目录
- 串口资源
- 资源配置
- 同步模式
- 单线半双工模式
- 中断
- DMA
- 串口的初始化
- 串口通信的实现
串口资源
资源配置
CH32V208 系列,是基于 RISC-V 指令架构设计的 32 位 RISC 内核 MCU,根据封装的不同,可用的USART串口资源如下表所示:
 且USART具有如下主要特征:
且USART具有如下主要特征:
(1)全双工或半双工的同步或异步通信
(2) 支持分数波特率发生器,最高 9Mbps
(3)可编程数据长度、停止位长度
(4)支持 LIN,IrDA 编码器,智能卡
(5)支持 DMA
(6)支持多种中断
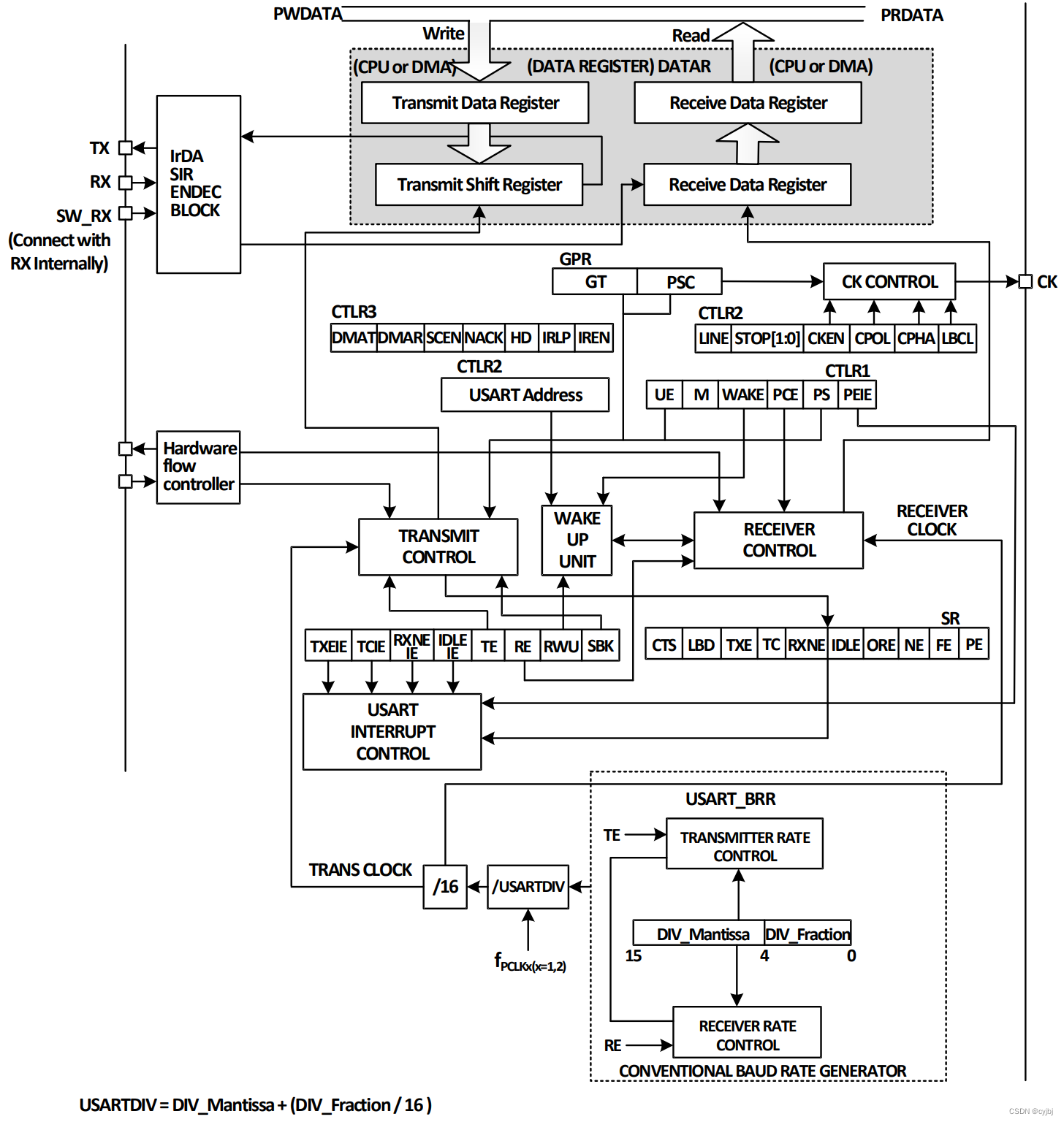
其内部模块图实现如下:
同步模式
和其他单片机不同的是,ch32V208处理器的USART还支持同步模式,就是说系统在使用 USART 模块时可以输出时钟信号。在开启同步模式对外发送数据时,CK引脚会同时对外输出时钟。 要开启同步模式,只需要对控制寄存器 2(R16_USARTx_CTLR2)的 CLKEN 位置位,即可,但有两点注意:
(1)开启同步模式同时需要关闭LIN 模式、智能卡模式、红外模式和半双工模式,即保证 SCEN、HDSEL 和 IREN 位处于复位状态,这三位在控制寄存器 (R16_USARTx_CTLR3)中。
(2)USART 模块同步模式只工作在主模式,即 CK 引脚只输出时钟,不接收输入;
只在 TX 引脚输出数据时输出时钟信号;
单线半双工模式
半双工模式支持使用单个引脚(只使用 TX 引脚)来接收和发送,TX 引脚和 RX 引脚在芯片内部连接。 开启半双工模式的方式是对控制寄存器 3(R16_USARTx_CTLR3)的 HDSEL 位置位,但同时需要关闭 LIN 模式、智能卡模式、红外模式和同步模式,即保证 SCEN、CLKEN 和 IREN 位处于复位状态,这三位在控制寄存器 2 和 3(R16_USARTx_CTLR2 和 R16_USARTx_CTLR3)中。 设置成半双工模式之后,需要把 TX 的 IO 口设置成浮空输入或开漏输出高模式。在 TE 置位的情况下,只要将数据写到数据寄存器上,就会发送出去。
中断
ch32V208处理器的USART 模块支持多种中断源,包括发送数据寄存器空(TXE)、CTS、发送完成(TC)、接收数据就绪(TXNE)、数据溢出(ORE)、线路空闲(IDLE)、奇偶校验出错(PE)、断开标志(LBD)、噪声(NE)、多缓冲通信的溢出(ORE)和帧错误(FE)等等。
DMA
ch32V208处理器的USART 模块支持 DMA 功能,可以利用 DMA 实现快速连续收发。当启用 DMA 时,TXE 被置位时,DMA就会从设定的内存空间向发送缓冲区写数据。当使用 DMA 接收时,每次 RXNE 置位后,DMA 就会将接收缓冲区里的数据转移到特定的内存空间。
串口的初始化
