0. 简介
高精地图作为自动驾驶中最关键的组成部分,矢量化高精(HD)地图包含有关周围道路元素的详细信息,这对于现代自动驾驶汽车的各项下游任务是至关重要的,例如车辆规划和控制。最近的工作试图直接检测矢量化高精地图,将其作为点集预测任务,从而显著提高了检测性能。然而,这些方法无法分析并且利用预测点之间的内部实例相关性,这阻碍了进一步的发展。《INSIGHTMAPPER: A CLOSER LOOK AT INNERINSTANCE INFORMATION FOR VECTORIZED HIGHDEFINITION MAPPING》利用内部实例信息通过Transformers进行矢量化高精建图,并且引入了InsightMapper。本文提出了InsightMapper中的三种新型设计,其通过不同的方式利用内部实例信息,包括混合查询生成、内部实例查询融合以及内部实例特征聚合。并最终完成了建图。具体的项目代码在github上可以查到。
1. 主要贡献
本文的贡献总结如下:
1)本文研究了内部实例点之间的相关性,证明了利用内部实例点信息可以有效地提高最终性能;
2)为了更好地利用内部实例信息,本文引入了一个称为InsightMapper的新模型,用于在线高精地图检测。InsightMapper包含三个具有不同功能的新型模块,包括查询生成、查询融合以及内部实例自注意力;
3)本文评估了所有的模块设计以及nuScenes数据集上的基线。InsightMapper的性能优于所有基线模型,并且维持了具有竞争力的效率。

3. 具体方法
3.1 概述
在VectorMapNet(Liu等,2022)和MapTR(Liao等,2022)的基础上,我们提出的InsightMapper是一个端到端可训练的网络,用于在线矢量化高清地图检测。与MapTR不同,InsightMapper利用内部实例信息来融合对象查询并在可变形Transformer解码器层中聚合中间特征。否则,相邻顶点可能会产生独立的位置回归结果,导致出现锯齿状甚至错误的实例。通过内部实例信息的辅助,模型可以更好地优化和细化实例内部点的位置,显著提高最终性能。
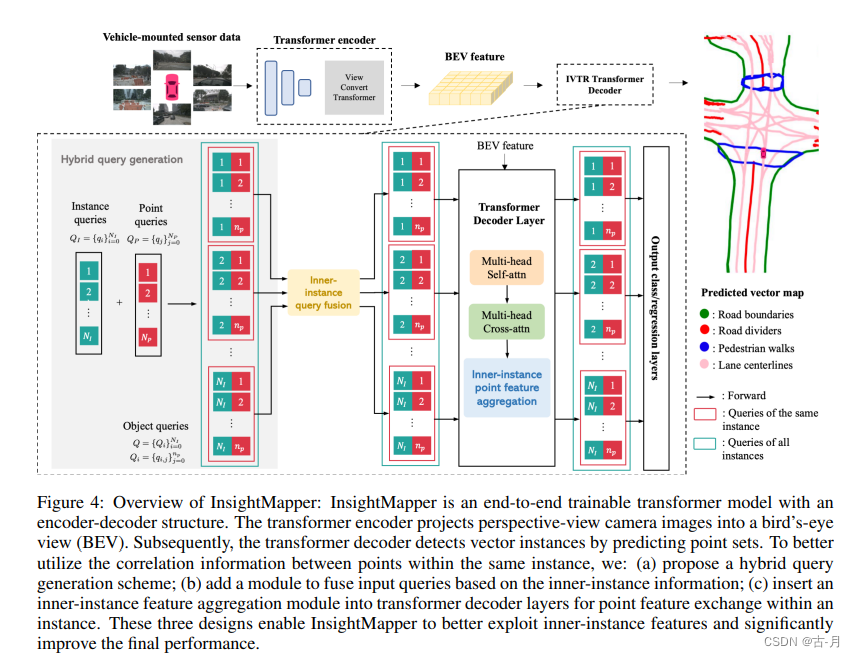
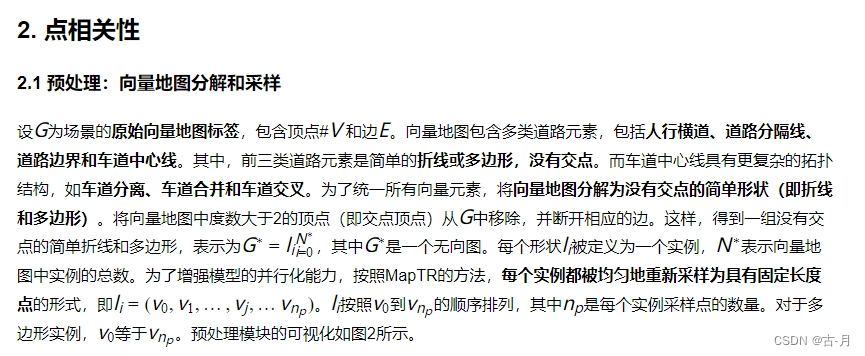
图4:InsightMapper概述:InsightMapper是一个端到端可训练的Transformer模型,具有编码器-解码器结构。Transformer编码器将透视视角相机图像投影到鸟瞰图(BEV)中。随后,Transformer解码器通过预测点集来检测向量实例。为了更好地利用同一实例内点之间的相关信息,我们:(a)提出了一种混合查询生成方案;(b)添加了一个基于实例内信息融合输入查询的模块;(c)在Transformer解码器层中插入了一个实例内特征聚合模块,用于实例内点特征交换。这三个设计使InsightMapper能够更好地利用实例内特征,并显著提高最终性能。
点击经典文献阅读之--InsightMapper(深入研究矢量化高精地图的内部实例信息) - 古月居可查看全文