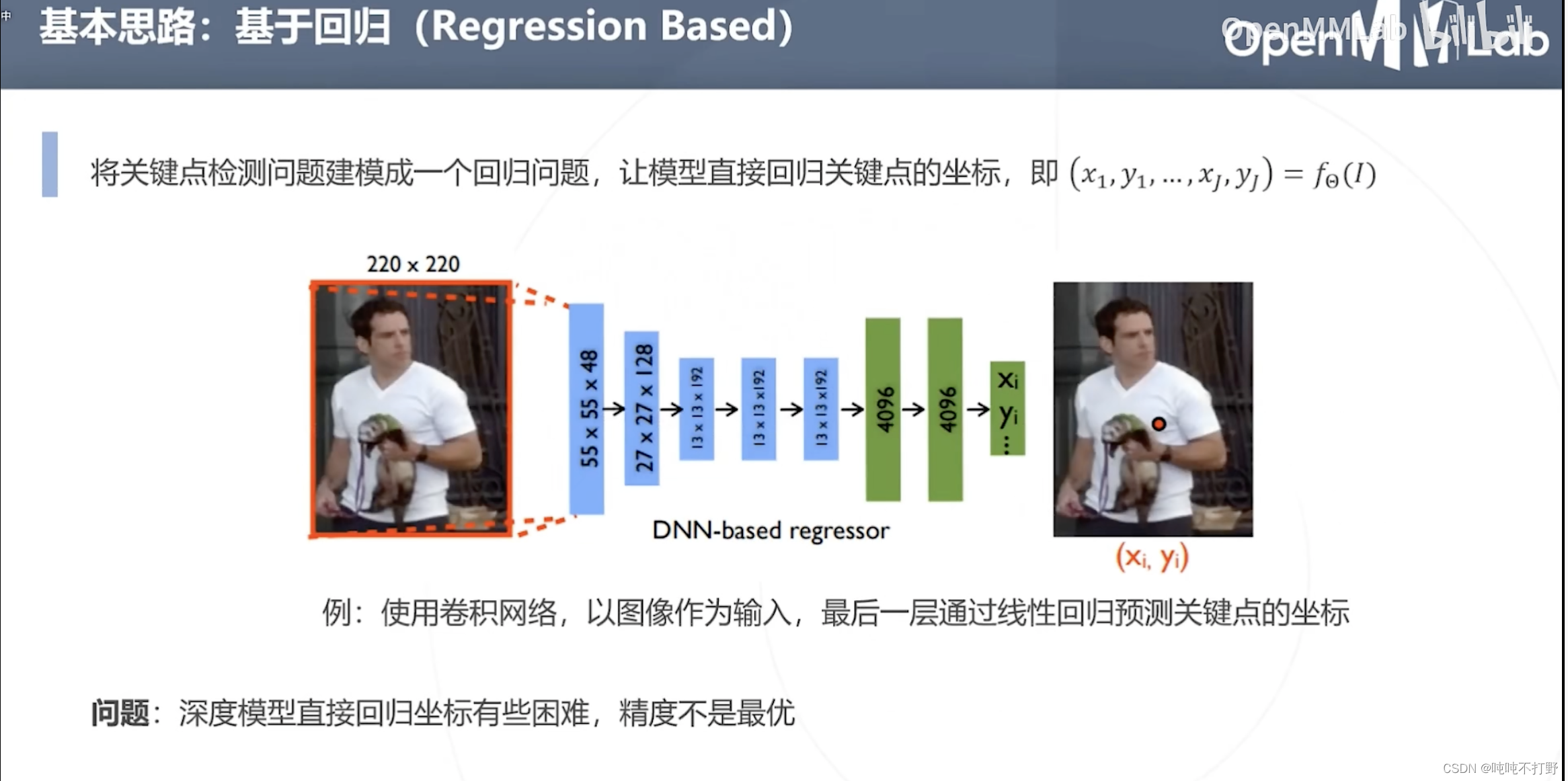
使用深度学习的模型直接回归坐标有些困难,精度不是最优(效果不好)
2.3 基于热力图
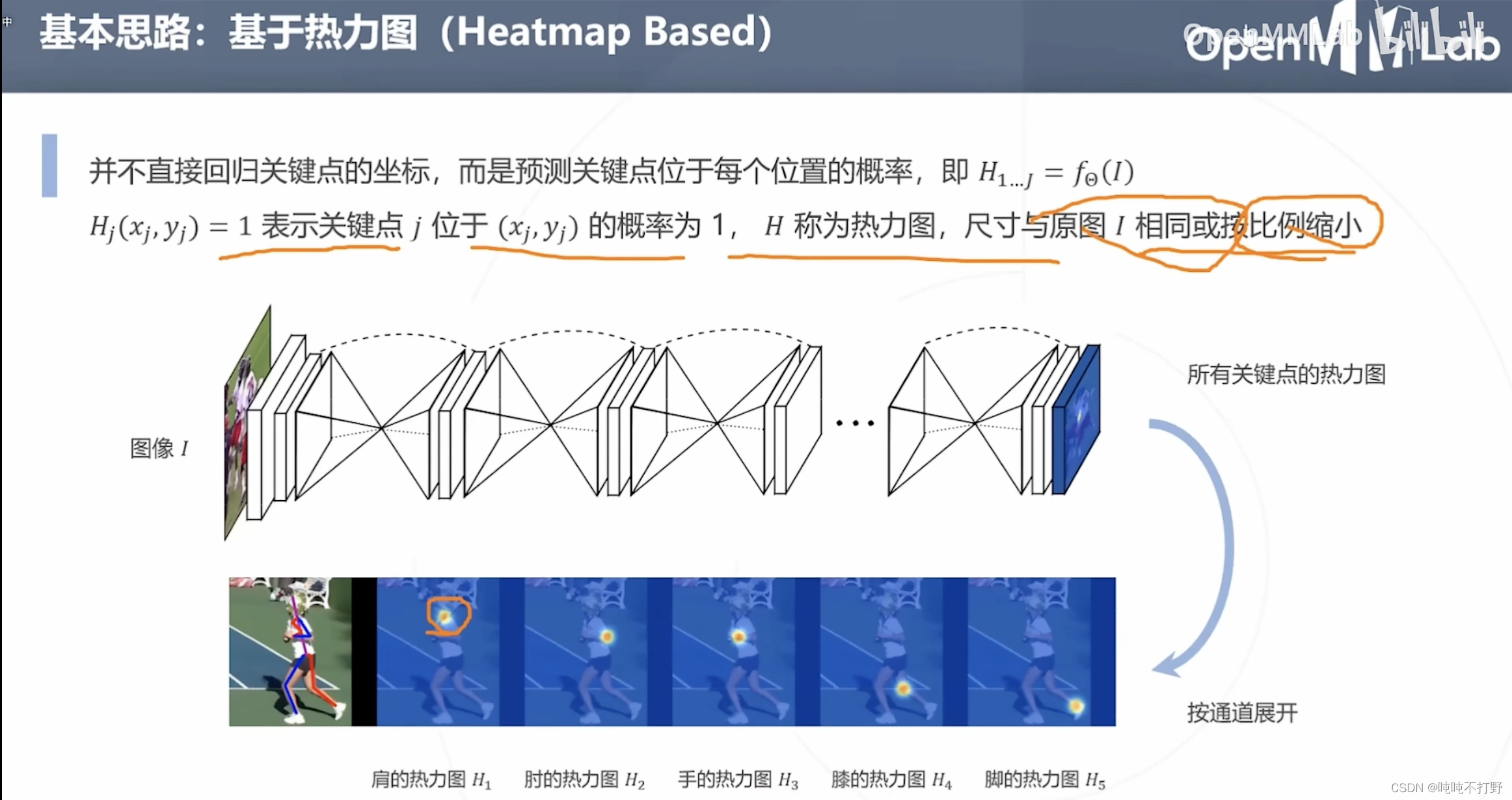
另一种思路是:不直接回归关键点的坐标,而是预测关键点位于每个位置的概率。
- 比如肩的热力图(越靠近肩膀的预定义的关键点,概率越高,颜色逐渐从黄色变成红色)
- 18个关键点,对应18个热力图
基于热力图天然符合神经网络的卷积算子(对每个像素都进行计算,得到每个像素的概率)
2.3.1 从数据标注生成热力图(高斯函数)
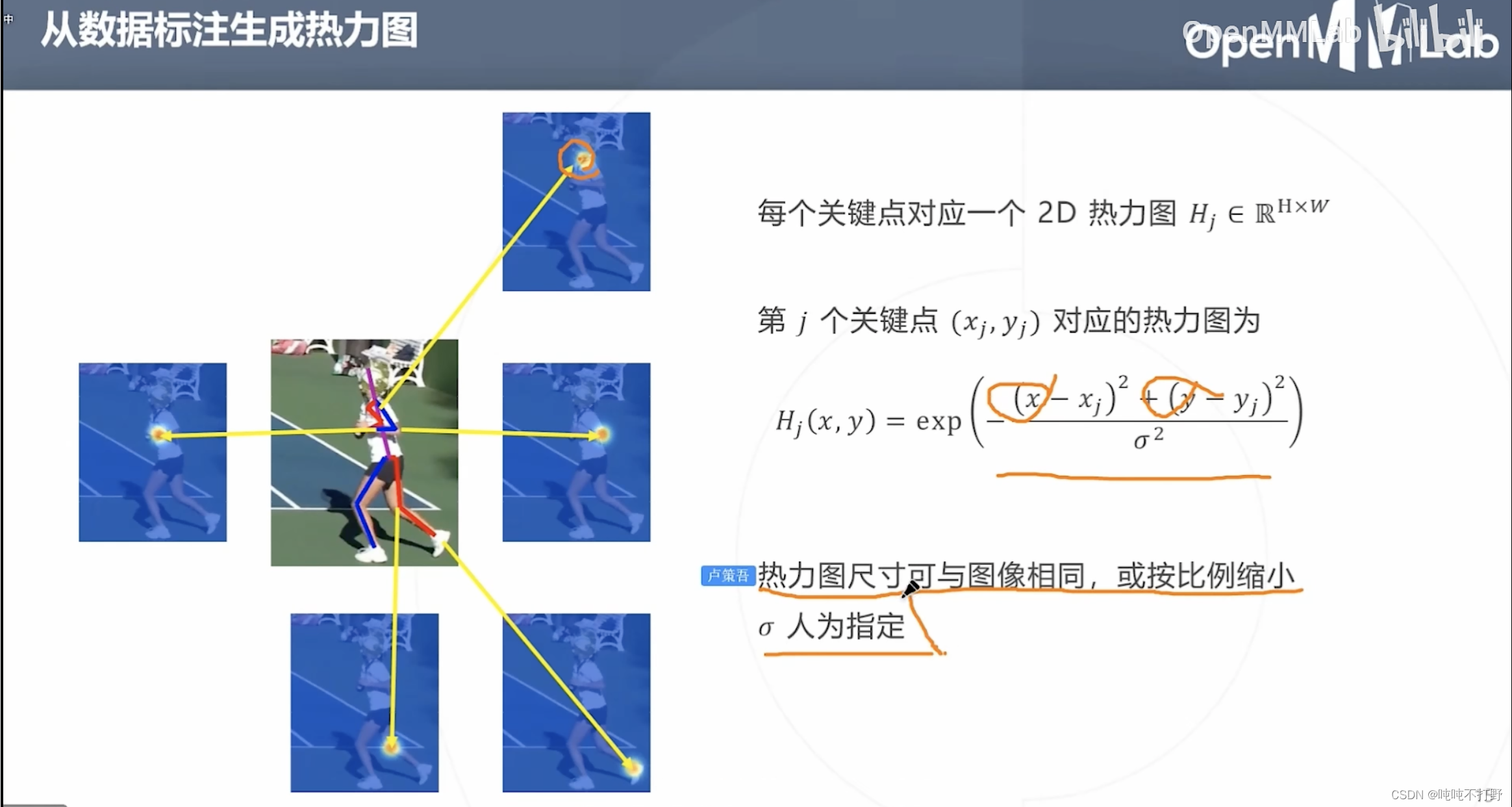
如果想要使用基于热力图的方式,那么首先要根据已有的标注数据生成热力图。
- 预定义的关键点附近区域的概率其实符合这一事实:
- 越靠近预定义的关键点,概率越高,如上图,颜色逐渐从黄色变成红色
