有一个无序整型数组,求该数组排序后的任意两个相邻元素的最大差值;要求时间复杂度和空间复杂度尽可能低。
(1)任意一种时间复杂度为O (nlogn)的排序算法(如快速排序)给原数组排序,然后遍历排好序的数组,并对每两个相邻元素求差,最终得到最大差值。 该解法的时间复杂度是O (nlogn),在不改变原数组的情况下,空间复杂度是O (n)。
(2)计数排序的思想,先找出原数组中最大值和最小值的差。但如果原数组只有3个元素:2,3,1000000,这样就要创建1000000个数组,不可行!
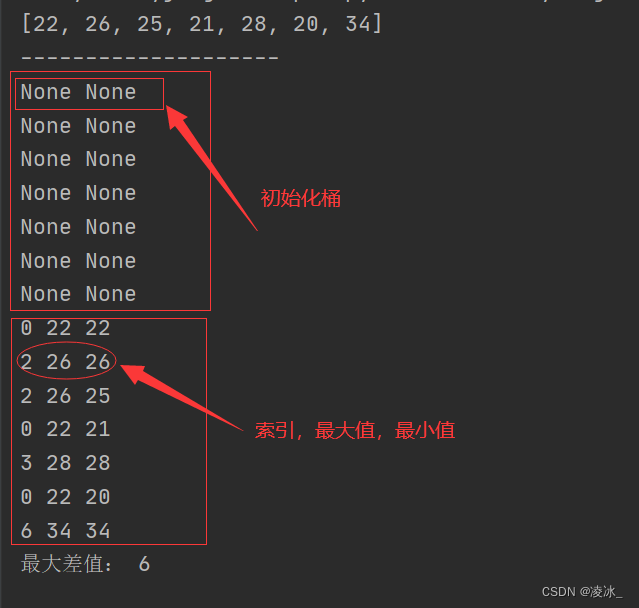
优化方法:使用桶排序的思想(不直接进行桶排序),可以做到时间复杂度O(N),空间复杂度O(N)。

class Bucket:def __init__(self):self.max=Noneself.min=Nonedef get_max_sub2(ll):#1.获取最大值和最小值max_v=max(ll)min_v=min(ll)d=max_v-min_v# print(max_v,min_v)#如果等于0,则返回0if d==0:return 0#2.初始化桶bucket_len=len(ll)buckets=[]for i in range(bucket_len):buckets.append(Bucket())print(buckets[i].max,buckets[i].min)#3.循环原数列,确定每个桶的最大值和最小值for i in range(len(ll)):#确定数组元素桶的下标index=int((ll[i]-min_v)*(bucket_len-1)/d)#判断最大值为空或桶的最大值小于原数列if buckets[index].max is None or buckets[index].max<ll[i]:buckets[index].max=ll[i]if buckets[index].min is None or buckets[index].min>ll[i]:buckets[index].min=ll[i]print(index,buckets[index].max,buckets[index].min)#4.循环桶,找最大差值#默认左边的第一个最大leftMax=buckets[0].max# 最大差dis_max=0#循环从第2个开始for i in range(1,len(buckets)):#如果最小值为空,继续循环if buckets[i].min is None:continue#如果最小值-第1个最大值大于最大差if buckets[i].min-leftMax>dis_max:dis_max=buckets[i].min-leftMax#获取到最大值leftMax=buckets[i].maxreturn dis_maxif __name__ == '__main__':ll=[22,26,25,21,28,20,34]print(ll)print('-'*20)print("最大差值:",get_max_sub2(ll))