/*** 注意: Astra2、Gemini2 和 Gemini2L 相机目前仅支持 Windows 以及 Linux 内核版本不高于4.15,更高版本的 Linux 内核可能会有异常。
*/#include <opencv2/videoio.hpp> // 包含为视频捕捉提供的功能
#include <opencv2/highgui.hpp> // 包含高层GUI(图形用户界面)功能
#include <opencv2/imgproc.hpp> // 包含图像处理功能
#include <iostream> // 包含标准输入输出流库using namespace cv; // 使用cv命名空间
int main()
{// 尝试打开摄像头VideoCapture obsensorCapture(0, CAP_OBSENSOR);// 如果摄像头打开失败if(!obsensorCapture.isOpened()){std::cerr << "Failed to open obsensor capture! Index out of range or no response from device";return -1;}// 获取obsensor相机的内参double fx = obsensorCapture.get(CAP_PROP_OBSENSOR_INTRINSIC_FX);double fy = obsensorCapture.get(CAP_PROP_OBSENSOR_INTRINSIC_FY);double cx = obsensorCapture.get(CAP_PROP_OBSENSOR_INTRINSIC_CX);double cy = obsensorCapture.get(CAP_PROP_OBSENSOR_INTRINSIC_CY);std::cout << "obsensor camera intrinsic params: fx=" << fx << ", fy=" << fy << ", cx=" << cx << ", cy=" << cy << std::endl;Mat image; // 创建用于存放图像的矩阵Mat depthMap; // 创建用于存放深度图的矩阵Mat adjDepthMap; // 创建用于存放调整后的深度图的矩阵// 设置深度值的最小和最大范围const double minVal = 300; // 深度值的最小值const double maxVal = 5000; // 深度值的最大值while (true){// 注释代码:用于捕获深度图像// obsensorCapture >> depthMap;// 另一种方法捕获深度图(和bgr彩色图像)。if (obsensorCapture.grab()){if (obsensorCapture.retrieve(image, CAP_OBSENSOR_BGR_IMAGE)){// 显示RGB彩色图像imshow("RGB", image);}if (obsensorCapture.retrieve(depthMap, CAP_OBSENSOR_DEPTH_MAP)){// 转换深度图到CV_8U,并进行调整,以便进行可视化depthMap.convertTo(adjDepthMap, CV_8U, 255.0 / (maxVal - minVal), -minVal * 255.0 / (maxVal - minVal));// 应用颜色映射,使深度图可视化更直观applyColorMap(adjDepthMap, adjDepthMap, COLORMAP_JET);// 显示调整后的深度图imshow("DEPTH", adjDepthMap);}// 将深度图覆盖在bgr图像上static const float alpha = 0.6f;if (!image.empty() && !depthMap.empty()){// 再次调整并转换深度图depthMap.convertTo(adjDepthMap, CV_8U, 255.0 / (maxVal - minVal), -minVal * 255.0 / (maxVal - minVal));// 改变大小以与彩色图像相匹配cv::resize(adjDepthMap, adjDepthMap, cv::Size(image.cols, image.rows));for (int i = 0; i < image.rows; i++){for (int j = 0; j < image.cols; j++){// 