目录
- 简介
- 总线拓扑
- 总线操作
- “无响应” 和 “无数据” 操作
- 多块读写操作
- 数据流读写操作
- 总线协议
- 命令
- 响应
- R1/R1b (普通命令响应)
- R2 (CID, CSD 寄存器)
- R3 (OCR 寄存器)
- R4 (Fast IO)
- R4b(Fast IO)
- R5 (中断请求)
- R5b(中断请求)
- R6 (发布的RCA响应)
- R7 (卡接口条件)
- SD卡操作模式
- 卡识别
- 数据操作模式
- 例程
简介
SDIO(Secure Digital Input and Output)全称安全的数字输入输出接口;是从SD内存卡接口的基础上演化出来的一种外设接口。SDIO接口兼容以前的SD内存卡,并且可以连接支持SDIO接口的设备。它可以连接SD 卡、SD I/O卡、多媒体卡(MMC)和 CE-ATA卡主机接口;除了连接常见的存储介质外,它还可以用于连接WiFi、GPS、摄像头等设备。
本文基于GD32F470ZGT6芯片,其SDIO外设对存储卡的兼容性如下:
- MMC:与多媒体卡系统规格书 V4.2 及之前的版本全兼容。有三种不同的数据总线模式:
1 位(默认)、4 位和 8 位; - SD 卡:与 SD 存储卡规格版本 2.0 全兼容;
- SD I/O:与 SD I/O 卡规格版本 2.0 全兼容,有两种不同的数据总线模式:1 位(默认)和 4
位; - CE-ATA:与 CE-ATA 数字协议版本 1.1 全兼容;
总线拓扑

