聚类(Cluster)是数据处理中常用的一种分析方法,聚类的目标是将相似的数据对象划分到同一个簇中,使得同一簇内的数据对象的相似性尽可能大,而不同簇中的数据对象的差异性也尽可能大。
这里主要是介绍两种比较经典的聚类算法:k-means和高斯混合模型(Gaussian Mixture Model, GMM)。此外,考虑到上述两种算法都可以看做 Expectation Maximization(EM)算法的具体应用,因此这里也对EM算法做一下简单了解。
1. EM算法
Expectation Maximization(EM)算法算法是一种迭代优化算法,主要用于估计含有隐变量(latent variables)的概率模型参数。网上有很多写的比较好的介绍和推导文章,这里就不再赘述了,感兴趣的可以搜素了解下,这里仅留下自己在学习过程中参考的两篇资料:
- 人人都懂EM算法
- 期望最大化(EM)算法:从理论到实战全解析
简单来讲:EM算法可以用来处理一些含隐变量的模型的参数估计问题,比如k-means中,我们希望得到 k 个聚类数据,如果我们已经知道了样本集X中每个点的归属信息,那么很容易对 k 个聚类利用极大似然估计(MLE)方法估计出 k 个聚类的信息;但是现在问题时我们不知道样本集中的每个点的归属问题,那么E-M方法就提供了这样的一个求解方法:期望(E)步骤和最大化(M)步骤。假设给定了初始的 k 个聚类中心,E-step 就是 基于给定的k个聚类信息和样本点信息,计算样本点归属于各个聚类中心的条件概率。M-step 就是基于更新后的点的归属信息,计算新的 k 个聚类的信息。重复迭代E-step和M-step至收敛。
EM-算法流程:

2. K-mean算法
给定 N 个数据,要求将其划分为 k 个类别。
2.1 基本原理:
- 初始化:随机给定 k 个初始中心点,即 k 个类别;
- 分别计算 n 个数据点 x 到 k 个中心点的距离,并将数据点分配给离其最近的中心点,即把 n 个数据点 x 分配到 k 个类别上。
- 取平均,更新 k 个类别的中心点的位置。
数学定义:
- 给定样本集 { x 1 , x 2 , . . . , x n } \{x_1,x_2,...,x_n \} {x1,x2,...,xn}, x n ∈ R D x_n \in \mathbb{R}^D xn∈RD
- 聚类中心 μ k , k = 1 , 2... , K \mu_k,k=1,2...,K μk,k=1,2...,K, μ k \mu_k μk表示第 k 个聚类的中心
- 二分变量 r n k ∈ { 0 , 1 } r_{nk} \in \{ 0,1 \} rnk∈{0,1}, r n k r_{nk} rnk表示 当 x n x_n xn属于第 k i k_i ki个类别时, r n k = 1 r_{nk}=1 rnk=1,否则为 0
- 利用损失函数优化目标
J = ∑ n = 1 N ∑ k = 1 K r n k ∥ x n − μ k ∥ 2 J=\sum_{n=1}^N \sum_{k=1}^K r_{nk} \left\| x_n - \mu_k \right\|^2 J=n=1∑Nk=1∑Krnk∥xn−μk∥2
- 重复迭代2-3、4步骤
求解函数
- E-step: 固定 μ k \mu_k μk,求解 r n k r_{nk} rnk

将 x n x_n xn 分配到离其最近的 μ k \mu_k μk类别;
-
M-step: 固定 r n k r_{nk} rnk,求解 μ k \mu_k μk
对损失函数 J 求一阶导并令其等于0,即
2 ∑ n = 1 N r n k ( x n − μ k ) = 0 , μ k = ∑ n r n k x n ∑ n r n k 2 \sum_{n=1}^N r_{nk} (x_n - \mu_k) = 0, \space\ \mu_k = \frac{\sum_{n} r_{nk}x_n}{\sum_{n} r_{nk}} 2n=1∑Nrnk(xn−μk)=0, μk=∑nrnk∑nrnkxn -
迭代执行E-step、M-step,直到算法收敛。(判断是否收敛:① μ k \mu_k μk位置不再变动,或者变化量很小;② r n k r_{nk} rnk不再变化;)

工程应用中的一些技巧
- μ k \mu_k μk初始化时应选取样本集中点;
- 随机初始化多次k-means,选择损失函数 J 最小的作为最终结果;
- 在E-step中选择 KD-Tree 或 Octree 进行近邻搜索加速;
- Mini-batch K-Means; 每次迭代选择不同的数据子集进行 E&M;
局限性
- k 值未知,需要人为给定;
- 受噪声影响大;
2.2 K-mediods K-中心点算法
由于标准的 K-means 是对每个类别中的所有数据点取均值,因此计算时容易受到 噪声点的影响。
K-mediods法的中心思想:
- E-step 与 K-means方法相同;
