本文在前期TDM和BPM体制的基础上,仿真DDM体制下的调制解调和信号处理测距、测速、测角流程。
TDM和BPM相关可以看这两篇博文TDM(BPM)-MIMO-FMCW雷达仿真-CSDN博客,确定性最大似然(DML)估计测角-CSDN博客TDM(BPM)-MIMO-FMCW雷达仿真-CSDN博客,。
一、DDM原理
DDM体制下所有发射天线同时发射,但是每个发射天线的信号都偏移一个特定的频率,通过这个人为偏移的频率使不同发射天线的信号在 Doppler 域上能分离开来。使用DDM 波形,一个目标在不同发射天线的信号辐射下所形成的回波中检测到的速度值是不同的,利用这种速度的不同,对一个目标我们可以把不同发射天线的信号在接收端分离出来。
需要注意的是,不同发射天线上的频率偏移是通过在chirp之间(也就是慢时间上)施加不同的相位旋转而实现的,而在chirp内(也就是快时间上)信号的相位是不变的。
如下图所示,假设总共有Nt根发射天线,那么对于发射天线k,在相邻chirp上施加的相移![]() 由下面的公式决定
由下面的公式决定
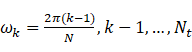 (1)
(1)
一般来说,公式(1)中的N由下式决定:
![]() (2)
(2)
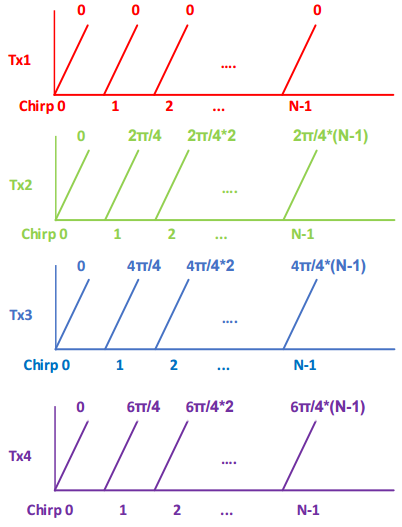
一个4发的DDM雷达系统的发射相位设置如上图所示,和TDM相比,DDM下Nt根发射天线同时发射,相比TDM能获得的分集发射增益为![]() :
:
![]() (3)
(3)
根据公式(3),4根发射天线下DDM相比TDM能够获取大约6dB的分集发射增益,这对于提高雷达的探测距离是非常有益的。DDMA波形的缺点是由于人为地在每个发射通道上附加了频偏,导致雷达地最大不模糊速度区间(也即最大不模糊Doppler域)变小了。
FMCW雷达的最大不模糊速度为:
 (4)
(4)
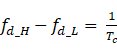
雷达的探测速度范围是![]() ,其中
,其中![]() 是chirp周期。上式指出雷达的最大不模糊速度
是chirp周期。上式指出雷达的最大不模糊速度![]() 是由chirp周期
是由chirp周期![]() 决定的,而Doppler公式指出目标的Doppler频率和速度间存在下面的关系:
决定的,而Doppler公式指出目标的Doppler频率和速度间存在下面的关系:
 (5)
(5)
结合公式(4)、(5)我们可以得到雷达的最大不模糊速度区间![]() 所对应的Doppler频率区间
所对应的Doppler频率区间![]() 为
