欢迎关注我的CSDN:https://spike.blog.csdn.net/
本文地址:https://blog.csdn.net/caroline_wendy/article/details/130945234
Decaying Epsilon Greedy 算法是一种强化学习中的探索策略,可以平衡开发和探索之间的矛盾。基本思想是,以一个递减的概率 epsilon 随机选择一个动作,以 1-epsilon 的概率选择当前最优的动作。随着学习的进行,epsilon 逐渐减小,从而增加利用已知信息的机会,减少随机探索的次数。这种算法可以保证每个动作都有一定的概率被访问到,同时也可以收敛到最优策略。
1. 强化学习
强化学习(Reinforcement Learning):强化学习是机器通过与环境交互来实现目标的一种计算方法。
关注于:序列决策制定(Sequential Decision Making)
强化学习使用智能体或代理(Agent)表示做决策的机器,Agent包括3个要素,即感知(State)、决策(Action)、奖励(Return)。
类似于随机过程:
下一刻的状态 ∼ P ( ⋅ ∣ 当前状态,智能体动作 ) 下一刻的状态 \sim P(·|当前状态,智能体动作) 下一刻的状态∼P(⋅∣当前状态,智能体动作)
在交过过程中,每一轮获得的奖励信号可以进行累加,形成智能体的整体回报(Return),而回报的期望,就是价值(Value)。
强化学习的数据分布,即占用度量(Occupancy Measure)。
有监督学习,数据分布不变,优化模型:
最优模型 = a r g m i n 模型 E ( 特征、标签 ) ∼ 数据分布 [ 损失函数 ( 标签,模型 ( 特征 ) ) ] 最优模型 = \underset{模型}{arg \ min} \ E_{(特征、标签)\sim数据分布}[损失函数(标签,模型(特征))] 最优模型=模型arg min E(特征、标签)∼数据分布[损失函数(标签,模型(特征))]
强化学习,数据分布变化,优化策略:
最优策略 = a r g m a x 策略 E ( 状态、动作 ) ∼ 策略的占用度量 [ 奖励函数 ( 状态、动作 ) ] 最优策略 = \underset{策略}{arg \ max} \ E_{(状态、动作) \sim 策略的占用度量}[奖励函数(状态、动作)] 最优策略=策略arg max E(状态、动作)∼策略的占用度量[奖励函数(状态、动作)]
2. 多臂老虎机问题
多臂老虎机(Multi-Armed Bandit)问题,只有动作和奖励,没有状态,主要关注于探索(Exploration)和利用(Exploitation),即探索拉杆的获奖概率,根据经验选择获奖最多的拉杆(根据期望),设计策略,平衡探索和利用的次数,使得累积奖励最大化。
懊悔值(Regret)类似于损失值,最大化累积奖励,等价于最小化累积懊悔。
期望更新公式, r k r_{k} rk 是第 k 次的奖励值,增量更新的时间复杂度O(1):
Q k = Q k − 1 + 1 k [ r k − Q k − 1 ] Q_{k} = Q_{k-1} + \frac{1}{k}[r_{k} - Q_{k-1}] Qk=Qk−1+k1[rk−Qk−1]
3. Decaying Epsilon Greedy 算法
ϵ - G r e e d y \epsilon \ \text{-} \ Greedy ϵ - Greedy 算法,在完全贪婪算法的基础上,增加噪声 ϵ \epsilon ϵ,每次以概率 1 − ϵ 1-\epsilon 1−ϵ 选择以往经验中期望奖励估值最大的拉杆(利用),以概率 ϵ \epsilon ϵ 随机选择一根拉杆(探索),公式如下:
a i = { a r g m a x a ∈ A Q ( a ) ,采样概率 1 − ϵ 从 A 中随机选择,采样概率 ϵ a_{i} = \begin{cases} arg \ \underset{a \in A}{max} \ Q(a),采样概率 \ 1-\epsilon \\ 从A中随机选择,采样概率 \ \epsilon \\ \end{cases} ai={arg a∈Amax Q(a),采样概率 1−ϵ从A中随机选择,采样概率 ϵ
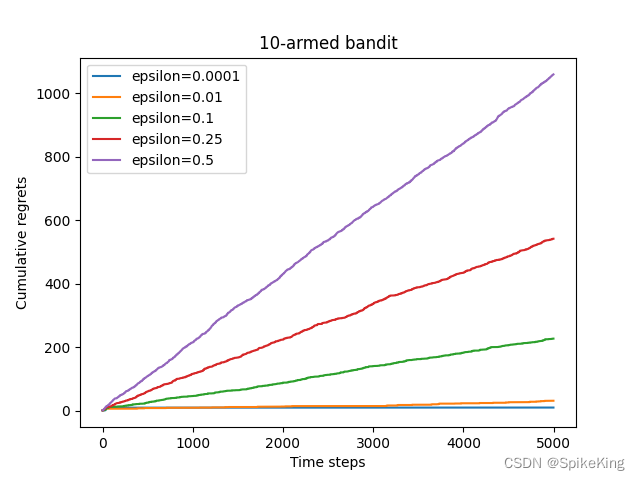
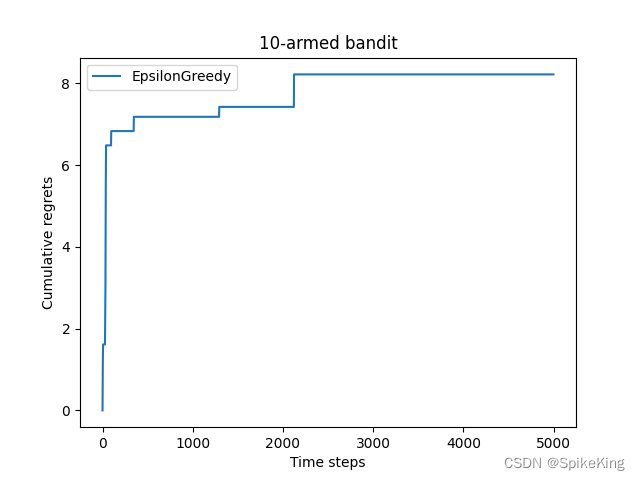
ϵ - G r e e d y \epsilon \ \text{-} \ Greedy ϵ - Greedy 算法,累积懊悔是线性增长的。优化的 D e c a y i n g ϵ - G r e e d y Decaying \ \epsilon \ \text{-} \ Greedy Decaying ϵ - Greedy 算法, ϵ \epsilon ϵ 值随时间 t t t 衰减,反比例衰减,即 ϵ = 1 t \epsilon = \frac{1}{t} ϵ=t1 累计懊悔是次线性(sublinear)增长的,优于 ϵ - G r e e d y \epsilon \ \text{-} \ Greedy ϵ - Greedy 算法。