- 而 M-step 中不是直接对所有数据取均值。对于每个聚类,需要遍历当前类别中的所有数据点,计算 x n x_n xn到其他数据点的距离 S,选取 S 最小的点作为新的 μ k \mu_k μk,从而剔除噪声点的影响;
损失函数 J:
J = ∑ n = 1 N ∑ k = 1 K r n k ν ( X n , μ k ) J=\sum_{n=1}^N \sum_{k=1}^K r_{nk} \nu(X_n,\mu_k) J=n=1∑Nk=1∑Krnkν(Xn,μk)
其中: ν ( X n , μ k ) \nu(X_n,\mu_k) ν(Xn,μk)不可导不可取平均。
2.3 K-means算法的应用
- 图像压缩
一般图像所占位数为 H x W x 3 (高x宽x通道数),假设图像有 N 个pixels,每个 pixel 包含 3 个通道信息(RGB),每一位都用0-255之间的数据表示的话,那么所占的存储空间为 24N bits 。如果人为选取 k =2, 3, 10,… (k << N) 中颜色对图像进行表示,会发现将颜色相近的像素用同一种颜色表达时,肉眼对图像内容的差异可能并不敏感,进而通过这种方式表达图像,可以实现图像的数据压缩。
2.4 代码练习
这里仅记录k-means算法实现的主流程部分:
- 定义存储聚类所需的结构体
// 定义存储聚类的结构体
typedef struct Cluster{// id, 存储索引, 中心点,unsigned int id;Eigen::VectorXd center;std::vector<int> data_index;int data_index_size; double delta;Cluster(unsigned int id_):id(id_) {delta = std::numeric_limits<double>::max();data_index_size = 0;}
}Cluster;
- 聚类中心随机初始化
bool KMeans::init_cluster(int k){// 判断 data_sizesize_t data_size = _data.cols();if(data_size < k){std::cerr << "data_size < k: " << data_size << " : " << k << std::endl;return false;}// 使用当前时间生成随机数来初始化聚类中心srand(int(time(0)));// 为了防止生成的随机数重复,还需要考虑去重逻辑!!!std::set<int> idx_removed;for(int i = 0; i < k;){int idx = rand() % data_size;if(idx_removed.count(idx) != 0){continue;}Cluster cluster(i);cluster.center = _data.col(idx);cluster.data_index.resize(data_size); // 方便后续添加聚类数据cluster.data_index_size = 0;_clusters.emplace_back(cluster);idx_removed.insert(idx);++i;}print_clusters();return true;
}
- E-step:计算每个数据点最可能归属的类别
bool KMeans::E_step(){// 不需要聚类时的边界条件!!!if(_clusters.size() <= 0){std::cerr << "clusters size is zero" << std::endl;}// 清除聚类中已分配的数据for(int i = 0; i < _clusters.size(); ++i){_clusters[i].data_index.clear();_clusters[i].data_index_size = 0;}// 计算所有点到这 k 个中心的距离,并分类;for(int i = 0; i < _data.cols(); ++i){// 计算当前点到k个中心的距离,并将其分配给离得最近的中心const Eigen::VectorXd tmp_value = _data.col(i);double distance = std::numeric_limits<double>::max();int id = -1;for(int j = 0; j < _clusters.size(); ++j){Eigen::VectorXd vdiff = tmp_value - _clusters[j].center;double diff = vdiff.norm();if(diff < distance){distance = diff;id = j;}}// 无法分配时,输出点号及错误提示// 否则将其加入到聚类中if(id == -1){std::cerr << "No " << i <<" data can not fine cluster center" << std::endl;return false;}_clusters[id].data_index.emplace_back(i);_clusters[id].data_index_size += 1;}return true;
