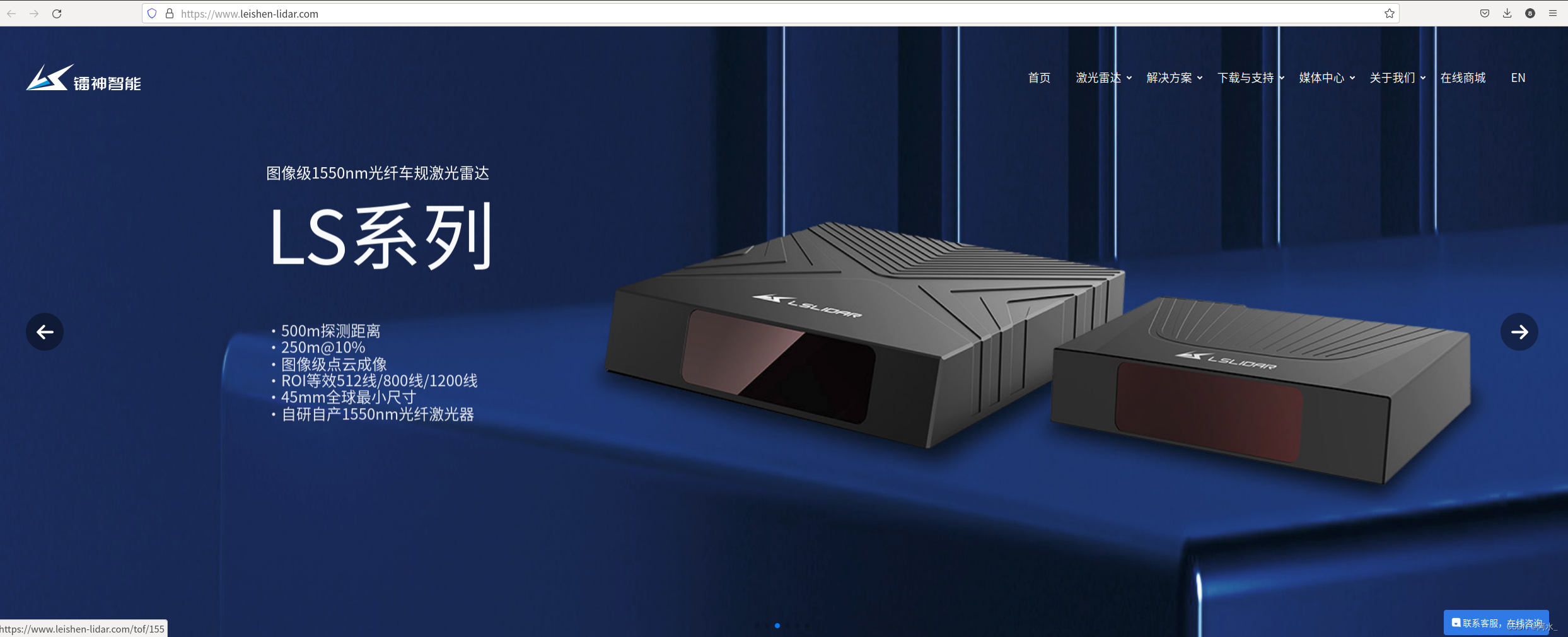
接到了老师的一个项目是要做相关的一个激光雷达的工作
其镭神智能官网为:镭神智能-全场景激光雷达及行业解决方案
在其相关内容索引中找到我们所属的型号:
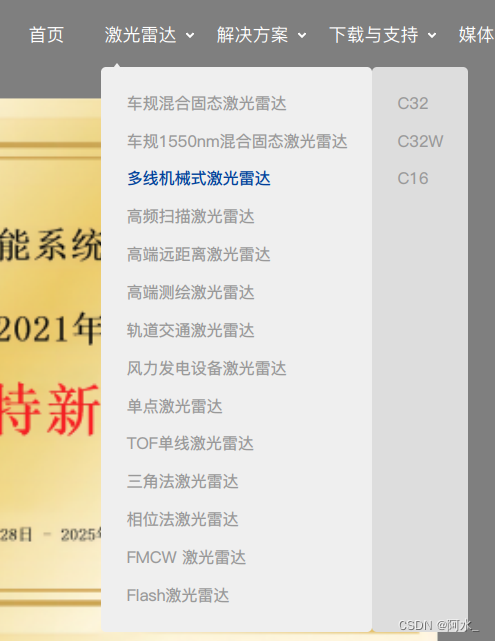
查询了相关的型号是“多线机械式激光雷达C32”

其官方视频看起来是相当酷炫的
话不多说,我们是来找资料的,然后就可以在官网的下载与支持中找到对应的资料下载
选择制定的型号便可以下载到相关资料

那么做ROS的话,有经验的朋友应该知道需要重要的ROS驱动,但是这里的产品资料好像没提供,确实如此,因此我在网上淘了一段时间资料,终于找到了官方在github上提供的驱动
以下为github链接:
GitHub - LS-Technical-Supporter/LS-LIDAR-C32ROS
下载完毕后即可进入正式流程
解压该文件,在README_cn.md中,说明了本版本驱动的已验证的功能
## 描述
**本版本只验证了机械32线雷达双端口,单双回波,垂直角度均匀1度和0.33度**
**驱动用ros1进行开发,支持ubuntu14.04,ubuntu16.04,ubuntu18.04下运行**
特此强调,不能使用ubuntu20.04(血泪教训)
特此强调,不能使用ubuntu20.04(血泪教训)
特此强调,不能使用ubuntu20.04(血泪教训)
然后就是安装ubuntu18.04开始相关的环境搭建
