前言
在裸机开发中,我们的程序往往都是写在while(1)的死循环里面,程序的执行顺序是依次从上到下执行的。假设我们while(1)死循环里面有A、B、C三个任务,如下图所示。三个任务依次执行,那么在执行的过程中就存在这么一种现象。下面举几个例子说明这个现象
- 如果此时A在执行任务,那么B和C就会堵塞,B必须等到A执行完才能执行,C更惨,得等到B执行完后才能执行;
- 如果此时B在执行任务,那么A和C就会堵塞,C必须等到B执行完才能执行,A风水轮流转,现在轮到它最惨了,它必须得等到C执行完后才能执行;
- 如果此时C在执行任务,这时候就轮到A等C执行完成,而轮到B最惨了。
那有没有办法,让A、B、C同时执行,或者我不想按照A、B、C这个顺序循环去执行,我想根据实际需求动态去调节这些任务的顺序呢?答案是有的。RTOS(Real Time Operating System)就可以很好的解决上述问题(对于多个任务同时执行问题实际上还是有先后的,只不过因为每个任务等待时间很短,看起来就像同时执行,这一点利用极限的思想就可以很好理解这个问题了)。
RTOS_14">1. FreeRTOS源码初探
RTOS系统有很多,我们这里用的是FreeRTOS。我们直奔主题,这里我们是要在STM32F103C8T6单片机中,将LED点灯程序改成FreeRTOS下发任务完成。我们将尽可能详细的展示具体的实现过程。
RTOS_16">1.1 获取FreeRTOS源代码
这里推荐FreeRTOS官方网站下载。FreeRTOS官方网站:https://www.freertos.org/
- 进入官网,点击Download FreeRTOS

- 点击Download(浏览器自动翻译成中文了)

这里我们下载最新的版本。如果不想下载最新版本,可以在 GitHub 下载早期版本。
RTOS_24">1.2 FreeRTOS系统源码内容
下载打开后,文件夹里面的内容如下图所示。文件夹中几个关键的文件具体描述为:
- FreeRTOS:FreeRTOS内核
- FreeRTOS-Plus:FreeRTOS组件
- tools:相关工具
- GitHub-FreeRTOS-Home:FreeRTOS的GitHub仓库链接
- Quick_Start_Guide:FreeRTOS快速入门官方指导手册
- Upgrading-to-FreeRTOS:升级到指定FreeRTOS版本官方文档链接
- History:FreeRTOS历史更新记录

一般来说FreeRTOS有2种移植方式,一种是直接在官方给出Demo中编写自己业务需求代码,一种是将FreeRTOS内核相关文件移植到自己已有的项目中。入门的话,建议采用第一种,这里我们用的是第二种。将FreeRTOS内核相关文件移植到我们的项目中。
RTOS_38">1.3 FreeRTOS文件夹内容
不管采用上面哪一种方法,和我们切相关的是FreeRTOS内核,也即FreeRTOS系统内核文件夹里的内容。以Keil工具下STM32F103芯片为例,它的FreeRTOS的目录如下:

RTOS_45">2 FreeRTOS移植
2.1 移植准备
-
准备一个工程模板(这里为自制的LED点亮模板)。
-
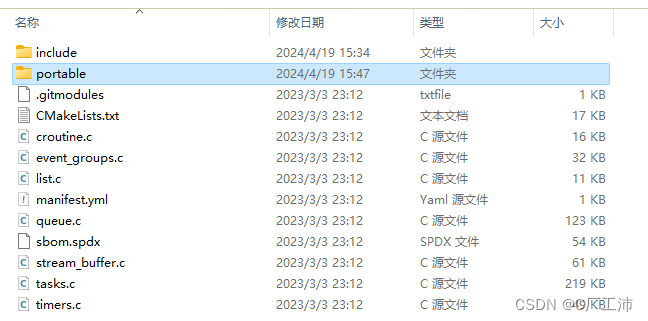
portable文件夹中只保留keil、MemMang和RVDS这三个文件夹,其他的都可以删除,其他用不到,为了简化,将不需要的删掉。
-
其实keil文件也可以删除,他们放的txt只是起引导作用,让我们去看RVDS文件夹。MemMang里面放的是内存管理文件。具体想知道各文件的功能,可以参考韦东山的书,其他被删除的文件也可以自行查询其用途。
-
由于我们的STM32103是M3内核,所以RVDS文件夹我们只保留要用的ARM_CM3文件夹即可,将其他删除。

