机器人在运动中伸展和提升功能,历来是比赛中机器人的一个重要的性能指标,因为按 比赛要求,机器人在上场前必须经过体积大小的检测,而在场地中如果能够有更好的伸展性 能将对比赛成绩十分有利,因此机器人提升自身高度以及提升物体的能力是机器人设计的一 个重要内容。
1 、简单机械臂
提升方式如图所示,很少直接利用电机提升机械臂,因为用电机直接连接机械臂的转动 轴不能够提供足够大的转动力矩,甚至会损坏电机,因此通常会使用齿轮组构建一个变速器 箱,通过降低转速提高提升的力矩。
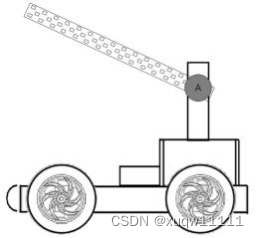
这种组装方式,结构简单,成本低,是较常用的抬升结构之一,所提升的全部重力落于支撑 点 A,A 点受力较大,同时尺寸受规则限制,组成抬升的构件不能太长,造成抬升高度有限。
改进型简单机械臂
在简单型机械臂的前端增加一个电机以延长机械臂,如图所示:

这种方法可以增加机械臂的提升高度,但未能解决 A 点受力较大的问题。
2、简单的平行四边形机械臂
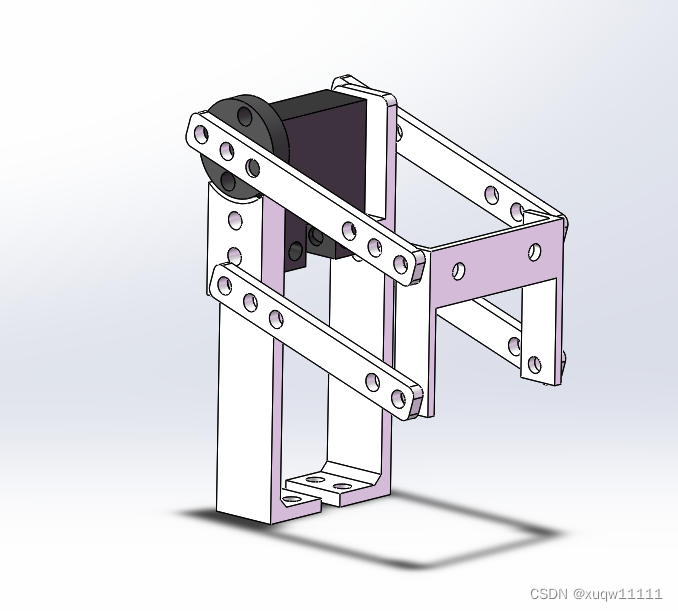
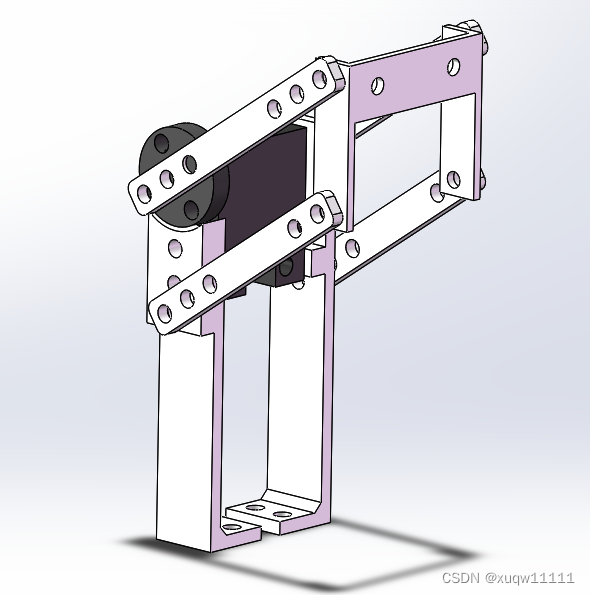
3、加强型的机械臂