ϵ - G r e e d y \epsilon \ \text{-} \ Greedy ϵ - Greedy 算法:
D e c a y ϵ - G r e e d y Decay \ \epsilon \ \text{-} \ Greedy Decay ϵ - Greedy 算法:
源码如下:
class BernoulliBandit(object):"""经典的 Bernoulli 多臂老虎机"""def __init__(self, K, seed=42):np.random.seed(seed)self.probs = np.random.uniform(size=K)self.best_idx = np.argmax(self.probs)self.best_prob = self.probs[self.best_idx]self.K = Kprint(f"随机生成一个 {K} 臂的伯努利老虎机")print(f"老虎机获奖概率: {[round(i, 4) for i in self.probs]}")print(f"获奖概率最大的拉杆是 {self.best_idx} 号,相应的获奖概率是 {round(self.best_prob, 4)}")def step(self, k):if np.random.rand() < self.probs[k]:return 1else:return 0class Solver(object):"""MAB 求解的基类"""def __init__(self, bandit):self.bandit = banditself.counts = np.zeros(self.bandit.K) # 记录动作选择数量self.regret = 0. # 累计懊悔值self.actions = [] # 记录每一步的动作self.regrets = [] # 记录每一步的懊悔def update_regret(self, k):"""更新懊悔值"""self.regret += self.bandit.best_prob - self.bandit.probs[k] # 概率懊悔值self.regrets.append(self.regret) # 记录概率懊悔值def run_one_step(self):"""返回拉动哪一根拉杆1. 根据策略选择动作2. 根据动作获得奖励3. 更新期望奖励估值"""raise NotImplementedErrordef run(self, num_steps): # 执行for _ in range(num_steps):k = self.run_one_step() # 动作是kself.counts[k] += 1 # 更新选择次数self.actions.append(k)self.update_regret(k) # 更新懊悔值class EpsilonGreedy(Solver):"""Epsilon Greedy 算法"""def __init__(self, bandit, epsilon=0.01, init_prob=1.0):super(EpsilonGreedy, self).__init__(bandit)self.epsilon = epsilon# 初始化全部拉杆的期望,后续逐渐更新self.estimates = np.array([init_prob] * self.bandit.K)def run_one_step(self):if np.random.random() < self.epsilon:k = np.random.randint(0, self.bandit.K) # 随机选择一个拉杆else:k = np.argmax(self.estimates) # 选择最大期望的拉杆r = self.bandit.step(k)# 更新期望,先run,再更新count,所以count+1,更新期望self.estimates[k] += 1. / (self.counts[k] + 1) * (r - self.estimates[k])return kclass DecayingEpsilonGreedy(Solver):"""随着时间衰减的 Epsilon-Greedy 算法"""def __init__(self, bandit, init_prob=1.0):super(DecayingEpsilonGreedy, self).__init__(bandit)self.estimates = np.array([init_prob] * self.bandit.K)self.total_count = 0def run_one_step(self):self.total_count += 1epsilon = 1 / self.total_countif np.random.random() < epsilon:k = np.random.randint(0, self.bandit.K)else:k = np.argmax(self.estimates)r = self.bandit.step(k)self.estimates[k] += 1 / (self.counts[k] + 1) * (r - self.estimates[k])return k