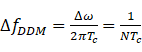
为 ,整个不模糊Doppler域的长度为:
,整个不模糊Doppler域的长度为:
 (6)
(6)
DDM体制下,在同一根发射天线的不同chirp之间,除了累积有目标速度带来的Doppler频移外,还会累积人为施加的DDM频偏。从公式(1),相邻两根发射天线的chirp间相移差![]() 为:
为:
 (7)
(7)
那么同一个目标,在相邻两根发射信号所产生的回波中Doppler频率差![]() 为:
为:
 (8)
(8)
将公式(8)代入(4),(5),同一个目标,在相邻两个发射天线信号所产生的回波中检测出的速度值相差:
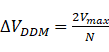 (9)
(9)
为了不混淆不同发射天线的数据,目标的最大速度不能超过![]() ,也就是说雷达的最大不模糊速度区间(或最大不模糊Doppler域)变为了原来的1/N。
,也就是说雷达的最大不模糊速度区间(或最大不模糊Doppler域)变为了原来的1/N。
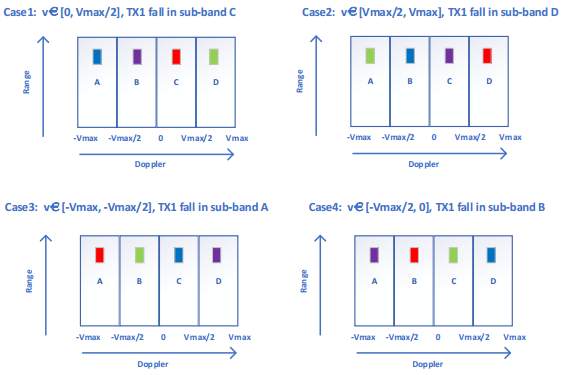
如下图所示,以4个发射天线为例,在没有DDM的情况下雷达的不模糊速度区间是![]() ,采用了DDM后,等效于将这个区间分为了长度相等的A、B、C、D这4个子区间。对同一个目标,4根发射天线的回波信号将分别落入这4个子区间,且相邻两根发射天线对应的回波信号速度值相差
,采用了DDM后,等效于将这个区间分为了长度相等的A、B、C、D这4个子区间。对同一个目标,4根发射天线的回波信号将分别落入这4个子区间,且相邻两根发射天线对应的回波信号速度值相差![]() 。
。![]() 的情况下,Tx1/2/3/4的回波信号将分别落入子区间C/D/A/B,此时不会产生速度模糊,我们可以按照C/D/A/B顺序依次分离出Tx1/2/3/4的数据,这就是DDM解调。但如果v超出了这个范围(下图中的case2,3,4情况),Tx1/2/3/4和子区间C/D/A/B的对应关系就会发生改变,此时用户就无法再仅仅根据子区间的位置去分离不同的发射天线数据,这便是DDM速度模糊。
的情况下,Tx1/2/3/4的回波信号将分别落入子区间C/D/A/B,此时不会产生速度模糊,我们可以按照C/D/A/B顺序依次分离出Tx1/2/3/4的数据,这就是DDM解调。但如果v超出了这个范围(下图中的case2,3,4情况),Tx1/2/3/4和子区间C/D/A/B的对应关系就会发生改变,此时用户就无法再仅仅根据子区间的位置去分离不同的发射天线数据,这便是DDM速度模糊。
二、DDM波形仿真