加强型机械臂原理图
加强型机械臂效果图
这种机械臂和特点是当收回的时候占用体积较小,而展开时又可达到较好的延展效果。 同时由于机械臂与机器人主体结构具有两个支撑点,因此可以所持重物的重力分散于 A 、B 两个支撑点上,不易造成机械的损坏。
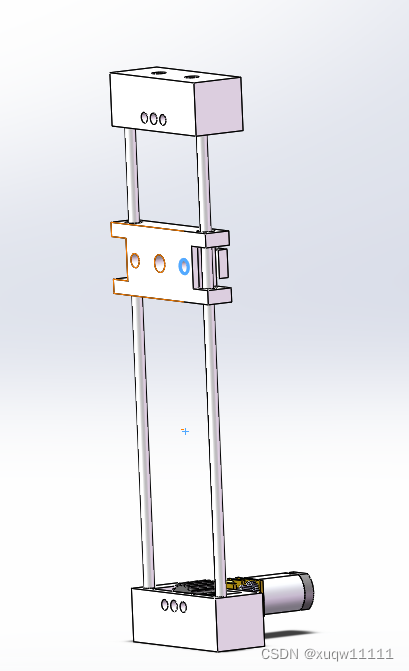
3 、滑动架与齿条提升结构
这一装置可以使提升与滑动装置非常稳定与有效,可用来制作滑杆垂直升降机构,如图所示

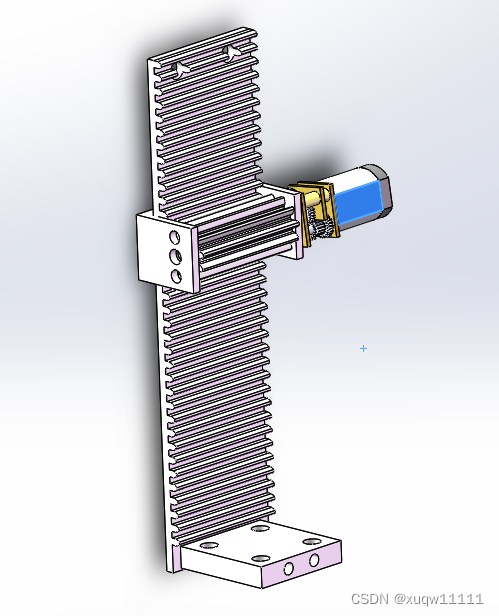
两级齿条提升装置

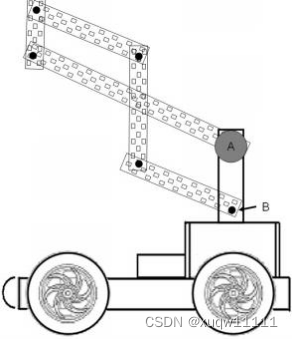
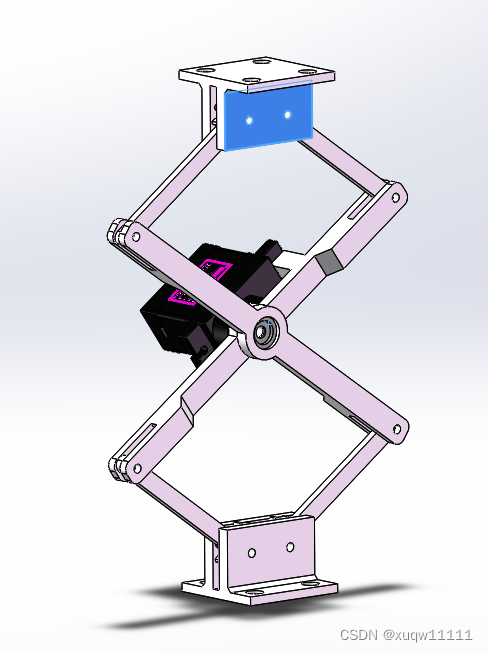
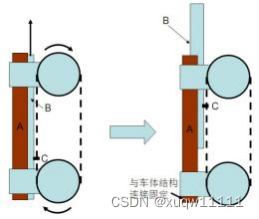
4 .平行四边形交叉升降
在机械设计中还常会用到一种平面连杆组成平行四边形交叉升降的装置,如图所示:
这种结构中 A 点是固定点,与车身结构相连接,B 点与滑动杆连接,可以水平移动。通过移动 B 点位置,或四边型的角度,达到提升的作用。这是一种常用的抬升结构之一,结构较复杂,初始状态时尺寸较小,抬升高度较高,并可随意改变,操作较灵活,在实际应用中 为提高支撑力度,通常会在图中 C、D 点的位置通过捆扎皮筋的方式以减少电机受力。制作实例如图所示:

5 .链条提升结构
链条提升也需要使用滑杆,其提升的原理为将用于提升的电机与齿轮与内外滑动杆之一 相对位置保持固定,而将运动的链条中的一点与另外一滑动杆捆绑,这样在链条运动时,就会带动捆绑的滑动杆一起运动。如图所示:
单级链条提升结构

二级链条提升结构

上图中链条没有绘制