}
- M-step: 取平均,更新 k 个类别的中心点的位置
bool KMeans::M_step(){// 需要考虑聚类数量为 0 的情况!!!if(_clusters.size() <= 0){std::cerr << "clusters size is zero" << std::endl;return false;}// 更新聚类for(int i = 0; i < _clusters.size(); ++i){Eigen::VectorXd tmp_value(_clusters[i].center.rows());tmp_value.setZero();for(int j = 0; j < _clusters[i].data_index_size; ++j){tmp_value += _data.col(_clusters[i].data_index[j]);}tmp_value /= _clusters[i].data_index_size;// 更新聚类中心_clusters[i].delta = (tmp_value - _clusters[i].center).norm();_clusters[i].center = tmp_value;}return true;
}
- 迭代执行E-step、M-step,直到收敛。
bool KMeans::compute(int k, int max_step, double min_update_size){// 检查聚类是否初始化if(!init_cluster(k)){std::cerr << "clusters initial error! " << std::endl;return false;}// 迭代聚类int i = 0;for(i = 0; i < max_step; ++i){// 执行E-stepif(!E_step()){std::cerr << "E_step error! " << std::endl;return false; }// 执行M-stepif(!M_step()){std::cerr << "M_step error! " << std::endl;return false; }// 判断是否可以提前结束迭代double update_size = KMeans::get_update_size();if(update_size < min_update_size){std::cout << "stop E-M step, update_size: " << update_size << std::endl;break;}}// 如果达到max_step仍不收敛,输出提示信息if(i >= max_step){std::cout << "reach max_step: " << max_step << std::endl;}return true;
}
3. 高斯混合模型(Gaussian Mixture Model, GMM)
基本思想:使用高斯分布 N ( μ , σ ) N(\mu,\sigma) N(μ,σ)来表示每一个聚类的信息,所有聚类信息结合在一起可以看做是多个高斯分布的线性组合。
其中 π k \pi_k πk表示第 k 个高斯分布所占的权重, ∑ k = 1 K π k = 1 \sum_{k=1}^K \pi_k =1 ∑k=1Kπk=1。
3.2 基本原理
首先引入一个 K 维的二进制变量 z z z:
z k ∈ { 0 , 1 } , Σ k z k = 1 z_k \in \{ 0,1 \}, \space\space \Sigma_k z_k =1 zk∈{0,1}, Σkzk=1
高斯分布 N ( μ k , Σ k ) N(\mu_k,\Sigma_k) N(μk,Σk)的先验概率 p ( z k = 1 ) p(z_k = 1) p(zk=1),表示数据点 x 来自第 k 个分布的可能性有多大
p ( z k = 1 ) = π k p(z_k =1)=\pi_k p(zk=1)=πk
给定一个数据点 x,我们希望得到表示聚类“label probability”的条件概率 p ( z ∣ x ) p(z|x) p(z∣x),即 x 属于哪一个高斯分布:
p ( z ∣ x ) = p ( x ∣ z ) p ( z ) p ( x ) , p ( x ) = ∑ z p ( z ) ( x ∣ z ) p(z|x) = \frac{p(x|z)p(z)}{p(x)}, \space \space \space p(x) = \sum_{z}p(z)(x|z) p(z∣x)=p(x)p(x∣z)p(z), p(x)=z∑p(z)(x∣z)