- 假设上面这个热力图区域是个圆形,那么任意一个直径作为 x x x轴(距离预定义关键点的距离作为自变量),是关键点的概率作为 y y y轴(因变量),则可以用高斯函数来描述 x x x和 y y y的关系
- 所以这里是假设关键点区域的热力图符合高斯分布,来生成热力图(概率图),来进行训练。
- 所以这里说热力图的尺寸,即作为控制高斯函数图像钟的宽度的 σ \sigma σ参数,也就是控制热力图区域大小
复习一下高斯函数(红色线代表标准正态分布):
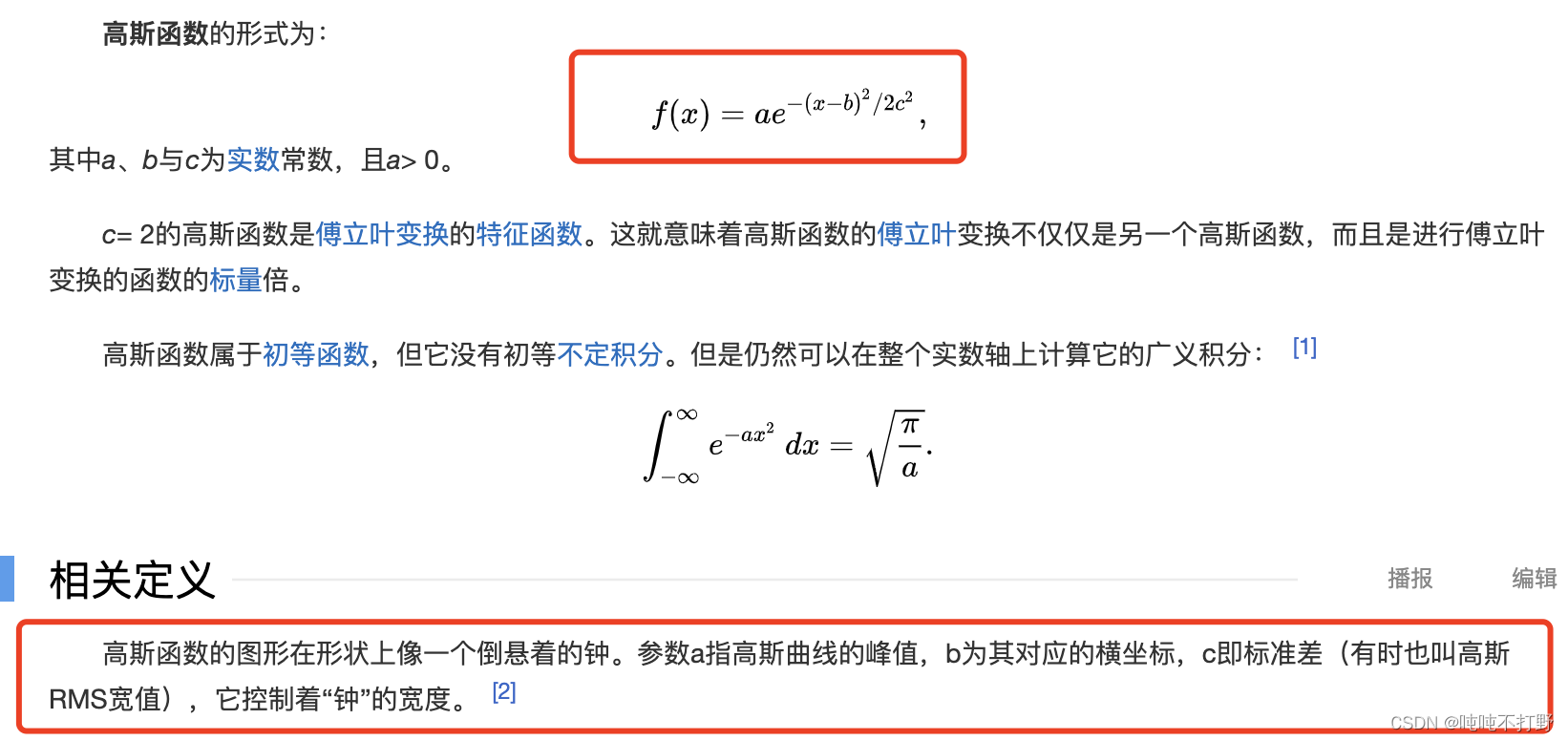
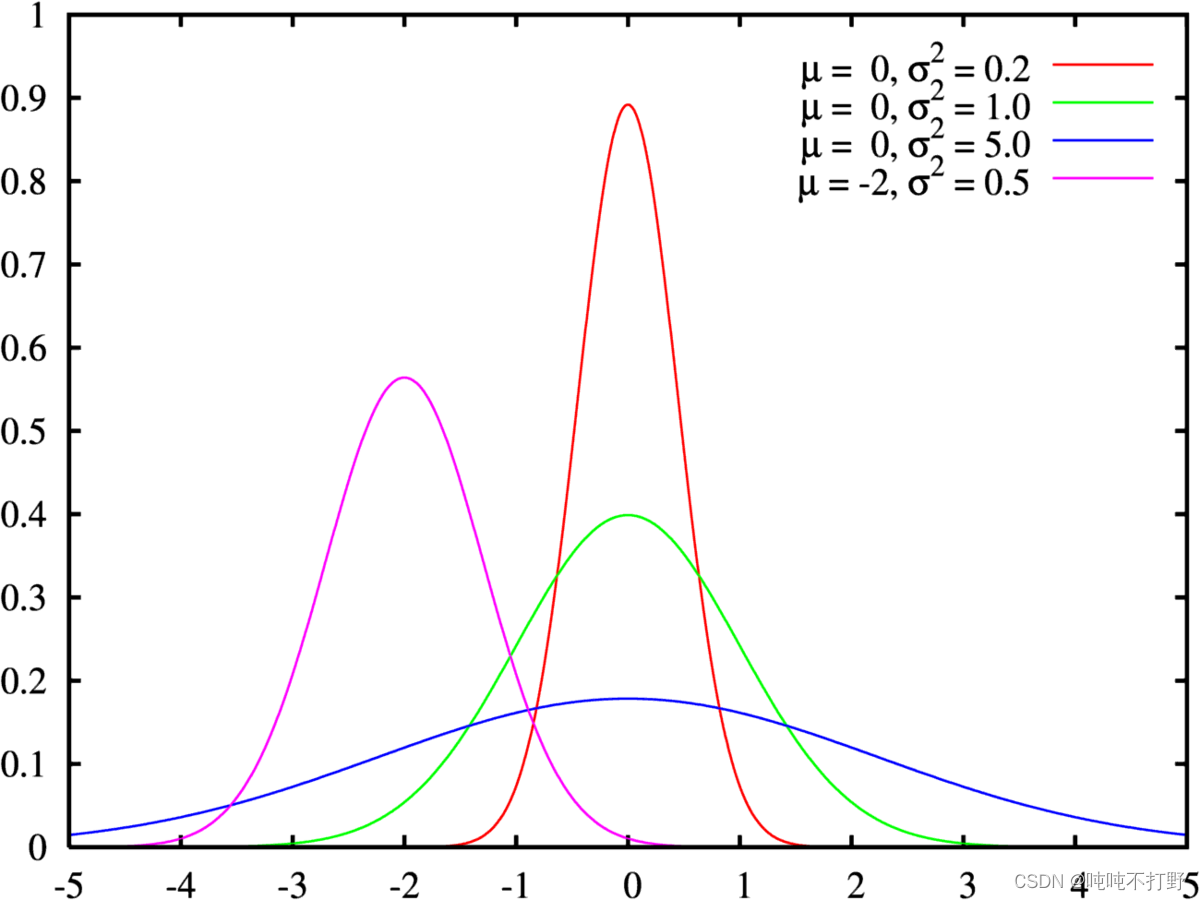
上图是用期望值及方差作为参数表示的高斯曲线
高斯函数是正态分布的密度函数,下图的红色是标准正态分布
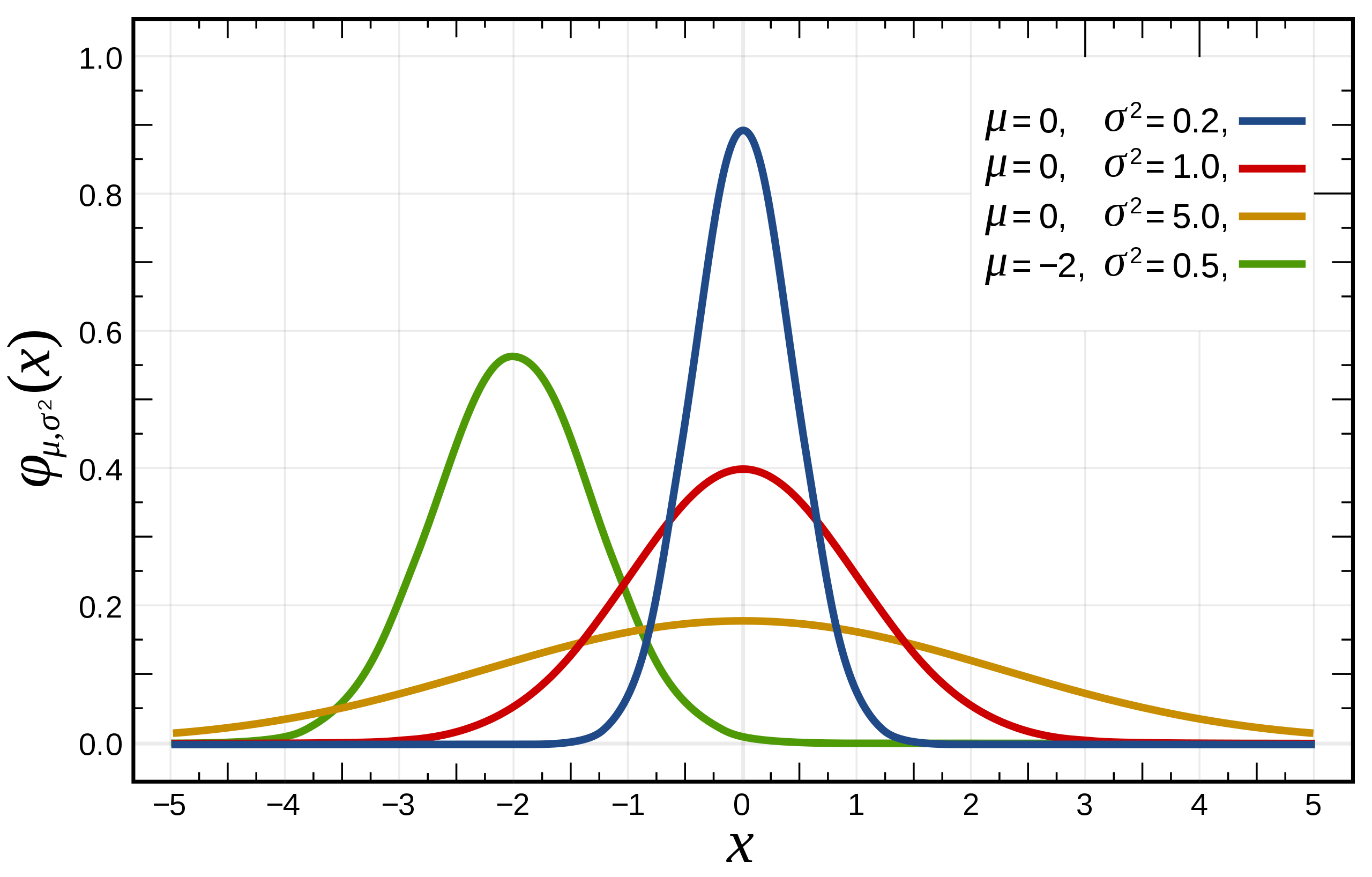
正态分布的数学期望值或期望值 μ μ μ等于位置参数,决定了分布的位置;其方差 σ 2 \sigma^2 σ2的开平方或标准差 σ \sigma σ 等于尺度参数,决定了分布的幅度。