(在这个过程里还有个很痛苦的事情是我的有线网卡为R8125,无线网卡为AX210,均是比较新的网卡版本,ubuntu18.04都没有相应驱动,甚至一度让我以为我的ubuntu18.04是坏的,这也是我一开始使用了ubuntu20.04的原因。因此一开始装机有线网络连接和无限网络连接都没有,之能先用很菜的USB免驱wifi装好相应的驱动才能开始使用,可以见链接:
)
1.首先需要安装ROS系统
ubuntu18.04使用的为melodic版本,具体安装教程参照该文,几乎是保姆级教学,速度也很快。
Ubuntu18.04安装Ros(最新最详细亲测)_向日葵骑士Faraday的博客-CSDN博客_ubuntu18.04安装ros
2.创建工作空间
建议在主目录打开命令行,输入
mkdir -p ~/leishen_ws/src
cd ~/leishen_ws/src
tar –xvf lslidar_c32_V2.01.tar该操作内容是创建相应的工作空间并在src文件内解压tar文件
3.编译打包
cd ~/leishen_ws
catkin_make该操作为编译make环节,也是最容易出fatal error的环节,理论上前面按操作来基本上这边会比较顺利。
我在这个过程里报了一个fatal error
fatal error: pcap.h: 没有那个文件或目录说明没有pcap.h这个文件,因为代码里面用了#include <pcap.h>,在编译时,没有找到这个文件。
解决方法也很简单,这里就需要安装libpcap这个工具包,安装命令如下
sudo apt-get install libpcap-dev然后再次进行编译即可