ch32V208处理器的USART通信模式较多,下面以最常用的双工通信模式为例来介绍实现过程,本例程中,使用USART1和USART2,通过外部交叉连接实现全双工的串口通信功能,实现代码如下
void USARTx_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
USART_InitTypeDef USART_InitStructure = {0};
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2 | RCC_APB1Periph_USART3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);/* USART1 TX-->B.6 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; /* Only Configure TX Pin */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_Remap_USART1, ENABLE);/* USART2 TX-->A.2 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; /* Only Configure TX Pin */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_Init(USART1, &USART_InitStructure);
USART_Init(USART2, &USART_InitStructure);USART_Cmd(USART1, ENABLE);
USART_Cmd(USART2, ENABLE);USART_HalfDuplexCmd(USART1, ENABLE);
USART_HalfDuplexCmd(USART2, ENABLE);
}
串口通信的实现
双串口的收发通信实现包括两部分,USART1的发送和USART2的接收,以及USART1的发送和USART1的接收两个过程,实现方法是完全一样的,USART1—>USART2的实现如下:
while(TxCnt1 < TxSize1) /* USART1--->USART2,TxSize1为发送个数 */{while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET) /* 等待串口1的当前数据发送完成 */{}USART_SendData(USART1, TxBuffer1[TxCnt1++]);//等待接收完成while(USART_GetFlagStatus(USART2, USART_FLAG_RXNE) == RESET){}RxBuffer2[RxCnt2++] = USART_ReceiveData(USART2); //把接收数据存放到usart2的接收缓冲区}