可以直接看:
- 中文wiki百科-高斯函数
- 中文wiki百科-正态分布
- 打不开上面这个看下面转载的这个,旧了点,但是意思差不多:高斯分布(Gaussian distribution)/正态分布(Normal distribution)
2.3.2 使用热力图训练模型
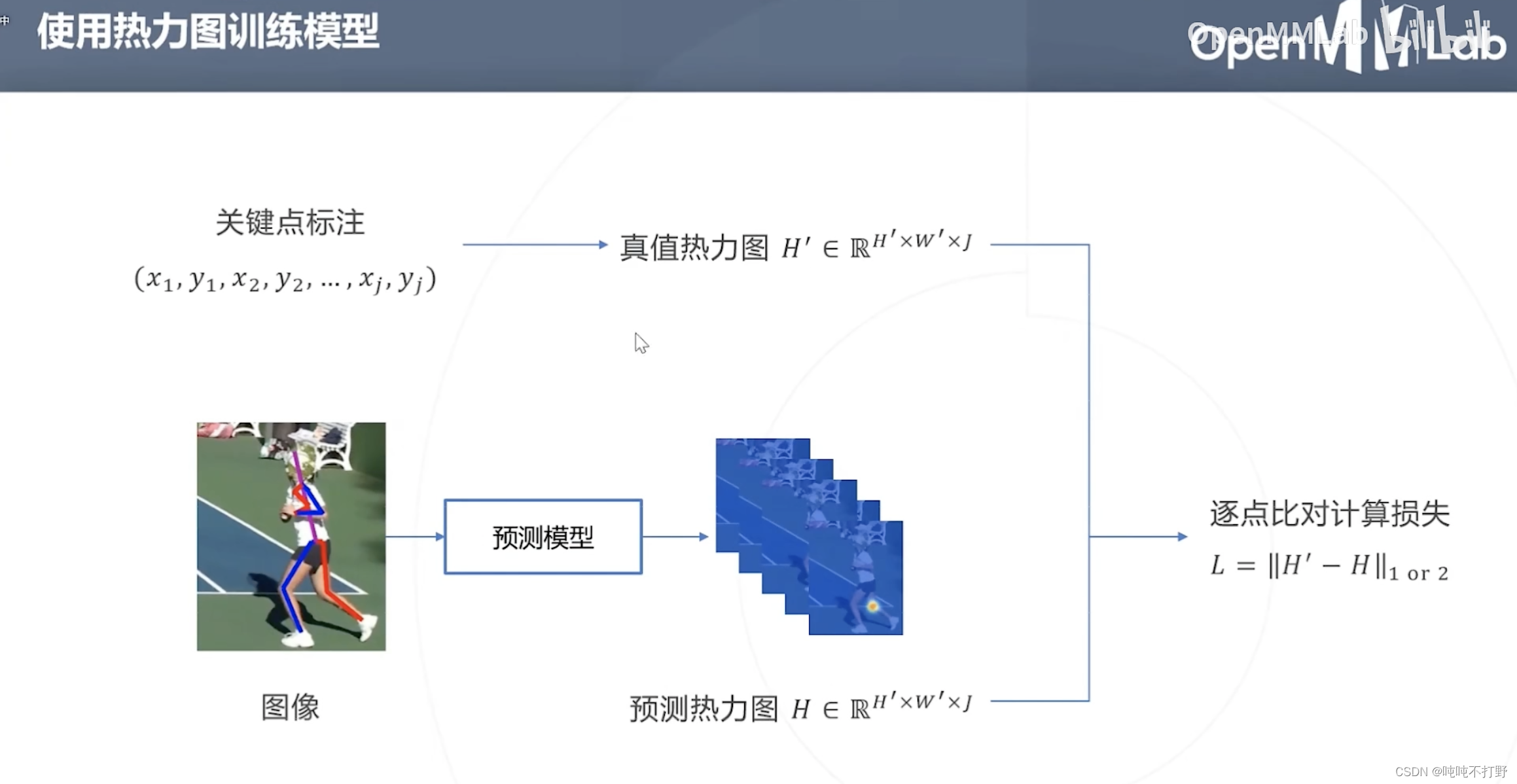
将通过关键点标注生成的真值热力图,作为True label,与预测模型预测出来的热力图Predict label逐点比对(就是关键点附近那一小片区域的热力图),计算损失
所以基于热力图的方法关键就是中心点位置 ( x j , y j ) (x_j,y_j) (xj,yj)(训练目标,优化的参数)和区域大小 α \alpha α(可以是超参,也可以基于图像缩放得到,缩放系数也是超参)