SDIO外设通过时钟线(CLK)、命令线(CMD)和数据线(DATA)进行通讯;其中,根据SDIO模式的不同数据线的数量也会有不同,分别有1bit模式、4bit模式和8bit模式。
在SDIO总线上的每一个消息都是由以下3个部分组成的:
- 命令:命令是启动一个操作的令牌,从主机发送到卡;由CMD线进行传输。
- 响应:响应是从卡发送到主机,作为命令的回应;由CMD线进行传输。
- 数据:数据可以从卡传输到主机或者从主机传输到卡;通过DATA线传送。
其中SDIO的命令也分为2种——流命令和面向块的命令。
- 流命令:这些命令发起连续的数据流,只有当 CMD 信号线上出现停止命令时,数据传输
终止。该模式将命令的开销减少到最低(仅支持 MMC)。 - 面向块的命令:这些命令成功发送一个数据块后紧跟一个 CRC 校验。读和写操作允许单
个或多个块传输。与连续读相同,当 CMD 信号线上出现停止命令时,多块传输终止。
总线操作
“无响应” 和 “无数据” 操作
总线上的基本操作是命令/响应操作,如下图;有“无响应”操作和“无数据”操作两种。
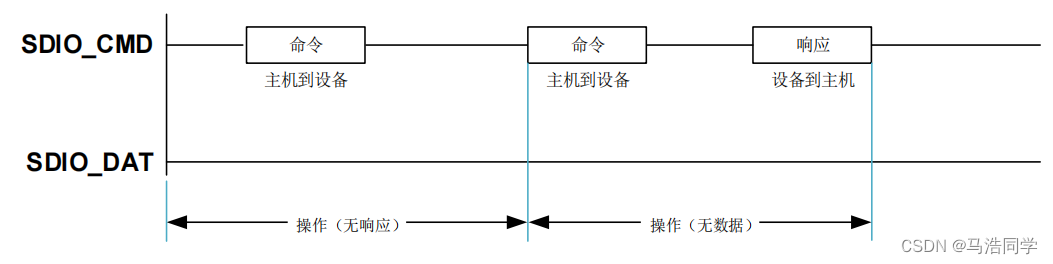
无响应操作即主机只发送命令,但设备不响应;无数据操作即主机发送命令,设备响应,但设备和主机都不发送数据。
多块读写操作
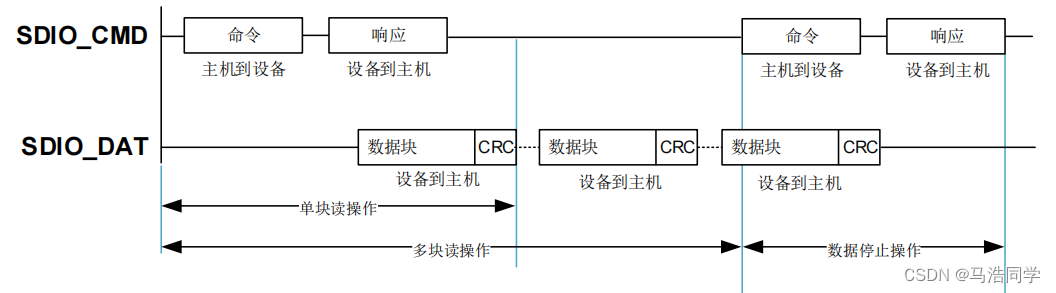
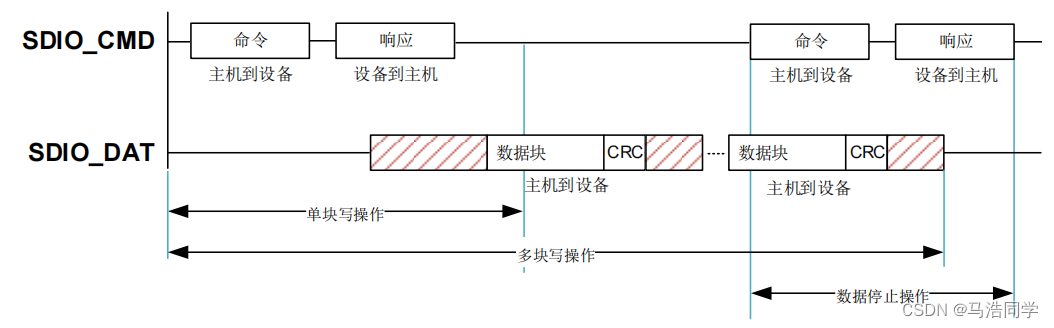
多块读操作即主机发送命令,设备响应后,数据会在DAT线上以块的形式,一块块发送到主机,每个块的后面都紧跟CRC的校检;需要停止读数据时,主机发送停止命令,设备响应后即可停止。
SD存储卡、SD I/O卡(包括仅IO卡和组合卡)和CE-ATA设备直接的数据传输是以数据块
的方式完成的。
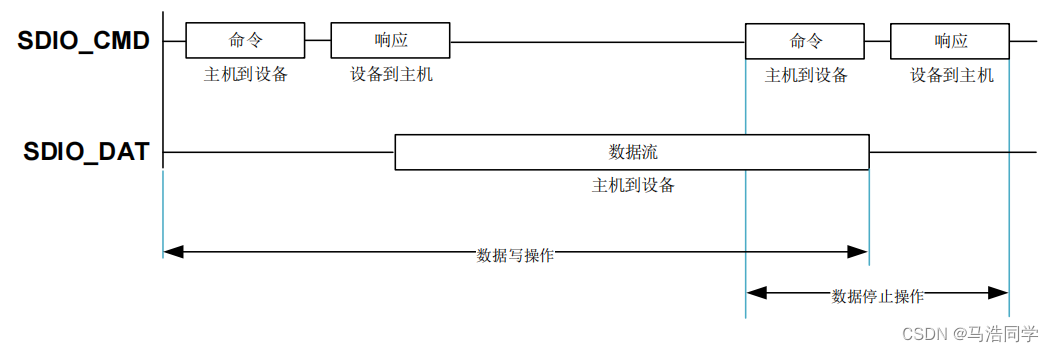
数据流读写操作
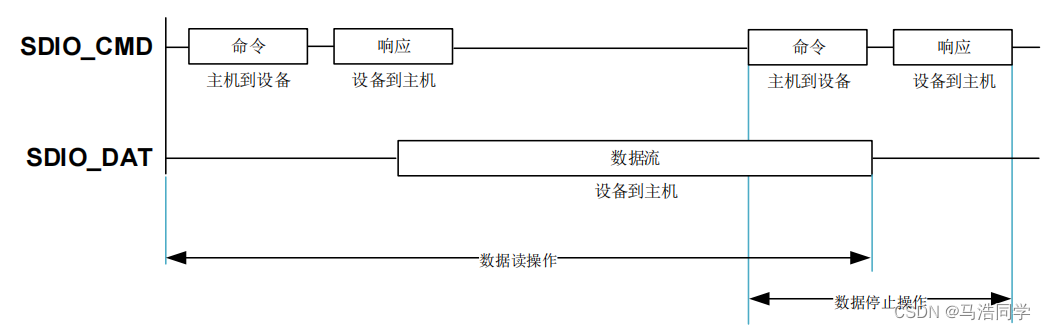
MMC卡以数据块或数据流方式进行数据传输。数据流读操作也是主机发送命令,设备响应后,设备通过DAT线发送数据,在该模式下数据是连续不断的,只到主机发送停止命令,设备响应后停止。
总线协议
命令
SDIO有4种控制卡的命令:
- 广播命令(bc),发送到所有卡,没有响应;
- 带响应的广播命令(bcr),发送到所有卡,同时从所有卡收到响应;
- 寻址(点对点)命令(ac),发送到寻址的卡上,DAT 信号线没有数据传输;
- 寻址(点对点)的数据传输的命令(adtc),发送到寻址的卡上,DAT 信号线进行数据传输。
所有命令都是48位的固定码长,定义如下图所示。