-
去FreeRTOS—>Demo—>CORTEX_STM32F103_Keil中复制FreeRTOSConfig.h文件。

-
将其粘贴至工程文件所在的include文件夹中,顾名思义,FreeRTOSConfig.h文件是用来配置FreeRTOS系统的。

2.2开始移植
Step 1:打开基础工程,创建FreeRTOS_core和FreeRTOS_port文件。

Step 2:将FreeRTOS所有.c文件添加进FreeRTOS_core。将FreeRTOS—>portable—>RVDS—>ARM_CM3的中port.c文件添加进FreeRTOS_port;将FreeRTOS—>portable—>MemMang中的heap_4.c(管理内存的文件,每个文件的用法,可以去看相关文献)文件添加进FreeRTOS_port。添加完后如下图所示。

Step 3:添加对应的头文件路径,这里用到两个,如下图所示。

Step 4:修改FreeRTOSConfig.h文件,在其中添加以下几行
#define vPortSVCHandler SVC_Handler
#define xPortPendSVHandler PendSV_Handler
#define xPortSysTickHandler SysTick_Handler

这么做的目的是更改底层映射函数(此步也可以通过其他方式完成,但此方法较为简单)。其中vPortSVCHandler,xPortPendSVHandler和xPortSysTickHandler是在port.c文件里面定义的。SVC_Handler,PendSV_Handler和SysTick_Handler在startup_stm32f10x_md.s文件里面进行了定义。这里我们需在stm32f10x_it.c中将这三个函数注释掉。如

否则程序会卡死在下图所示的位置,大家可以自行实验一下。

Step 5:添加需要用到的头文件
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
Step 6:添加时钟代码,没有配置时钟,系统将无法运行
static void prvSetupHardware( void )
{/* Start with the clocks in their expected state. */RCC_DeInit();/* Enable HSE (high speed external clock). */RCC_HSEConfig( RCC_HSE_ON );/* Wait till HSE is ready. */while( RCC_GetFlagStatus( RCC_FLAG_HSERDY ) == RESET ){}/* 2 wait states required on the flash. */*( ( unsigned long * ) 0x40022000 ) = 0x02;/* HCLK = SYSCLK */RCC_HCLKConfig( RCC_SYSCLK_Div1 );/* PCLK2 = HCLK */RCC_PCLK2Config( RCC_HCLK_Div1 );/* PCLK1 = HCLK/2 */RCC_PCLK1Config( RCC_HCLK_Div2 );/* PLLCLK = 8MHz * 9 = 72 MHz. */RCC_PLLConfig( RCC_PLLSource_HSE_Div1, RCC_PLLMul_9 );/* Enable PLL. */RCC_PLLCmd( ENABLE );/* Wait till PLL is ready. */while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET){}/* Select PLL as system clock source. */RCC_SYSCLKConfig( RCC_SYSCLKSource_PLLCLK );/* Wait till PLL is used as system clock source. */while( RCC_GetSYSCLKSource() != 0x08 ){}/* Enable GPIOA, GPIOB, GPIOC, GPIOD, GPIOE and AFIO clocks */RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC| RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE );/* SPI2 Periph clock enable */RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );/* Set the Vector Table base address at 0x08000000 */NVIC_SetVectorTable( NVIC_VectTab_FLASH, 0x0 );NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );/* Configure HCLK clock as SysTick clock source. */SysTick_CLKSourceConfig( SysTick_CLKSource_HCLK );}
Step 7:编译0错误0警告,移植成功!!!

2.3 实验验证
LED灯接在PA0口。成功点亮了,真亮啊!!!