- 这里其实是一个2D的高斯函数, ( x j , y j ) (x_j,y_j) (xj,yj)其实就对应上面高斯函数图像的最高点
- 即,真值热力图的构建函数需要满足:距离关键点越近,概率越大,所以高斯函数天然满足这个性质
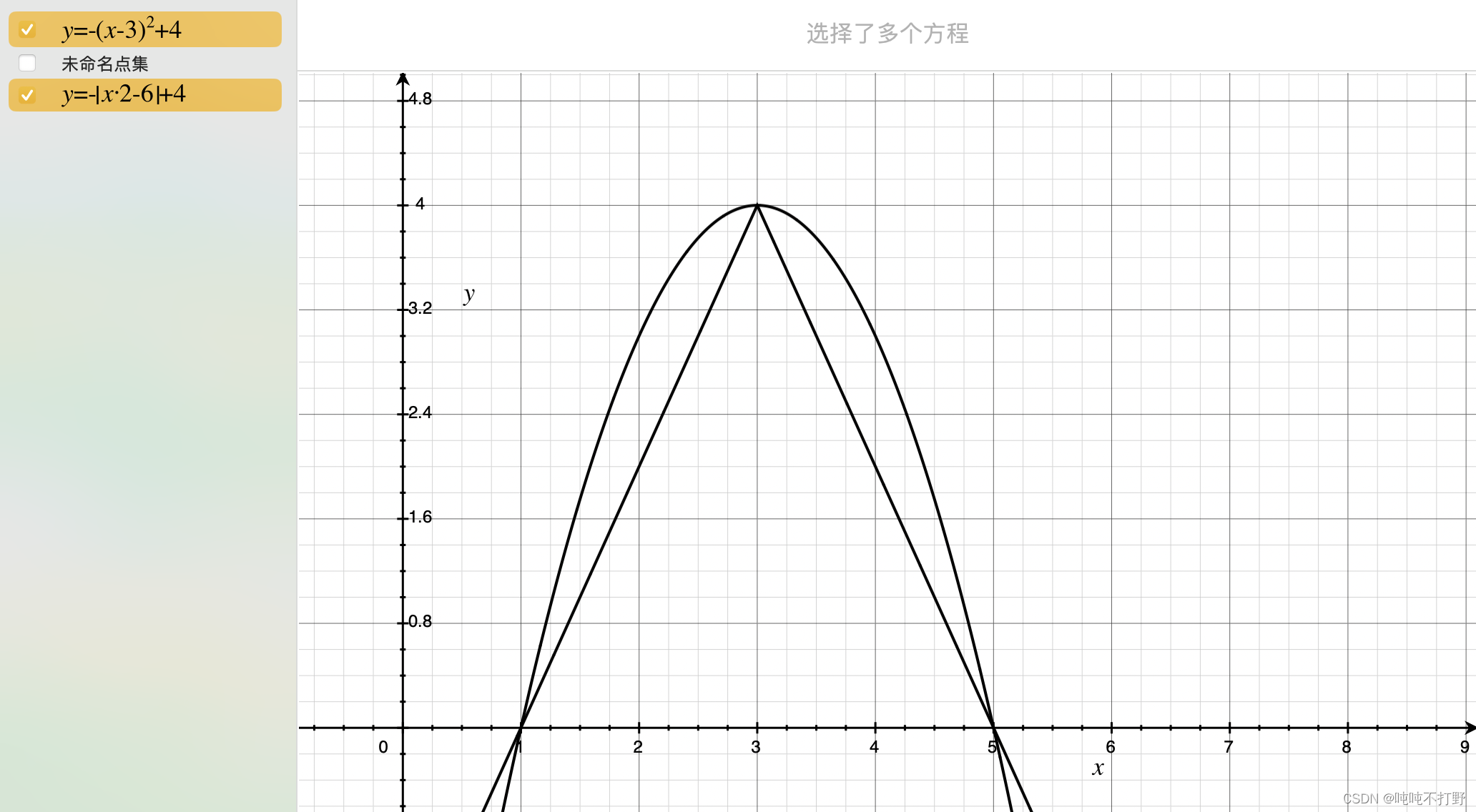
- 除此之外,其实只要是类似钟形都可以,下面这个抛物线函数,还有我随便造的一个绝对值函数,其实都满足这个条件(但是概率取值范围[0,1]需要进一步处理一下才行)
2.3.3 从热力图还原关键点
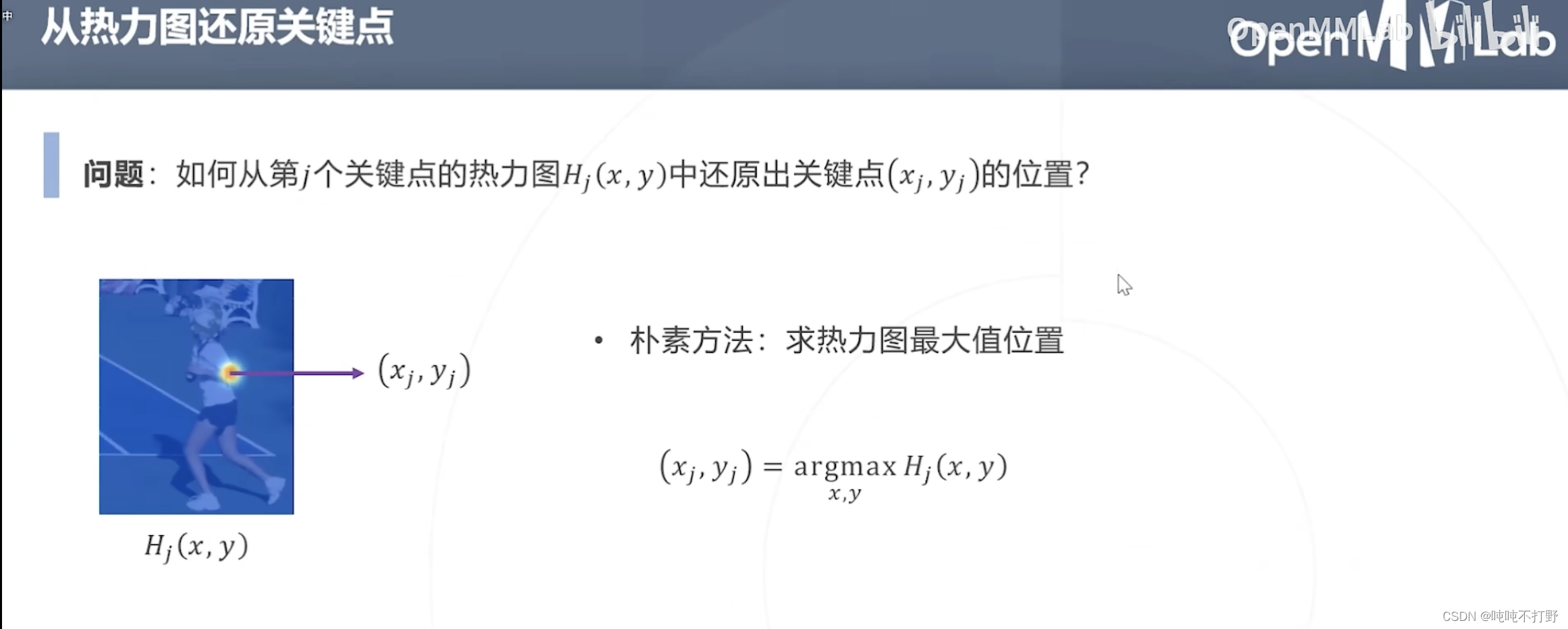
- 最直接的办法就是求最大概率(热力图最大值)对应的位置的坐标,
- 按照生成真值热力图的方式来倒退,是很合理的方式
- 但这是基于:预测的热力图符合高斯函数,这一假设下的推论
- 实际上,可能预测的热力图形状不会那么规整,可能会有多个最大值,所以直接求1个最大值这种方式不够鲁棒
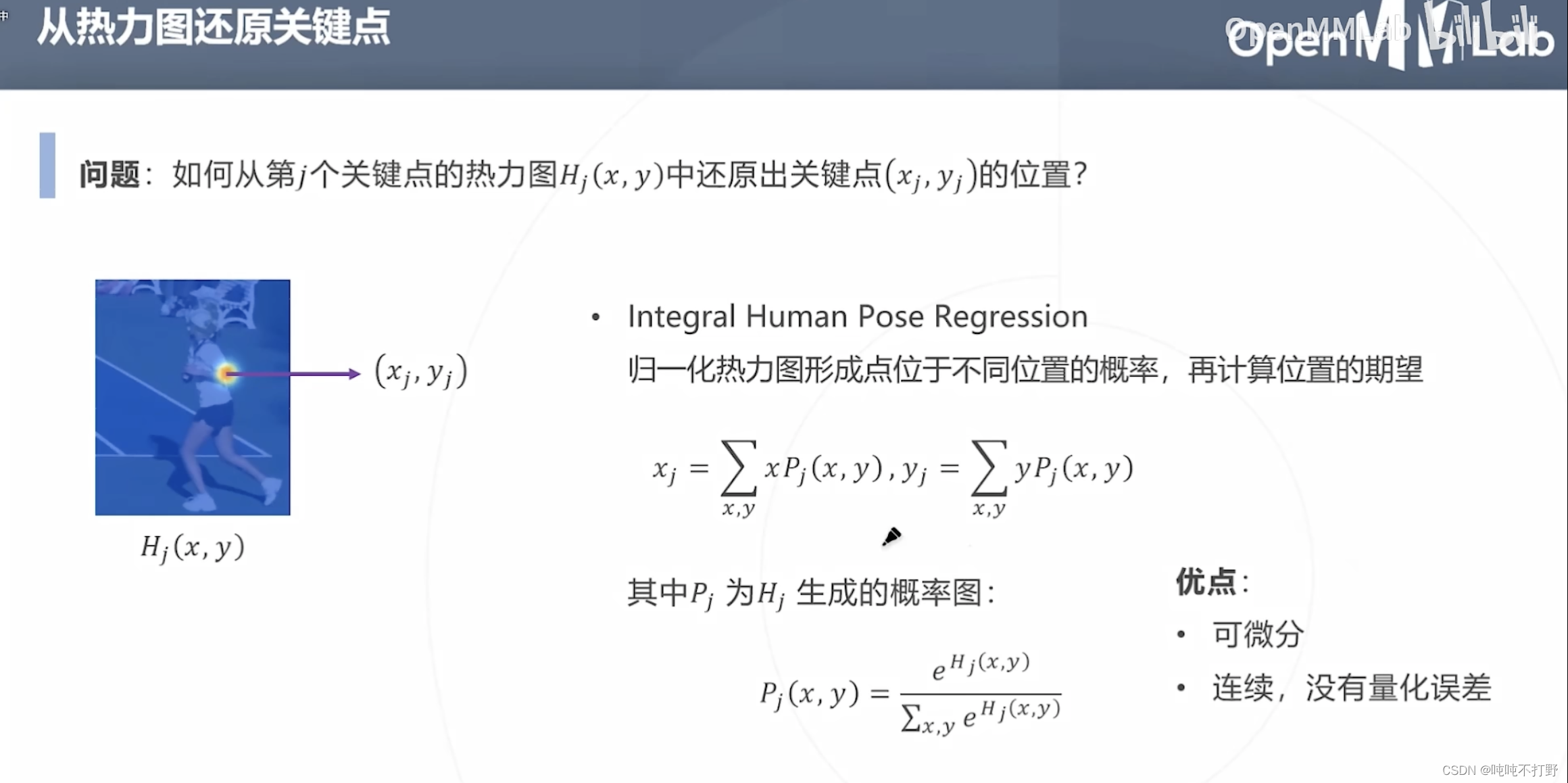
另一种从热力图还原关键点的方式就是:
- 先对热力图的概率进行归一化(对概率用softmax,输出的还是概率),用归一化后的概率计算位置的期望
- 期望就是平均值,在1D的高斯函数图像中,高斯函数的最高点,对应的 x x x值,确实是 x x x取值范围的均值。
- 可能不一定能取到最高点,但是能取到"重心",这样利用了整个热力图的概率,就会比较鲁棒,相对于上面只看热力图的最大概率
这种计算方式还有很好的一个性质:
- 可以进行端到端的训练,还原关键点的方式的公式,是可以求导的,所以能和整个训练过程串起来。
- 比如,一开始训练的时候,网络初始化使用的是关键点随机数来生成初始预测热力图,第一轮训练完成后,得到生成的热力图,就可以得到一个矫正过的关键点,以此来作为第二轮使用的热力图的初始值,继续迭代。
- 但是上面优化的时候只使用热力图的loss, 但是真实关键点和预测关键点也都可以拿到,关键点的loss其实也可以加上去。两种损失一起会更好吗??