catkin_make4.编译完毕后就可以运行了
输入代码
source ~/leishen_ws/devel/setup.bash
roslaunch lslidar_c32_decoder lslidar_c32.launch --screen有的同学source后显示“source是一个目录”
原因是因为官方文档中
其在leishen_ws/devel中多打了一个空格,去掉即可。
5.连接雷达(若连接操作已完毕,直接跳到7)
利用RJ45网络接口连接激光雷达后,进入设置——网络,修改IPV4地址

修改为如图所是示并应用即可


6.查看相关信息
ping 192.168.1.102ping通说明网络连接正常
sudo tcpdump -n -i eth0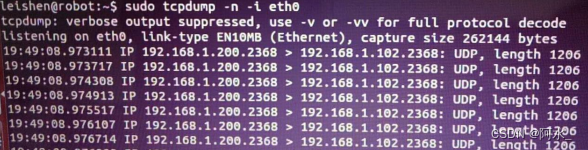
如图显示雷达发送到目的端数据包 1206 个字节,则表示雷达数据发送正常
备注:第一次i修改IP后,应将雷达断电重启
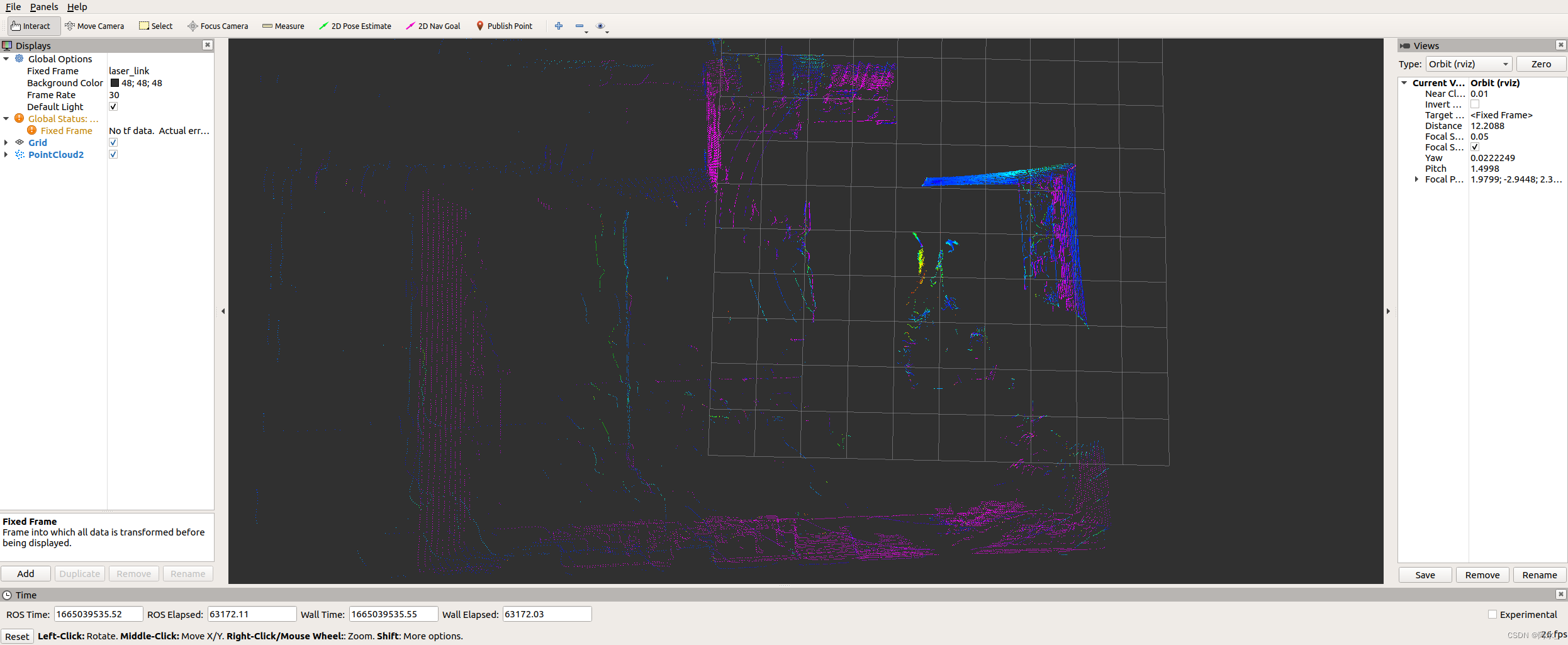
7.Rviz
打开一个新终端,输入
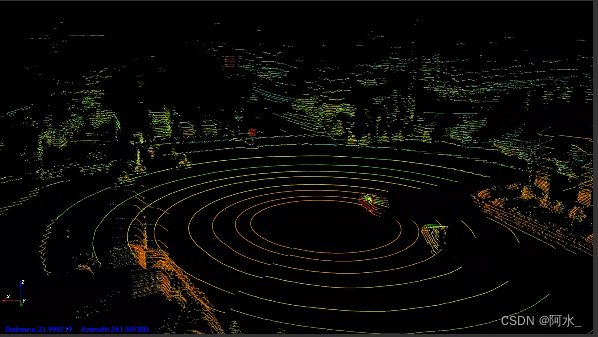
rosrun rviz rviz在弹出的 Displays 窗口中,将“Fixed Frame”的值修改成 laser_link 即可,同时点击 add 按钮,
在 By topic 下点击 PointCloud2 添加多线点云节点。
即可获得最终的显示结果