
这段代码的主要作用是计算图像的单应性矩阵,并使用该矩阵对图像进行透视变换。具体来说,它的功能包括:
1. **单应性矩阵估计**:
- 使用给定的四对对应点(通常是从源图像和目标图像提取的特征点),计算出一个3x3的单应性矩阵。这个矩阵描述了从源图像到目标图像的平面映射关系。
2. **图像透视变换**:
- 利用计算出的单应性矩阵对源图像进行透视变换,从而将源图像中的某一平面变换为目标图像中的对应平面。这个过程可以校正图像中的透视失真,或者进行图像配准等操作。
3. **结果展示**:
- 变换后的图像通过`matplotlib`进行显示,展示了透视变换的结果。这通常用于验证单应性矩阵的计算是否正确,以及变换效果是否符合预期。
这种操作在计算机视觉中非常常见,特别是在图像拼接(如全景照片生成)、图像校正(如去除相机角度导致的失真)以及增强现实应用中。
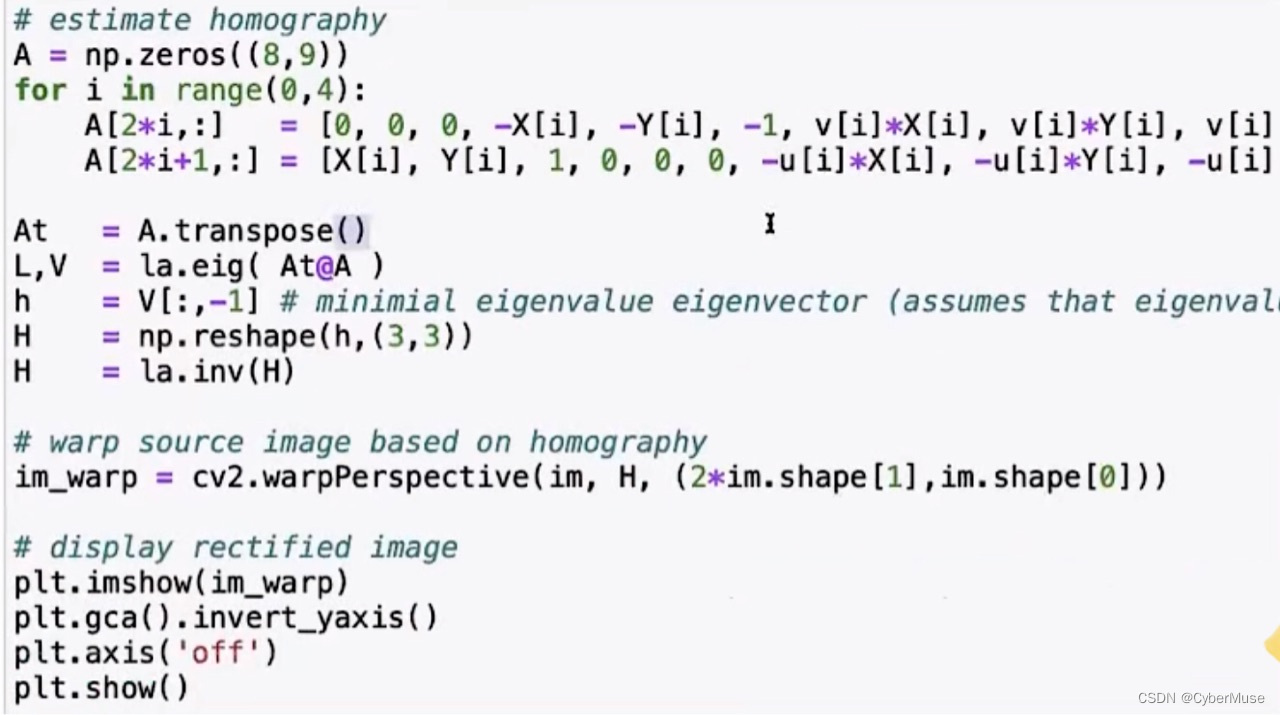
以下是校对后的代码版本:
```python
import numpy as np
import cv2
import matplotlib.pyplot as plt
# estimate homography
A = np.zeros((8, 9))
for i in range(0, 4):
A[2*i, :] = [0, 0, 0, -X[i], -Y[i], -1, v[i]*X[i], v[i]*Y[i], v[i]]
A[2*i+1, :] = [X[i], Y[i], 1, 0, 0, 0, -u[i]*X[i], -u[i]*Y[i], -u[i]]
At = A.transpose()
L, V = np.linalg.eig(At @ A)
h = V[:, -1] # minimal eigenvalue eigenvector (assumes that eigenvalue is sorted)
H = np.reshape(h, (3, 3))
H = np.linalg.inv(H)
# warp source image based on homography
im_warp = cv2.warpPerspective(im, H, (2*im.shape[1], im.shape[0]))
# display rectified image
plt.imshow(im_warp)
plt.gca().invert_yaxis()
plt.axis('off')
plt.show()
```
### 代码解释
1. **导入库**:
```python
import numpy as np
import cv2
import matplotlib.pyplot as plt
```
- 导入必要的库,`numpy`用于数值计算,`cv2`用于图像处理,`matplotlib.pyplot`用于图像显示。
2. **估计单应性矩阵**:
```python
A = np.zeros((8, 9))
```
- 创建一个8x9的零矩阵`A`,用于存放线性方程组的系数。
```python
for i in range(0, 4):
A[2*i, :] = [0, 0, 0, -X[i], -Y[i], -1, v[i]*X[i], v[i]*Y[i], v[i]]
A[2*i+1, :] = [X[i], Y[i], 1, 0, 0, 0, -u[i]*X[i], -u[i]*Y[i], -u[i]]
```
- 填充矩阵`A`的行。每组点对提供两行数据,分别对应单应性条件的两个方程,`(X[i], Y[i])`是源图像的坐标,`(u[i], v[i])`是目标图像的坐标。
3. **计算特征值和特征向量**:
```python
At = A.transpose()
L, V = np.linalg.eig(At @ A)
```
- 计算`At @ A`的特征值`L`和特征向量`V`。特征向量用于求解单应性矩阵。
4. **提取单应性矩阵**:
```python
h = V[:, -1] # minimal eigenvalue eigenvector
H = np.reshape(h, (3, 3))
```
- 提取最小特征值对应的特征向量`h`,并将其重塑为3x3矩阵`H`。
5. **计算单应性矩阵的逆**:
```python
H = np.linalg.inv(H)
```
- 计算单应性矩阵`H`的逆,用于从目标图像到源图像的反向映射。
6. **应用单应性矩阵进行图像变换**:
```python
im_warp = cv2.warpPerspective(im, H, (2*im.shape[1], im.shape[0]))
```
- 使用OpenCV的`warpPerspective`函数应用单应性矩阵对图像`im`进行透视变换。输出图像的宽度为原图像的两倍,高度保持不变。
7. **显示变换后的图像**:
```python
plt.imshow(im_warp)
plt.gca().invert_yaxis()
plt.axis('off')
plt.show()
```
- 使用`matplotlib`显示变换后的图像,反转y轴并关闭坐标轴以便更好地查看图像。
确保在实际使用中定义和初始化`X`, `Y`, `u`, `v`以及`im`等变量,以避免运行时错误。