2.4 自顶向下
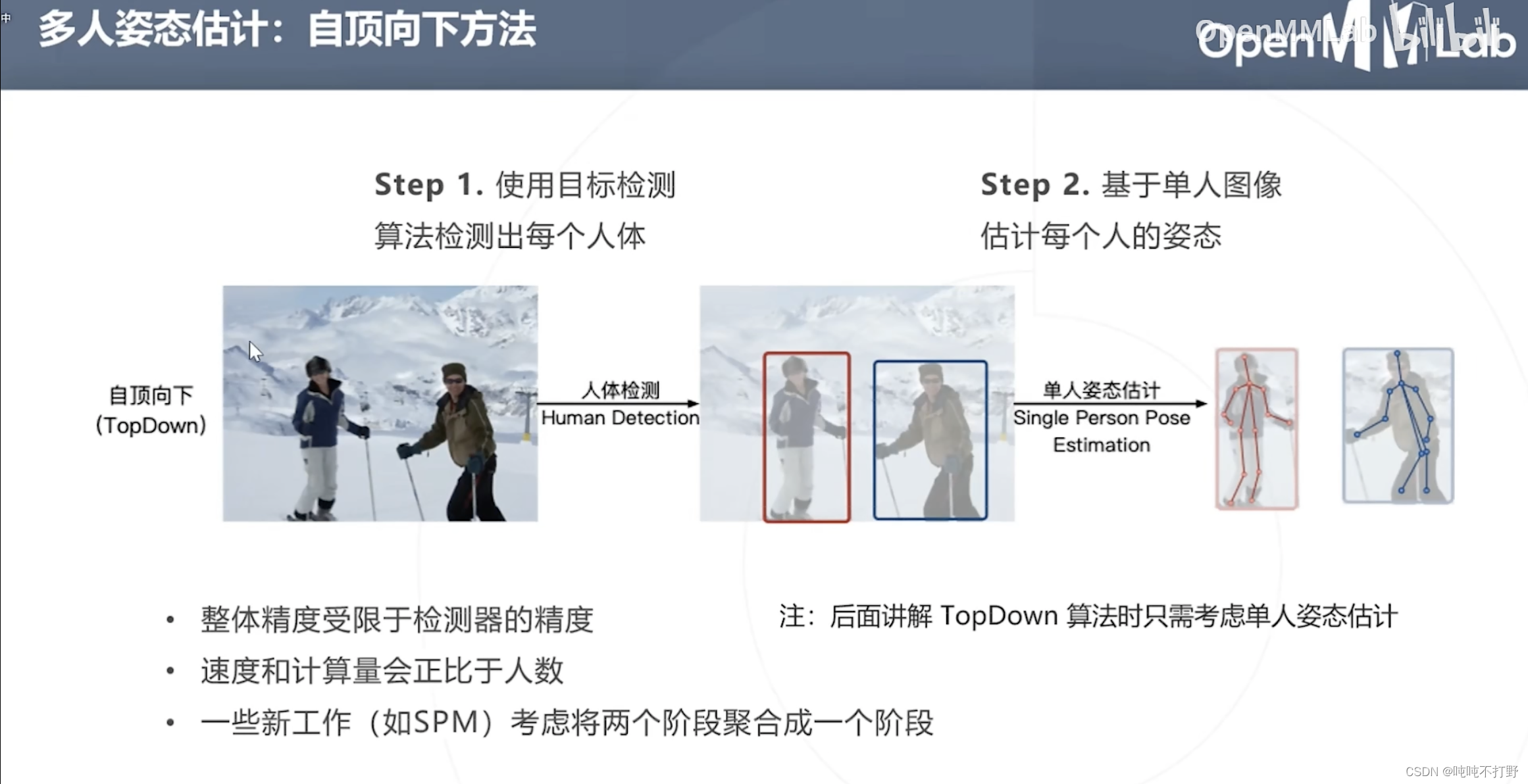
上面讲的是单人的姿态估计(人体姿态估计),但是实际上会有多人姿态估计
最直观的一种方式(自顶向下):
- 先目标检测,得到每个人(检测器的精度需要保证)
- 再对每个人进行 单人姿态估计
模型串联的坏处,
- 姿态估计结果会过分依赖人体目标检测的结果
- 速度和计算量和画面中的人数成正比
2.5 自底向上

自底向上方法:先把关键点检测完,再去聚类其属于哪个人
优点:
- 推理速度和画面中的人数无关
- 关键点多,则检测速度肯定也会慢一些。但不会像自顶向下方法一样与人数成正比,人数越多的时候,自底向上比自顶向下方法快的越明显)
- 聚类耗时肯定是和人数成正比的
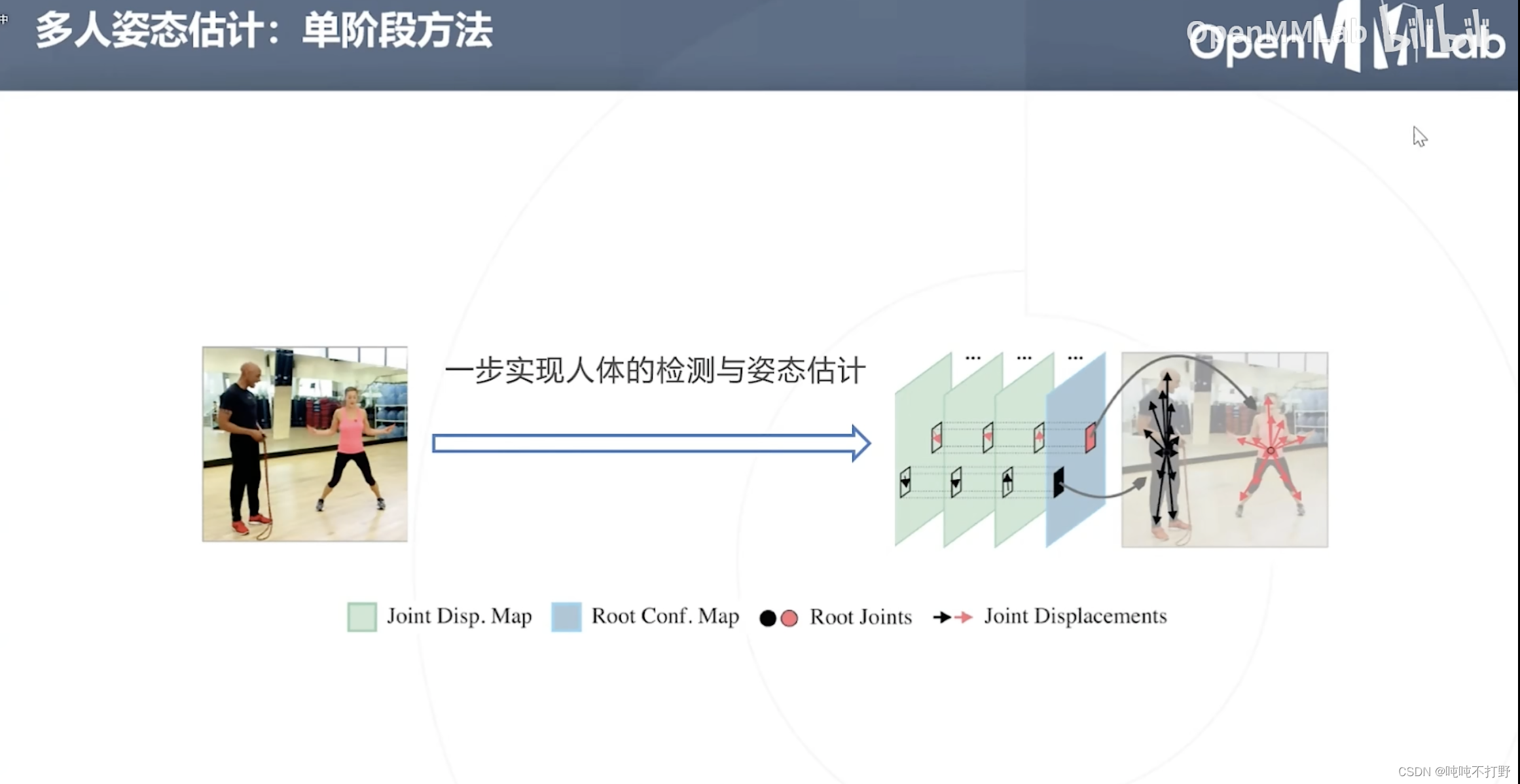
2.6 单阶段方法
2-2. 2D姿态估计详细说明
2.1 基于回归的自顶向下方法
2.1.1 经典方法

以分类网络为基础,将最后一层分类改为回归,一次性预测所有J个关键点的坐标
- 如果是人体姿态估计的话,就是18个关键点的坐标,在2D场景下,也就是要预测36个数字。。。(回归36个数字,可比分类36个类要难,目标检测里也有回归box四个坐标的方法