一个命令总是从一个起始位(始终为0)开始,随后的位表示传输的方向(主机=1)。接下来的6位表示命令的索引,该值被解释为一个二进制编码的数字(0到63之间)。一些命令需要一
个参数(例如,一个地址),由32位编码。上表中的表示为“x”的值表示这个变量依赖于该命
令。所有的命令有一个CRC 7位校验,由结束位(总是 1)终止。
响应
响应的类型有7种:
- R1/R1b: 普通命令响应
- R2: CID, CSD 寄存器
- R3: OCR 寄存器
- R4: Fast I/O
- R5: 中断请求
- R6: 发布的 RCA 响应
- R7: 卡接口条件
除了R2的响应长度是136位,其他响应长度均为48位。
R1/R1b (普通命令响应)

长度为48位,位[45:40]指示要响应的命令索引。
R2 (CID, CSD 寄存器)

长度为136位,CID寄存器的内容作为对命令CMD2和CMD10的响应被发送,CSD寄
存器的内容将作为以CMD9响应被发送。
R3 (OCR 寄存器)

长度为48位,OCR寄存器的内容作为SD存储卡或MMC的响应被发送。
R4 (Fast IO)
R4响应仅适用于MMC。长度为48位。参数域包括选定卡的RCA,被读取或写入寄存器的地址及其内容。

R4b(Fast IO)
R4b响应仅适用于SD I/O卡。长度为48位。SD I/O卡接收到CMD5命令后会返回一个唯一的 SD I/O卡响应R4。


R5 (中断请求)

R5响应仅适用于MMC。长度为48位。若这个响应由主机产生,参数中RCA域为0x0。
R5b(中断请求)

R5b响应仅适用于SD I/O卡。SD I/O卡对于CMD52和CMD53命令的响应是R5。
R6 (发布的RCA响应)

代码长度为48位。位[45:40]表示对CMD3响应的命令索引。参数字段的16个最高位比特用于已发布的RCA号。
R7 (卡接口条件)


仅适用于SD存储卡。代码长度为48位。位[19:16]表明该卡支持的电压范围。
SD卡操作模式
卡识别
卡识别过程如下:

上电后,主机进入卡识别模式,寻找总线上的新卡;而卡则处于空闲状态。在与卡进行通信前主机必须先知道卡的电压范围,对于SD卡,需调用ACMD41命令;对于MMC卡需调用CMD1命令;对于SD I/O卡,需调用CMD5命令。另外,对于支持SDIO V2.0的SD卡,在调用ACMD41命令前还需调用CMD8命令,让卡知道主机支持物理层2.00协议及高版本功能。
接着卡会进入准备状态,然后发送CMD2命令使卡进入识别状态;最后再发送CMD3,使卡进入待机状态。
数据操作模式
数据操作模式过程如下:

数据操作模式比较复杂,这里只介绍SD卡的流程。
对于写操作,主机先发CMD7,选中对应的卡,使其进入传输状态。接着发送CMD23(单块写命令)或CMD24(多块写命令)使卡进入数据接收状态,然后主机就可以开始传输数据。主机传输完指定的数据后必须发送CMD12命令终止数据传输,此时卡会进入编程状态。当卡完成数据的存储后,会自动返回传输状态。上面的过程中我们可以通过CMD13命令轮询检查卡的状态,判断编程状态是否已退出。
对于读操作,同样,主机先发CMD7命令,选中对应的卡,卡进入传输状态。接着发送CMD17(单块读操作)或CMD18(多块读操作)使卡进入数据发送状态,然后主机开始接收数据,数据传输完成卡会自动返回传输状态。
例程
例程中实现了SD卡的初始化、信息读取、单块读写操作、锁卡操作和多块读写操作。
int main(void)
{nvic_priority_group_set(NVIC_PRIGROUP_PRE1_SUB3);nvic_irq_enable(SDIO_IRQn, 0, 0);debug_init();printf("sdcard demo\r\n");// 初始化SD卡int i = 5;while ((SD_OK != sdcard_init()) && (i--));if (i == 0){printf("sdcard init failed\r\n");while (1);}// 打印卡信息sdcard_info_print();// 测试sdcard_read_write_test();sdcard_lock_test();sdcard_multi_read_write_test();while(1){}
}
兆易创新官方固件库很贴心地自带一个SDIO外设的驱动库,在sdio的例程里面;SD卡初始化的代码如下。
static sd_error_enum sdcard_init(void)
{sd_error_enum status = SD_OK;uint32_t cardstate = 0;// 初始化SD卡if ((status = sd_init()) != SD_OK){printf("sdcard init failed\r\n");return status;}// 获取SD卡信息if(SD_OK != (status = sd_card_information_get(&sd_cardinfo))){printf("get sdcard info failed\r\n");return status;}// 片选SD卡if(SD_OK != (status = sd_card_select_deselect(sd_cardinfo.card_rca))){printf("select card failed\r\n");return status;}// 获取SD卡状态if (SD_OK != (status = sd_cardstatus_get(&cardstate))){printf("get card status failed\r\n");return status;}else if(cardstate & 0x02000000){printf("the card is locked!\r\n");while(1);}// 设置4bit总线模式if(SD_OK != (status = sd_bus_mode_config(SDIO_BUSMODE_4BIT))){printf("set bus mode failed\r\n");return status;}// 设置DMA传输模式if(SD_OK != (status = sd_transfer_mode_config(SD_DMA_MODE))){printf("set dma mode failed\r\n");return status;}return status;
}
先调用sd_init函数初始化SDIO外设,驱动库内的代码如下。
sd_error_enum sd_init(void)
{sd_error_enum status = SD_OK;/* configure the RCU and GPIO, deinitialize the SDIO */rcu_config();gpio_config();sdio_deinit();/* configure the clock and work voltage */status = sd_power_on();if(SD_OK != status) {return status;}/* initialize the card and get CID and CSD of the card */status = sd_card_init();if(SD_OK != status) {return status;}/* configure the SDIO peripheral */sdio_clock_config(SDIO_SDIOCLKEDGE_RISING, SDIO_CLOCKBYPASS_DISABLE, SDIO_CLOCKPWRSAVE_DISABLE, SD_CLK_DIV_TRANS);sdio_bus_mode_set(SDIO_BUSMODE_1BIT);sdio_hardware_clock_disable();return status;
}
先使能外设时钟并配置管脚,所有使用到的管脚配置成复用推挽模式即可。
接着调用sd_power_on函数进行SD卡的配置;函数内部主要是先发送CMD0命令复位卡,然后发送CMD8命令判断卡版本,最后发送ACMD41命令获取卡电压值和容量支持信息。
然后调用sd_card_init函数初始化SD卡;函数内部主要是先发送CMD2获取卡的CID值,接着发送CMD3命令使卡发布新的RCA地址,最后发送CMD9命令获取卡的CSD值。