从有向图的角度来看,联合分布 p ( x , z ) = p ( z ) p ( x ∣ z ) p(x,z) = p(z)p(x|z) p(x,z)=p(z)p(x∣z)
- p ( z k = 1 ) = π k , z = [ z 1 , ⋯ , z k , ⋯ , z K ] p(z_k=1)=\pi_k, z=[z_1,\cdots,z_k,\cdots,z_K] p(zk=1)=πk,z=[z1,⋯,zk,⋯,zK],且 0 ≤ π k ≤ 1 , ∑ k = 1 K π k = 1 0 \le \pi_k \le 1,\sum_{k=1}^{K}\pi_k =1 0≤πk≤1,∑k=1Kπk=1
- 进一步, p ( z ) = Π k = 1 K π k z k p(z) = \Pi_{k=1}^{K} \pi_k^{z_k} p(z)=Πk=1Kπkzk
- 那么 p ( x ∣ z k = 1 ) p(x|z_k=1) p(x∣zk=1)表示已知第 k 个高斯分布的情况下得到数据点 x 的概率:
p ( x ∣ z k = 1 ) = N ( x ∣ μ k , Σ k ) p(x|z_k=1) =\Nu(x | \mu_k, \Sigma_k) p(x∣zk=1)=N(x∣μk,Σk)
- 进一步, p ( x ∣ z ) p(x|z) p(x∣z)可以表示为
p ( x ∣ z ) = Π k = 1 k N ( x ∣ μ k , Σ k ) z k p(x|z)=\Pi_{k=1}^k \Nu(x | \mu_k,\Sigma_k)^{z_k} p(x∣z)=Πk=1kN(x∣μk,Σk)zk
那么 x 的边缘分布可以通过 p ( x ) = Σ z p ( x , z ) p(x)=\Sigma_{z} p(x,z) p(x)=Σzp(x,z)得到:
p ( x ) = ∑ z p ( z ) p ( x ∣ z ) = ∑ k = 1 K π k N ( x ∣ μ k , Σ k ) p(x)=\sum_{z} p(z)p(x|z) = \sum_{k=1}^{K}\pi_k \Nu(x |\mu_k, \Sigma_{k}) p(x)=z∑p(z)p(x∣z)=k=1∑KπkN(x∣μk,Σk)
推导过程
假设已知数据点 x n x_n xn,以及各个高斯分布模型 { π k , μ k , Σ k } \{ \pi_k,\mu_k,\Sigma_k \} {πk,μk,Σk},求该数据点属于第 k 个高斯分布的概率:
p ( z ∣ x ) = p ( x , z ) p ( x ) = p ( x ∣ z ) p ( z ) p ( x ) p(z|x) = \frac{p(x,z)}{p(x)}= \frac{p(x|z)p(z)}{p(x)} p(z∣x)=p(x)p(x,z)=p(x)p(x∣z)p(z)
定义 p ( z k = 1 ∣ x ) p(z_k=1|x) p(zk=1∣x)为 γ ( z k ) \gamma(z_k) γ(zk),则:

求解过程
上一部分是基于高斯模型 { π k , μ k , Σ k } \{ \pi_k,\mu_k,\Sigma_k \} {πk,μk,Σk}给定的情况,但在实际处理中,一般只知道样本数据 x n x_n xn,需要计算各个高斯模型的参数。也就是要用到极大似然估计(Maximum likelihood),即在给定样本数据点 X 后,如何得到最大可能性的高斯分布模型参数 { π k , μ k , Σ k } \{ \pi_k,\mu_k,\Sigma_k \} {πk,μk,Σk}。
p ( x ) = ∑ k = 1 K π k N ( x ∣ μ k , Σ k ) p(x)=\sum_{k=1}^{K} \pi_k \Nu(x|\mu_k,\Sigma_k) p(x)=k=1∑KπkN(x∣μk,Σk)
l n p ( X ∣ π , μ , Σ ) = ∑ n = 1 N l n { π k N ( x n ∣ μ k , Σ k ) } ln \space p(X|\pi,\mu,\Sigma)=\sum_{n=1}^{N}ln \{\pi_k \Nu(x_n|\mu_k,\Sigma_k) \} ln p(X∣π,μ,Σ)=n=1∑Nln{πkN(xn∣μk,Σk)}
- 奇点问题
假设高斯分布的协方差矩阵 Σ k = σ k 2 I \Sigma_k=\sigma_k^2 I Σk=σk2I,即每个方向上的方差一致;同时假设有一个数据点 x n = μ j x_n = \mu_j xn=μj(某个高斯分布的中心),
N ( x n ∣ x n , σ j 2 I ) = 1 ( 2 π ) 1 / 2 1 σ j \Nu(x_n|x_n,\sigma_j^2I)= \frac{1}{(2\pi)^{1/2}} \frac{1}{\sigma_j} N(xn∣xn,σj2I)=(2π)1/21σj1
此时如果 σ j \sigma_j σj很小,会导致整体趋于无穷大,此时会出现很大的似然估计。