) - 原始论文是用AlexNet主干+回归头做的,主干(backbone)也可以换成ResNet等结构
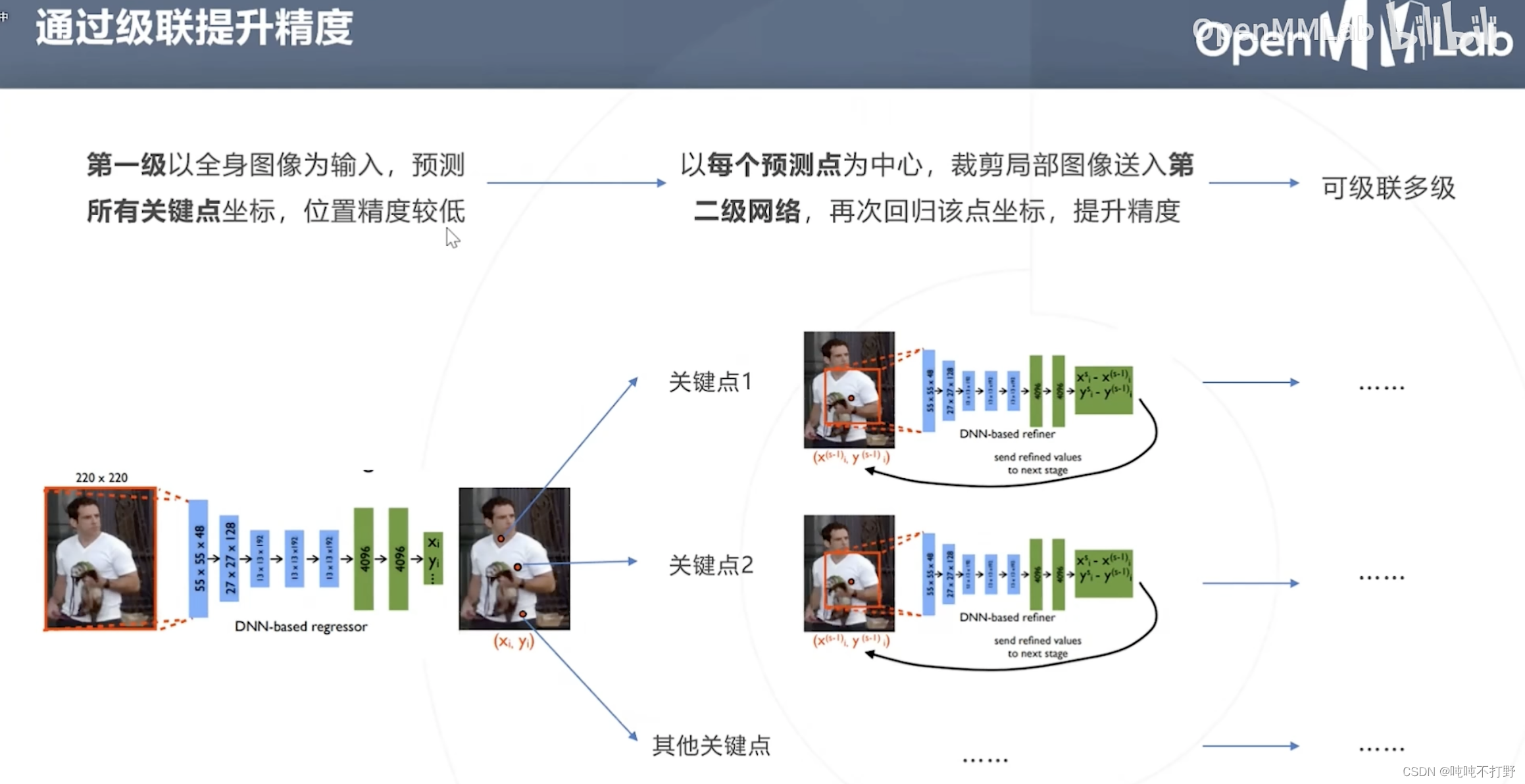
网络结构不变的情况下,使用级联模型的方式,来提高精度。
- 第一级,输入:全身图像
- 第二级,输入:第一步预测点为中心的裁剪后的局部区域
类似医疗影像分割里的级联:
- 第一级,输入:医疗影像
- 第二级,输入:医疗影像+第一级得到的概率图
优势:
- 回归模型理论上可以达到无限精度,热力图方法的精度受限于特征图的空间分辨率(也不一定,加个期望上去有时候也可以突破这个限制)
- 回归模型不需要维持高分辨率特征图,计算更高效。相比之下,热力图方法的特征图的size不能低于热力图的size,所以热力图方法确实要计算和存储高分辨率特征图,计算成本(硬件要求)更高
劣势:
- 图像到关键点坐标的映射是高度非线性的,导致直接回归坐标,比通过热力图(概率)得到坐标更难,同时回归方法的精度也低于热力图,因此DeepPose提出之后很长一段时间,2D关键点预测算法主要都是基于热力图的。
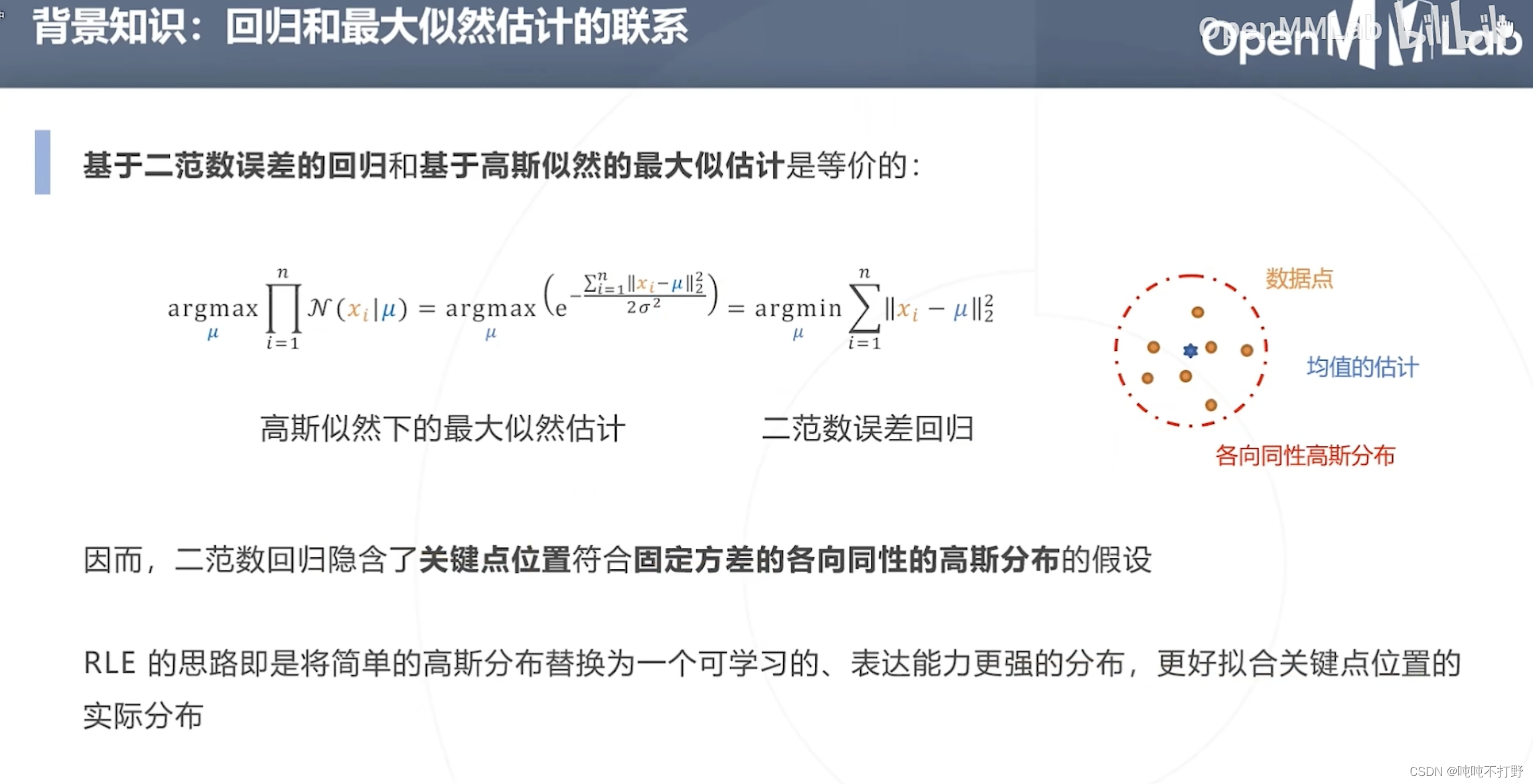