卡初始化完后,调用sd_card_select_deselect函数,传入卡的RCA地址来选中卡;因为卡在复位后默认是工作在1bit模式下,因此根据需要调用sd_bus_mode_config函数使卡工作在4bit模式;最后根据需要调用sd_transfer_mode_config函数,使用DMA传输卡数据。
例程第一项测试单块数据的读写,代码如下。
static void sdcard_read_write_test(void)
{sd_error_enum sd_error;for (uint32_t i = 0; i < 512; i++)buf_write[i] = i;memset(buf_read, 0, sizeof(buf_read));/* single block operation test */sd_error = sd_block_write(buf_write, 100 * 512, 512);if(SD_OK != sd_error){printf("\r\n Block write fail!");return;}else{printf("\r\n Block write success!");}sd_error = sd_block_read(buf_read, 100 * 512, 512);if(SD_OK != sd_error){printf("\r\n Block read fail!");return;}else{printf("\r\n Block read success!");}
}
单块写调用sd_block_write函数;函数内部先发送CMD16设置块大小,然后发送CMD24命令写入一个块的数据。
单块读调用sd_block_read函数;函数内部操作与单块写同理,唯一的不同是最后发送CMD17命令读取一个块的数据。
例程第二项测试卡的上锁和解锁,代码如下。
static void sdcard_lock_test(void)
{sd_error_enum sd_error;if(SD_CCC_LOCK_CARD & sd_cardinfo.card_csd.ccc){/* lock the card */sd_error = sd_lock_unlock(SD_LOCK);if(SD_OK != sd_error){printf("\r\n Lock failed!");return;}else{printf("\r\n The card is locked!");}sd_error = sd_erase(100 * 512, 101 * 512);if(SD_OK != sd_error)printf("\r\n Erase failed!");elseprintf("\r\n Erase success!");/* unlock the card */sd_error = sd_lock_unlock(SD_UNLOCK);if(SD_OK != sd_error){printf("\r\n Unlock failed!");return;}else{printf("\r\n The card is unlocked!");}sd_error = sd_erase(100 * 512, 101 * 512);if(SD_OK != sd_error)printf("\r\n Erase failed!");elseprintf("\r\n Erase success!");}
}
使用sd_lock_unlock函数可实现上锁和解锁;上锁和解锁都是通过发送CMD41命令实现,若我们想知道卡是否上锁可以随时发送CMD13命令来判断。
例程中在上锁和解锁后都调用了sd_erase函数擦除指定块,验证是否上锁或解锁成功,函数内部先发送CMD32和CMD33命令分别设置擦除的块起始地址和结束地址,最后发送CMD38命令执行擦除。
例程最后一项测试多块读写,代码如下。
static void sdcard_multi_read_write_test(void)
{sd_error_enum sd_error;for (uint32_t i = 0; i < 512; i++)buf_write[i] = i;memset(buf_read, 0, sizeof(buf_read));sd_error = sd_multiblocks_write(buf_write, 200 * 512, 512, 3);if(SD_OK != sd_error){printf("\r\n Multiple block write fail!");return;}else{printf("\r\n Multiple block write success!");}sd_error = sd_multiblocks_read(buf_read, 200 * 512, 512, 3);if(SD_OK != sd_error){printf("\r\n Multiple block read fail!");return;}else{printf("\r\n Multiple block read success!");}
}
多块写操作调用sd_multiblocks_write函数,内部主要是先发送CMD16命令设置块大小,然后发送ACMD23命令预擦除要写入的区域,最后发送CMD25命令写入所有的数据。
多块读操作调用sd_multiblocks_read函数,流程和多块写类似,也是先发送CMD16命令设置块大小,然后发送CMD18命令读取指定数量的块数据。
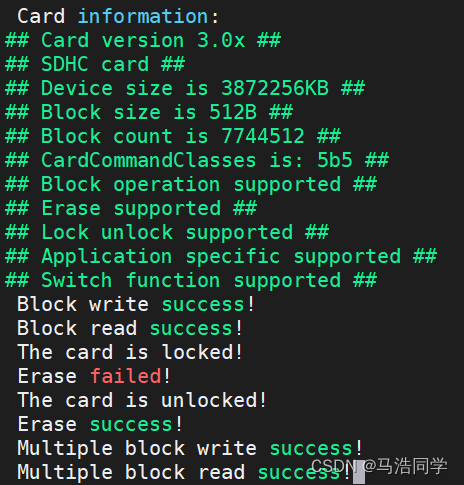
例程的完整打印如下。