按照上述DDM原理,设计4个发射天线和4个接收天线,仿真的结果如下。
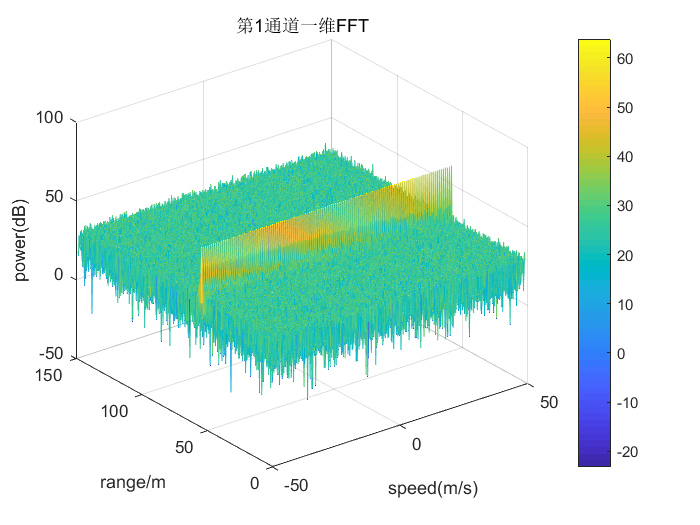
1. 一维FFT
单个目标第1个接收通道的一维FFT结果如下,可以看到距离上存在一个峰值,对应于真实的目标距离。
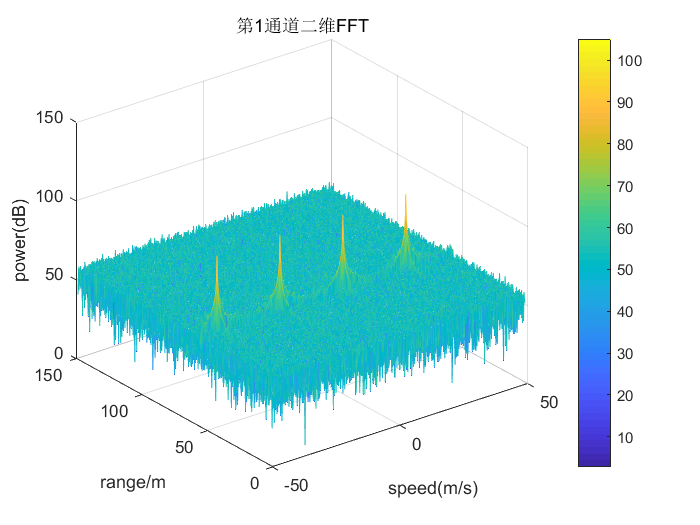
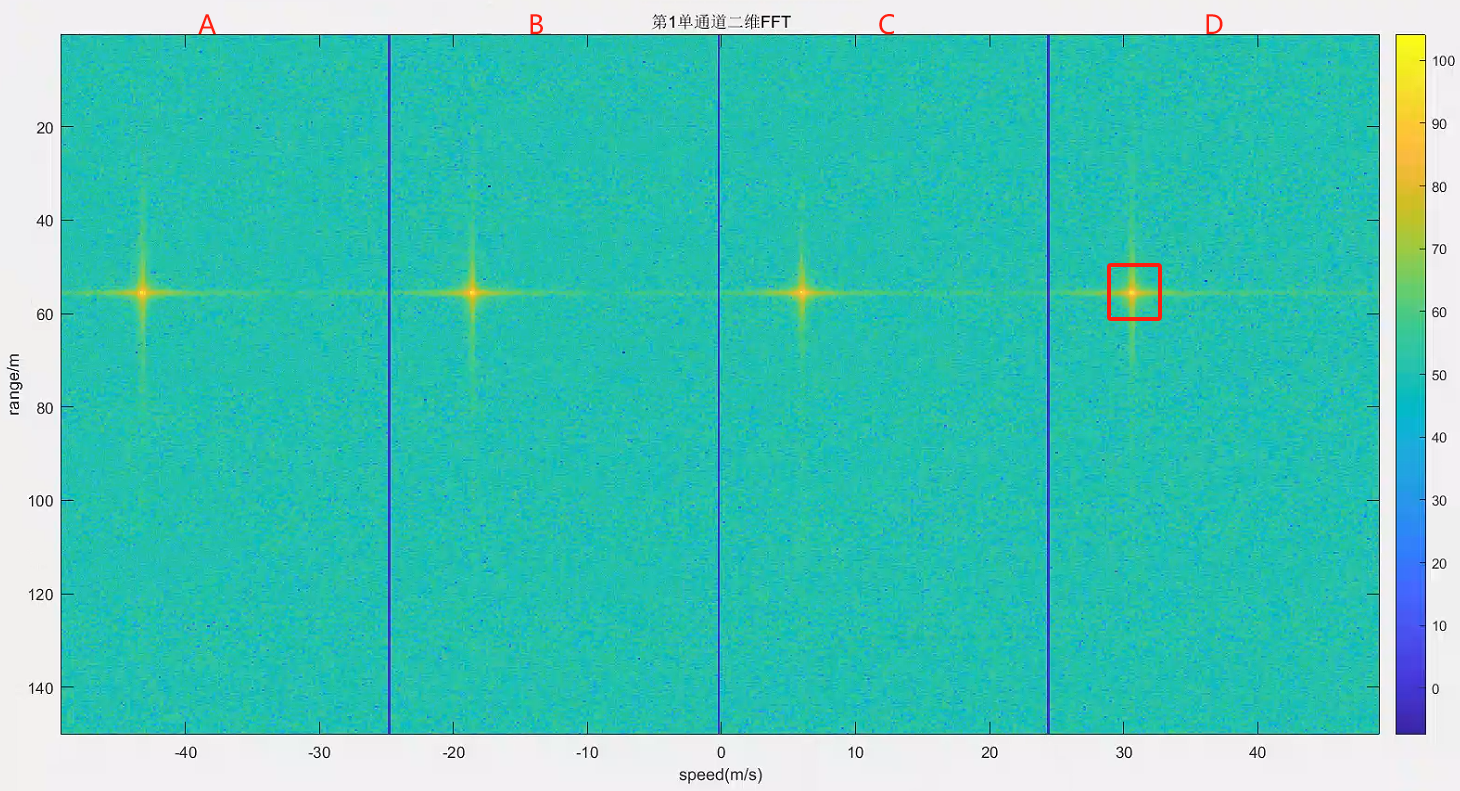
2.二维FFT和速度模糊
再做二维FFT,可以看到一个目标但出现了4个峰值,速度出现了模糊。
当目标实际速度为6m/s,Tx1/2/3/4对应为C/D/A/B。
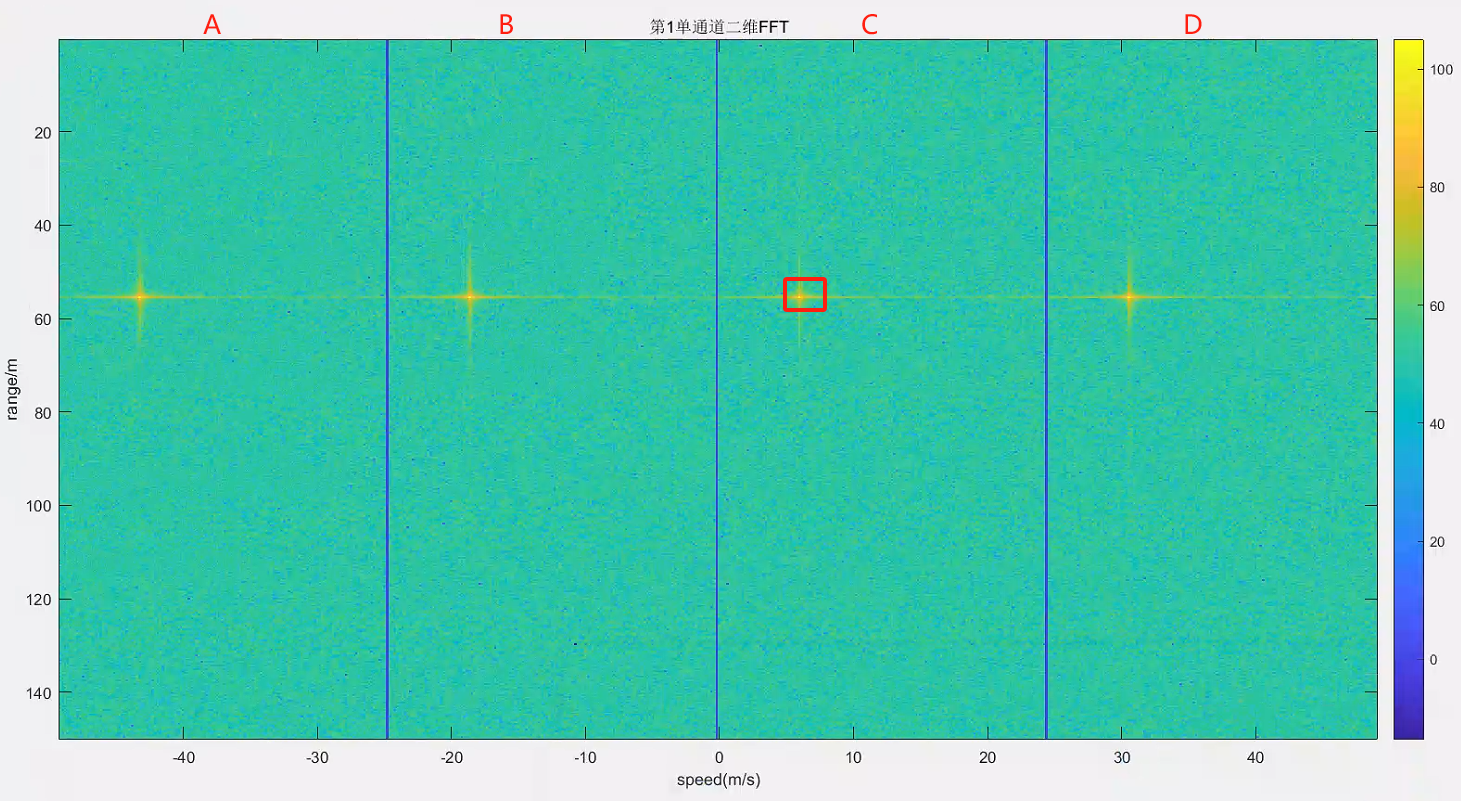
当目标实际速度为6m/s+Vmax/2,Tx1/2/3/4对应为D/A/B/C,但仅从二维FFT频谱图上无法确定目标实际速度,需要通过速度解模糊确定各个发射通道。
另外,当目标实际速度为6m/s+2Vmax,Tx1/2/3/4对应也为C/D/A/B,但此时DDM解模糊也无法获得目标真实速度,需要后续数据处理解决。
三、MATLAB代码
这里分享上述仿真的MATLAB代码,仅供参考。
% DDM体制FMCW雷达目标回波、FFT、FFT_1D、FFT_2D仿真
clc;clear;close all;
% 雷达参数设置
radar_parameter = signal_para_set();
c = radar_parameter.c;
k = radar_parameter.K;
Tp = radar_parameter.Tp;
fs = radar_parameter.fs;
lambda = radar_parameter.lambda;
sample_num = radar_parameter.sample_num; % 单chirp采样点数
slow_num = radar_parameter.slow_num; % chirp数量
R_res = c/2/radar_parameter.real_B; % 距离分辨率
R_Max = R_res*sample_num; % 最远距离
V_Max = radar_parameter.lambda/4/Tp; % 最大不模糊速度
V_res = V_Max*2/slow_num; % 速度分辨率
% 这里仅考虑均匀排布天线阵列
Tx_num = 4; % 发射天线数
EmptyBand_num = 0; % 空带数量
Total_num = Tx_num + EmptyBand_num; % 总的发射数量为实际发射天线加上空带
Rx_num = 4; % 接收天线数