解决方法:当出现 Σ k \Sigma_k Σk很小的情况时,随机初始化成另一个值。
- 求解 MLE
GMM的最大似然优化项为:
①固定 π \pi π和 Σ \Sigma Σ,求解 μ k \mu_k μk:(用到了链式求导法则和对数求导)
② 固定 π \pi π和 μ \mu μ,求解 Σ k \Sigma_k Σk:
③ 固定 μ \mu μ和 Σ \Sigma Σ,求解 π k \pi_k πk:
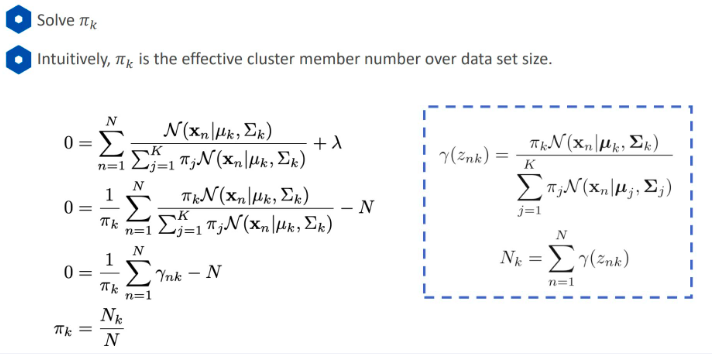
总结:
给定数据集 { x 1 , x 2 , . . . , x n } \{x_1,x_2,...,x_n \} {x1,x2,...,xn}, x n ∈ R D x_n \in \mathbb{R}^D xn∈RD,和聚类数量 k,如何求解GMM 的极大似然估计?
-
Step-1: 初始化 k 个高斯分布 { π k , μ k , Σ k } \{ \pi_k,\mu_k,\Sigma_k \} {πk,μk,Σk}
-
E-step: 求解一个点属于一个高斯分布的概率 p ( z n k = 1 ∣ x n ) p(z_{nk}=1|x_n) p(znk=1∣xn)

-
M-step: 利用MLE估算高斯分布模型参数、

-
迭代执行E-step、M-step,直到算法收敛。

3.2 代码练习
- 定义存储聚类结果的结构体
- 成员属性:id, pi, mu, sigma. delta
- 成员方法:有参构造函数,概率计算函数
typedef struct GMMCluster{// 成员int id;Eigen::VectorXd mu;Eigen::MatrixXd sigma;double pi;double delta; // 记录聚类中心更新前后的变化量// 方法 double probability(const Eigen::VectorXd& x){// 指数 -1/2 * (x-mu).t * sigma.inverse() * (x-mu)Eigen::VectorXd exp_index = (x - mu).transpose() * sigma.inverse() * (x - mu);exp *= -1. / 2;// 系数double coefficient = 1 / std::pow(2 * M_PI, mu.size() / 2) * 1 / std::pow(sigma.determinant(), 0.5);// 概率值double result = coefficient * exp(exp_index);return result;}GMMCluster(int id_, double pi_): id(id_), pi(pi_){delta = std::numeric_limits<double>::max();}}GMMCluster;
- 聚类中心初始化
bool init_clusters(int k){// 判断样本集数据是否小于 ksize_t data_size = _data.cols(); // _data为输入数据,大小是dxn,d表示维度,n表示样本数if(data_size < k) {std::cerr << "data_size < k: " << data_size << " : " << k << std::endl;return false;}// 从样本集中随机选取 k 个聚类中srand(int(time(0)));std::set<int> idx_removed;for(int i = 0; i < k;){int idx = rand() % data_size;// 去重if(idx_removed.count(idx) != 0){continue;}GMMCluster cluster(i, 1. / k);cluster.mu = _data.col(idx);cluster.sigma = Eigen::MatrixXd::Identity(_data.rows(), _data.rows());_clusters.emplace_back(cluster); // 不要忘记把已选取的随机点添加到set中!!!idx_removed.insert(idx);++i;}// 初始化Znk矩阵 nxk n行表示n个样本数据,k列表示每个点归属于当前类别的概率_Z_nk = Eigen::MatrixXd::Zero(_data.cols(), k);return true;
}
- E-step:求解一个点x_n属于一个类别(高斯分布 k)的概率

// _Z_nk 是一个 nxk的矩阵,每一行表示当前点归属于 k 个高斯分布的概率
// 计算每个点归属于 k 个类别的概率,即 Z_nk 矩阵
