随着智能化时代的进程,机器人也在向着高度智能化的方向发展,这对应的机器人操作系统也就相应而生了。机器人操作系统ROS (Robot Operating System)的诞生为机器人系统的开发与应用带来了很大方便,也聚集了全球大量的应用开发人员推动ROS的发展。随着ROS不断地应用,所显现的缺点也越来越多。为了弥补出现的缺点,需要对ROS进行改进,最初的创始人团队在2017正式发布了ROS2, 经过多年的技术沉淀,ROS2已经成熟。为后来的学习者也带来了稳定与便捷。
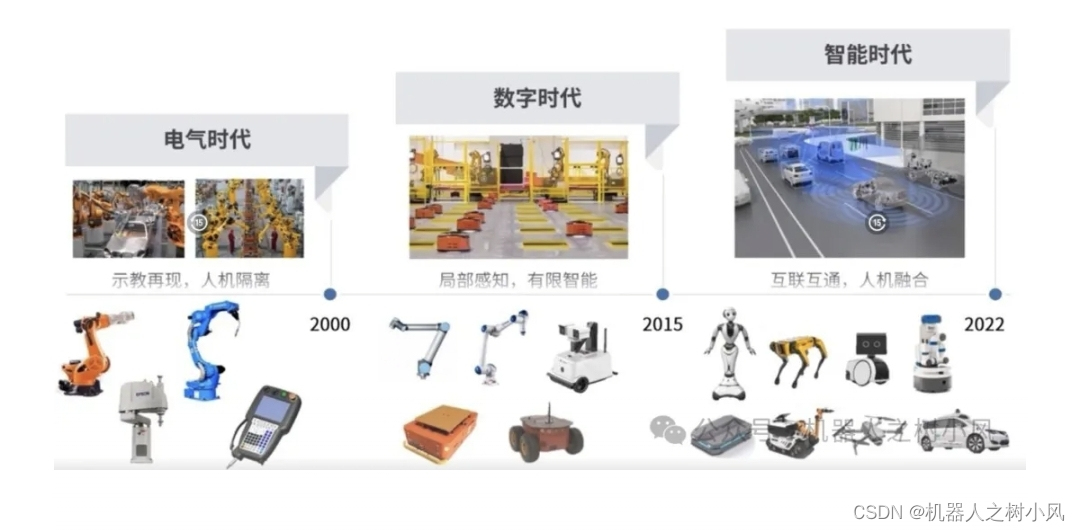
一、通过下图可以看出机器人发展的时代变化,当前已经处于智能化时代。ROS就是在数字时代诞生的。
温馨提示:在同名公众号上可以查看更多关于ROS2的内容,包括将系统语言更改为中文的方法等。