混合像素值以获得深度覆盖效果cv::Vec3b& outRgb = image.at<cv::Vec3b>(i, j);uint8_t depthValue = 255 - adjDepthMap.at<uint8_t>(i, j);if (depthValue != 0 && depthValue != 255){outRgb[0] = (uint8_t)(outRgb[0] * (1.0f - alpha) + depthValue * alpha);outRgb[1] = (uint8_t)(outRgb[1] * (1.0f - alpha) + depthValue * alpha);outRgb[2] = (uint8_t)(outRgb[2] * (1.0f - alpha) + depthValue * alpha);}}}// 显示深度信息叠加到彩色图上的图像imshow("DepthToColor", image);}// 释放图像矩阵占用的内存image.release();depthMap.release();}// 如果检测到按键,则退出循环if (pollKey() >= 0)break;}return 0;
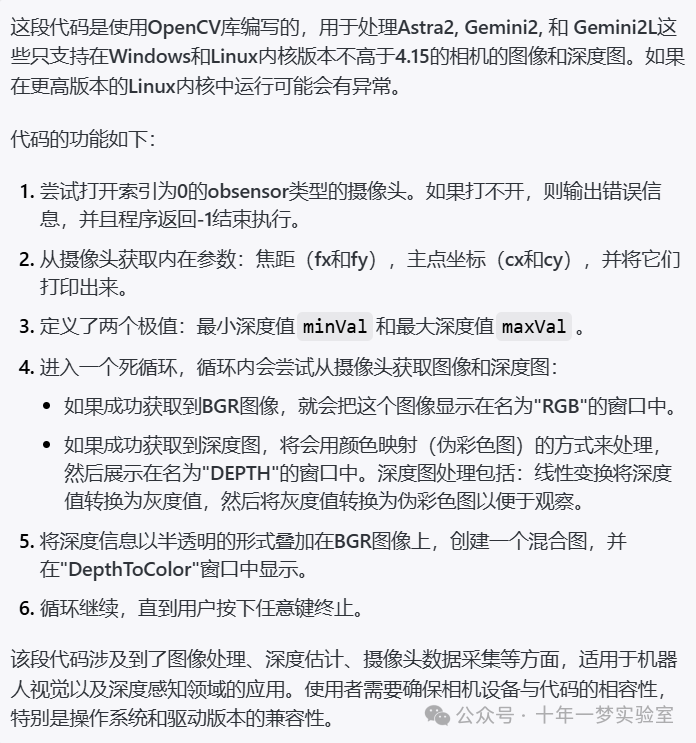
}这段代码实现的功能是使用opencv库来读取和处理通过OBSENSOR摄像头获取的视频流数据。它会尝试打开摄像头,读取摄像头的内参,并不断地捕获视频帧和深度信息。视频帧将以RGB的形式显示,深度信息将会通过调整转换成为可视化的彩色深度图,并显示出来。此外,它还提供了将深度图与RGB图像相结合显示的功能,这通过混合两个图像的像素值实现。整个过程将持续进行,直到检测到按键操作为止。
depthMap.convertTo(adjDepthMap, CV_8U, 255.0 / (maxVal - minVal), -minVal * 255.0 / (maxVal - minVal));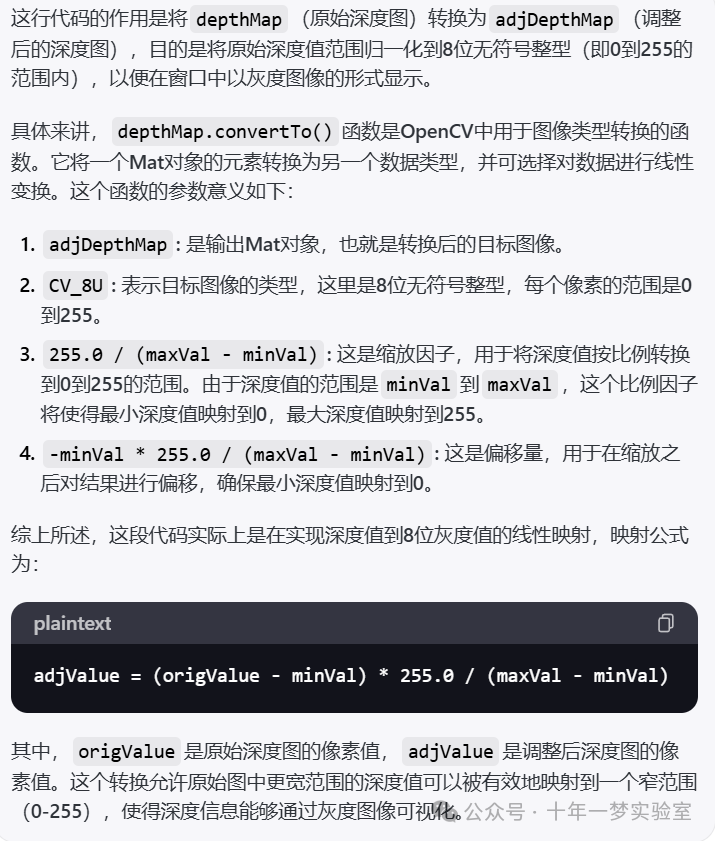
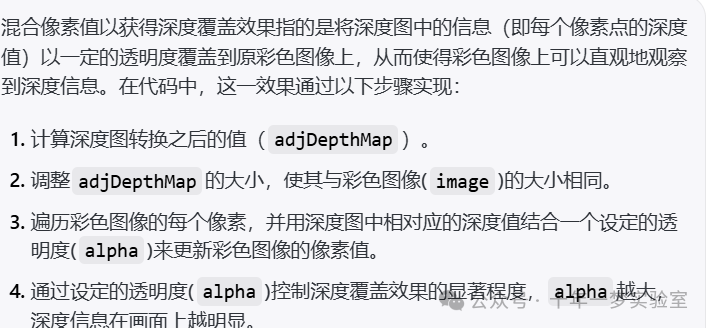
混合像素值以获得深度覆盖效果
// 设置混合的透明度值
static const float alpha = 0.6f; // 可以理解为深度信息在混合中的占比
if (!image.empty() && !depthMap.empty())
{// 对深度图进行调整和转换depthMap.convertTo(adjDepthMap, CV_8U, 255.0 / (maxVal - minVal), -minVal * 255.0 / (maxVal - minVal));// 改变深度图大小以匹配彩色图像的尺寸cv::resize(adjDepthMap, adjDepthMap, cv::Size(image.cols, image.rows));// 遍历图像的每个像素for (int i = 0; i < image.rows; i++){for (int j = 0; j < image.cols; j++){// 获取彩色图像中的像素值cv::Vec3b& outRgb = image.at<cv::Vec3b>(i, j);// 获取深度图中对应的深度值(通过255减去是为了反转深度值,让高值显得更亮)uint8_t depthValue = 255 - adjDepthMap.at<uint8_t>(i, j);// 如果深度值有效(非0且非满值)if (depthValue != 0 && depthValue != 255){// 用alpha值混合原像素值和深度值,更新彩色图像的像素值outRgb[0] = (uint8_t)(outRgb[0] * (1.0f - alpha) + depthValue * alpha);outRgb[1] = (uint8_t)(outRgb[1] * (1.0f - alpha) + depthValue * alpha);outRgb[2] = (uint8_t)(outRgb[2] * (1.0f - alpha) + depthValue * alpha);}}}// 显示混合了深度信息的彩色图像imshow("DepthToColor", image);
}在这个代码中,alpha决定了混合时原图像和深度图的占比,alpha越大,则深度图的信息占比越重,覆盖效果越明显;相反,如果alpha较小,则原图的颜色占比较重。通过这种方式,我们可以在彩色图像上“覆盖”深度信息,以视觉上的方式展示出物体的距离信息。