bool E_step(){// 遍历每个点,并计算其归属于 k 个类别的概率for(int n = 0; n < _data.cols(); ++n){// 计算当前点在 k 个分布上的总概率double total_prob = 0.;for(int k = 0; k < _Z_nk.cols(); ++k){total_prob += _clusters[k].pi * _clusters[k].probability(_data.col(n));}// 计算更新当前点归属于 k 个分布的概率for(int k = 0; k < _Z_nk.cols(); ++k){double prob = _clusters[k].pi * _clusters[k].probability(_data.col(n));_Z_nk(n, k) = prob / total_prob;}}return true;
}
- M-step:利用MLE估计高斯分布模型参数

// 利用MLE更新高斯分布模型参数(pi, mu, sigma)
bool M_step(){// 需要用到 N_k, 表示指定分布k时,所有点在该分布上的概率加和Eigen::VectorXd Z_nk_sum = _Z_nk.colwise().sum();// 更新 k 个分布的参数for(size_t k = 0; k < _clusters.size(); ++k){double N_k = Z_nk_sum(k);// 更新 muEigen::VectorXd new_mu_ = (_Z_nk.col(k).transpose() * _data.transpose()) / N_k;Eigen::VectorXd new_mu = new_mu_.transpose();// 更新 sigmaEigen::MatrixXd new_sigma = Eigen::MatrixXd::Zero(_data.rows(), _data.rows());for(size_t n = 0; n < _data.cols(); ++n){new_sigma += _Z_nk(n, k) * (_data.col(n) - new_mu) * (_data.col(n) - new_mu).transpose();}new_sigma /= N_k;// 更新 pidouble new_pi = N_k / _data.cols();// 判断是否存在奇点情况if(new_sigma.determinant() > 1e-6){// 正常更新 模型参数_clusters[k].delta = (new_mu - _clusters[k].mu).norm();_clusters[k].mu = new_mu;_clusters[k].sigma = new_sigma;_clusters[k].pi = new_pi;}else{srand(int(time(0)));int idx = rand() % _data.cols();_clusters[k].mu = _data.col(idx);_clusters[k].sigma = Eigen::MatrixXd::Identity(_data.rows(), _data.rows());}}return true;
}
- 迭代执行E-step、M-step,直到收敛。
bool compute(int k, int max_step=100, double min_update_size=0.01){// 聚类分布初始化if(!init_clusters(k)){std::cerr << "initial cluster failure!" << std::endl;return false;}// 迭代int i = 0;for(i = 0; i < max_step; ++i){std::cout << "Iteration: " << i << std::endl;// E-stepif(!E_step()){std::cerr << "E_step failure!" << std::endl;return false;}// M_stepif(!M_step()){std::cerr << "M_step failure!" << std::endl;return false;}// 判断是否收敛double update_size = get_update_size();if(update_size < min_update_size){std::cout << "update_size < min_update_size: " << update_size << " : " << min_update_size << std::endl;break;}}// 判断是否达到了最大迭代次数if(i >= max_step){std::cout << "reach max_step: " << max_step << std::endl;}return true;
}
声明:以上公式和图片来自课程上的PPT部分,小部分参考借鉴了其他博主,仅作为学习、交流使用。

![[ LeetCode ] 题刷刷(Python)-第66题:加一](/images/no-images.jpg)