dRx = lambda/2;
Rx_data = zeros(Rx_num,sample_num,slow_num);
% 发射天线相位编码,理论上可用于任意根天线
ddm_phase_value_1 = kron(ones(sample_num,1),exp(1i*zeros(1,slow_num))); % 扩展以便和矩阵相乘
ddm_phase_value_2 = kron(ones(sample_num,1),exp(1i*2*pi*(0:slow_num-1)/Total_num));
ddm_phase_value_3 = kron(ones(sample_num,1),exp(1i*4*pi*(0:slow_num-1)/Total_num));
ddm_phase_value_4 = kron(ones(sample_num,1),exp(1i*6*pi*(0:slow_num-1)/Total_num));
% 目标参数
tar_inf = [55 6 0]; % 仿真目标距离,速度,角度
% tar_inf = [15 1 10;
% 18 -5 0;
% 70.8 20 0;
% 90.3 -15 20;
% 105 10 -30;]; % 仿真目标距离,速度,角度
% 接收通道数据
for Rx_id = 1:Rx_num% 每根发射天线的数据ADC_data = zeros(sample_num,slow_num);Tx_data_1 = ADC_data;Tx_data_2 = ADC_data;Tx_data_3 = ADC_data;Tx_data_4 = ADC_data;for Tx_id = 1:Tx_numtemp_data = zeros(sample_num,slow_num);% 叠加所有目标for temp_tar = 1:size(tar_inf,1)% slow_time = (Tx_id - 1 + Tx_num*(0:slow_num-1))*Tp; % TDM模式下时序slow_time = (0:slow_num-1)*Tp; % 这里和TDM不同tar_pos = tar_inf(temp_tar,1) + tar_inf(temp_tar,2)*slow_time; % 生成波形,距离R=R0+v*dtfc_array = radar_parameter.fc*ones(sample_num,1);fast_time = ((0:sample_num-1)/fs)';delay = 2*tar_pos/c;phi = ((Tx_id-1)*Rx_num+Rx_id)*dRx/lambda * sind(tar_inf(temp_tar,3)); % 收发天线相位差,仿真DOAtemp_data = temp_data + exp(1i*2*pi*(phi + k*fast_time*delay + fc_array*delay - 1/2*k*(delay).