2.1.2 基于最大似然估计的改进
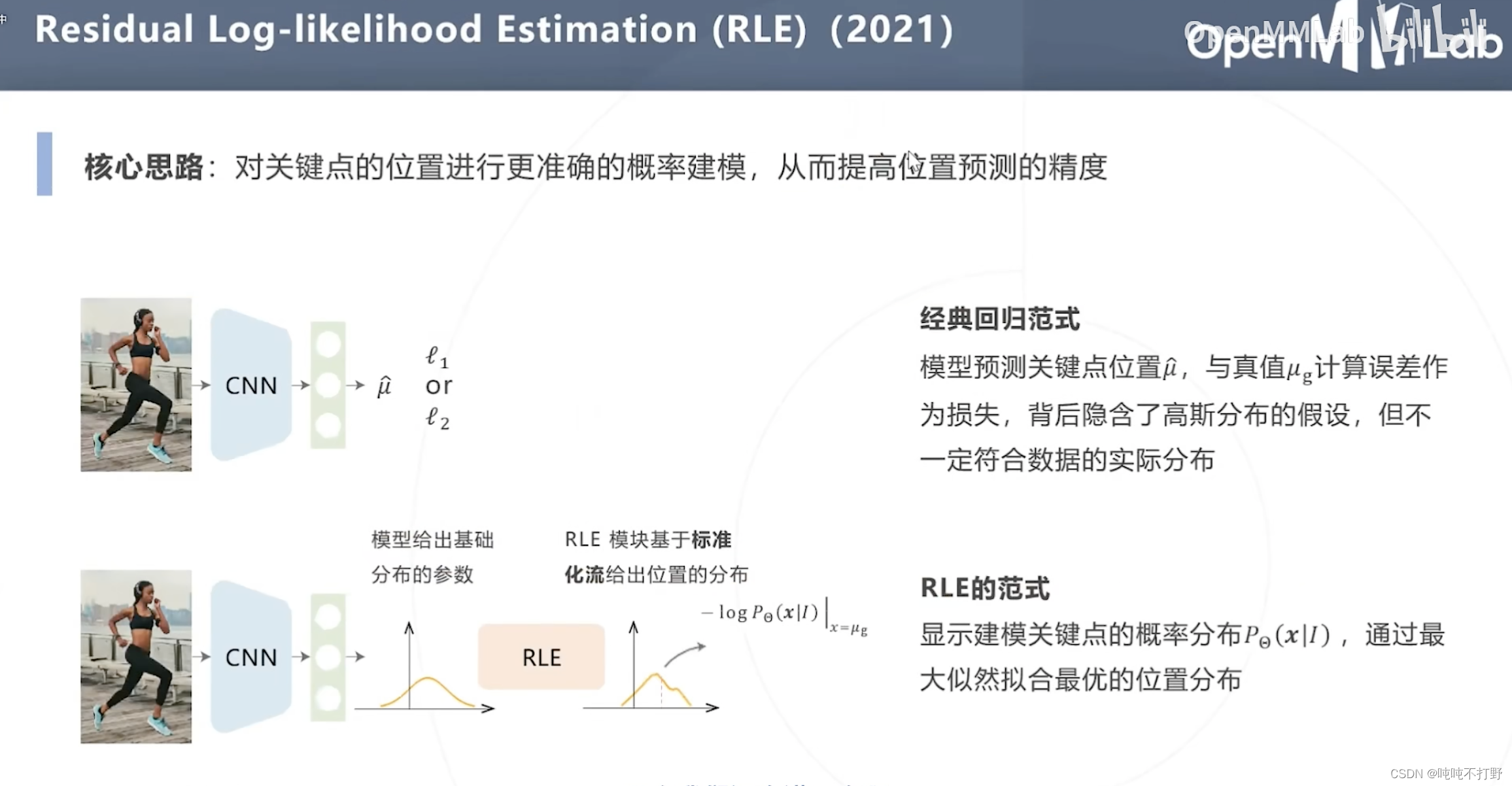
之前的基于回归方法的姿态估计,
- 损失函数为:真实关键点位置 μ g \mu_g μg与模型预测关键点位置 μ ~ \tilde\mu μ~的误差作为损失
- 这背后隐含了高斯分布的假设,即:预测点距离关键点越近,就越好,因此以关键点为圆心,相同半径圆周上的点作为预测点,其误差都是一样的。即:认为预测点分布在真实点形成的一个圆形里。
- 但是实际上,人体的关节有不同的形状如下图(踝关节,红色是关键点,蓝色围成的区域就是分布,不是个圆形,不是只靠一个方向的距离就可以衡量误差的):

另外,这篇文章创新点的部分,这个老师讲了基本等于没讲,论文也放的很少,有兴趣可能需要自己再进一步调研

论文就直接在MMPose里找了,这里Topdown Regression + Mobilenetv2 + Rle on Coco
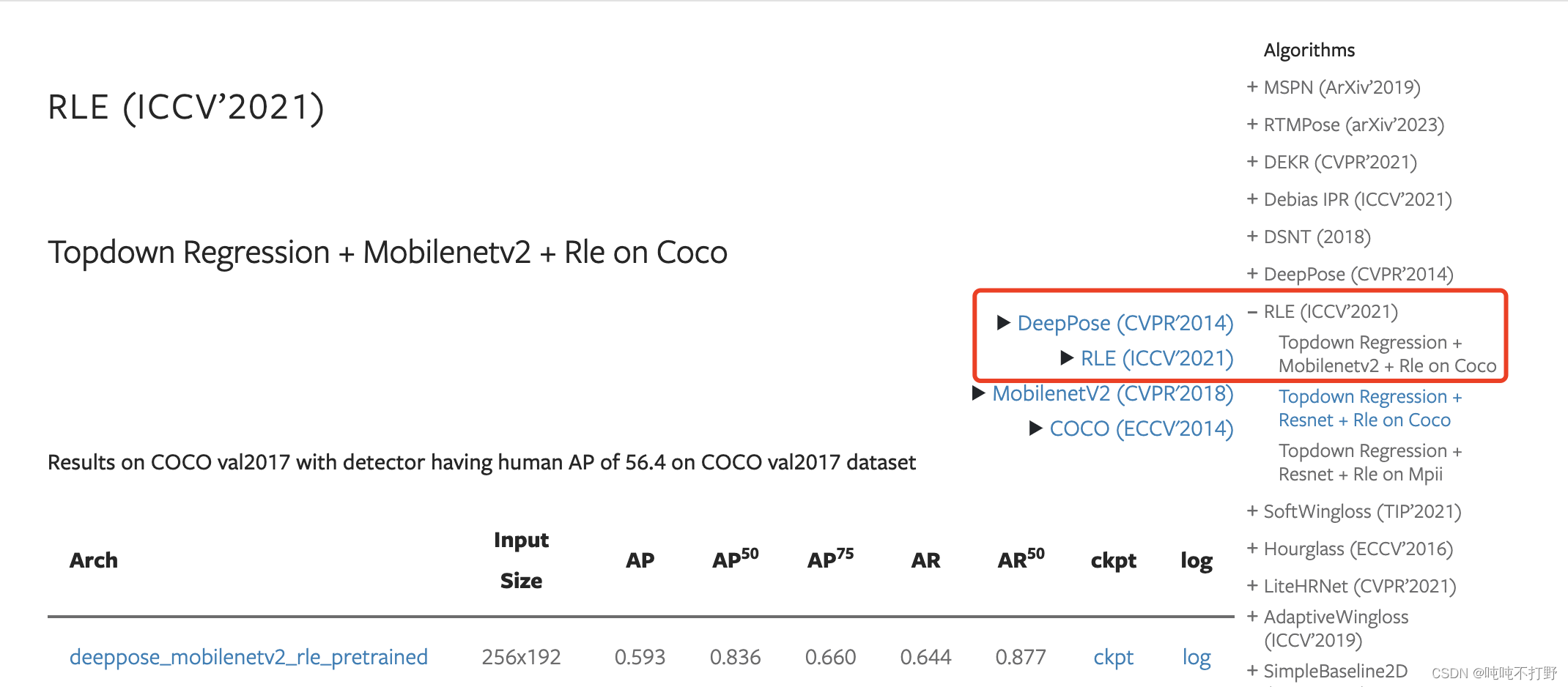
论文arxiv链接:Human Pose Regression with Residual Log-likelihood Estimation