好了简单的移植就这么结束了。下面是我的main.c文件。
/** * FreeRTOS移植模板—LED灯点亮* 作者:陈小沛* 学院:自动化学院* 地点:广东工业大学* 时间:2024年04月19日* 个人博客:https://blog.csdn.net/weixin_47577143?spm=1011.2415.3001.5343**///单片机头文件
#include "stm32f10x.h" // Device header//硬件驱动
#include "Delay.h"#include "LED.h"//C库
#include <string.h>
#include <stdio.h>/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"/** Configure the clocks, GPIO and other peripherals as required by the demo.*/
static void prvSetupHardware( void );/** Configures the timers and interrupts for the fast interrupt test as* described at the top of this file.*/
extern void vSetupTimerTest( void );//任务1:LED灯点亮
void LED_Task1Function(void * param)
{while (1){LED1_ON();}
}int main(void)
{/*------------------------------------------------模块初始化-------------------------------------------------------------------------*/prvSetupHardware();LED_Init(); //客厅灯(LED初始化)/*-----------------------------------------------------------*//*任务创建** xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle )** vTaskCode:任务函数 "NAME:任务名称 STACK_SIZE:任务堆栈大小 NULL:传递给任务函数的参数 tskIDLE_PRIORITY:任务优先级 StartTask_Handler:任务句柄 */xTaskCreate(LED_Task1Function, "Task1", 1000, NULL, 0, NULL);/*-----------------------------------------------------------*//*开启任务调度*启动RTOS,其实就是启动“任务管理器”,启动之后任务管理器就开始调度线程*此时pc(程序计数器)就指向某线程的指令,开始多线程并发运行*如果没创建多线程的话,那就只有一个线程*/vTaskStartScheduler(); /*-----------------------------------------------------------*//*由于调用了vTaskStartScheduler之后,PC就指向了线程中的指令,因此vTaskStartScheduler后面代码*并不会被CPU执行,所以vTaskStartScheduler后的代码没有意义*/ while (1);}/*-----------------------------------------------------------*/static void prvSetupHardware( void )
{/* Start with the clocks in their expected state. */RCC_DeInit();/* Enable HSE (high speed external clock). */RCC_HSEConfig( RCC_HSE_ON );/* Wait till HSE is ready. */while( RCC_GetFlagStatus( RCC_FLAG_HSERDY ) == RESET ){}/* 2 wait states required on the flash. */*( ( unsigned long * ) 0x40022000 ) = 0x02;/* HCLK = SYSCLK */RCC_HCLKConfig( RCC_SYSCLK_Div1 );/* PCLK2 = HCLK */RCC_PCLK2Config( RCC_HCLK_Div1 );/* PCLK1 = HCLK/2 */RCC_PCLK1Config( RCC_HCLK_Div2 );/* PLLCLK = 8MHz * 9 = 72 MHz. */RCC_PLLConfig( RCC_PLLSource_HSE_Div1, RCC_PLLMul_9 );/* Enable PLL. */RCC_PLLCmd( ENABLE );/* Wait till PLL is ready. */while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET){}/* Select PLL as system clock source. */RCC_SYSCLKConfig( RCC_SYSCLKSource_PLLCLK );/* Wait till PLL is used as system clock source. */while( RCC_GetSYSCLKSource() != 0x08 ){}/* Enable GPIOA, GPIOB, GPIOC, GPIOD, GPIOE and AFIO clocks */RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC| RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE );/* SPI2 Periph clock enable */RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );/* Set the Vector Table base address at 0x08000000 */NVIC_SetVectorTable( NVIC_VectTab_FLASH, 0x0 );NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );/* Configure HCLK clock as SysTick clock source. */SysTick_CLKSourceConfig( SysTick_CLKSource_HCLK );}3. 参考资料
[1] 韦东山. FreeRTOS完全开发手册之上册—快速入门
4. 总结
以上即是本次的内容。我也是第一次使用RTOS,如有错误的,欢迎大家讨论交流。完整的代码我已经打包上传到我的博客,欢迎大家使用其作为自己的模板。当然最好是能自己建一个自己的模板,起码对移植中的bug有点了解,有利于更好理解RTOS。