^2));end% 叠加慢时间相位编码switch Tx_idcase 1Tx_data_1 = temp_data .* ddm_phase_value_1;case 2Tx_data_2 = temp_data .* ddm_phase_value_2;case 3Tx_data_3 = temp_data .* ddm_phase_value_3;case 4Tx_data_4 = temp_data .* ddm_phase_value_4;otherwisedisp('default');endend
% ADC_data = Tx_data_3; % 单根天线发射用于测试ADC_data = Tx_data_1 + Tx_data_2 + Tx_data_3 + Tx_data_4; % 所有天线发射ADC_data = awgn(ADC_data,0); % 产生噪声,0dBRx_data(Rx_id,:,:) = ADC_data;
end
% 显示解调前的数据,包括时域和二维FFT数据
V_label = (-V_Max:V_res:(V_Max-V_res));
R_label = R_res*(1:sample_num);
[XX,YY] = meshgrid(V_label,R_label);
% 选取第1接收通道显示
Rx_id = 1;
temp_data = squeeze(Rx_data(Rx_id,:,:));
FFT_1D = fft(temp_data,sample_num,1);
FFT_2D = abs((fftshift(fft(FFT_1D,[],2),2)));
figure;mesh(XX,YY,db(abs(FFT_1D)));colorbar;title('第1通道一维FFT');xlabel('speed(m/s)');ylabel('range/m');zlabel('power(dB)');grid on;
figure;mesh(XX,YY,db(FFT_2D));colorbar;title('第1通道二维FFT');xlabel('speed(m/s)');ylabel('range/m');zlabel('power(dB)');grid on;
% figure;imagesc(V_label,R_label,db(FFT_2D));colorbar;title('第1单通道二维FFT');xlabel('speed(m/s)');ylabel('range/m');zlabel('power(dB)');
Image_fft = db(FFT_2D); % 将最大不模糊速度根据发射天线数划分
V_label_len = length(V_label); % 速度范围的chirp数,根据划分定位各通道分界线
for i = 1:Total_num-1Line = round(V_label_len/Total_num)*i;Image_fft(:,Line) = 0;
end
figure;imagesc(V_label,R_label,Image_fft);colorbar;title('第1单通道二维FFT');xlabel('speed(m/s)');ylabel('range/m');zlabel('power(dB)');波形配置参数文件如下。
% 设置雷达信号的参数,返回配置参数
function [radar_parameter] = signal_para_set()
sample_num = 384; % 单chirp采样点数
slow_num = 512; % chirp数量
c = 3e8; % 光速
fc = 76e9; % 起始频率
K = 30e12; % 调频斜率
Tp = 20e-6; % 单chirp时长
B = K*Tp; % 总调频带宽
fs = 30e6; % 中频采样频率
ts = 1/fs; % 采样时间间隔
Ts = ts*sample_num; % 采样时间,Ts应当小于Tp
real_B = Ts*K; % 实际带宽
lambda = c/(fc+real_B/2); % 中心频率计算波长
if Ts > 0.8*Tpprintf('para has problem!');
end
% 结构体参数设置
radar_parameter.c = c;
radar_parameter.Tp = Tp;
radar_parameter.fc = fc;
radar_parameter.K = K;
radar_parameter.fs = fs;
radar_parameter.ts = ts;
radar_parameter.lambda = lambda;
radar_parameter.sample_num = sample_num;
radar_parameter.slow_num = slow_num;
radar_parameter.real_B = real_B;
end参考资料
《基于AWR2944的汽车雷达DDMA波形的原理和实现》