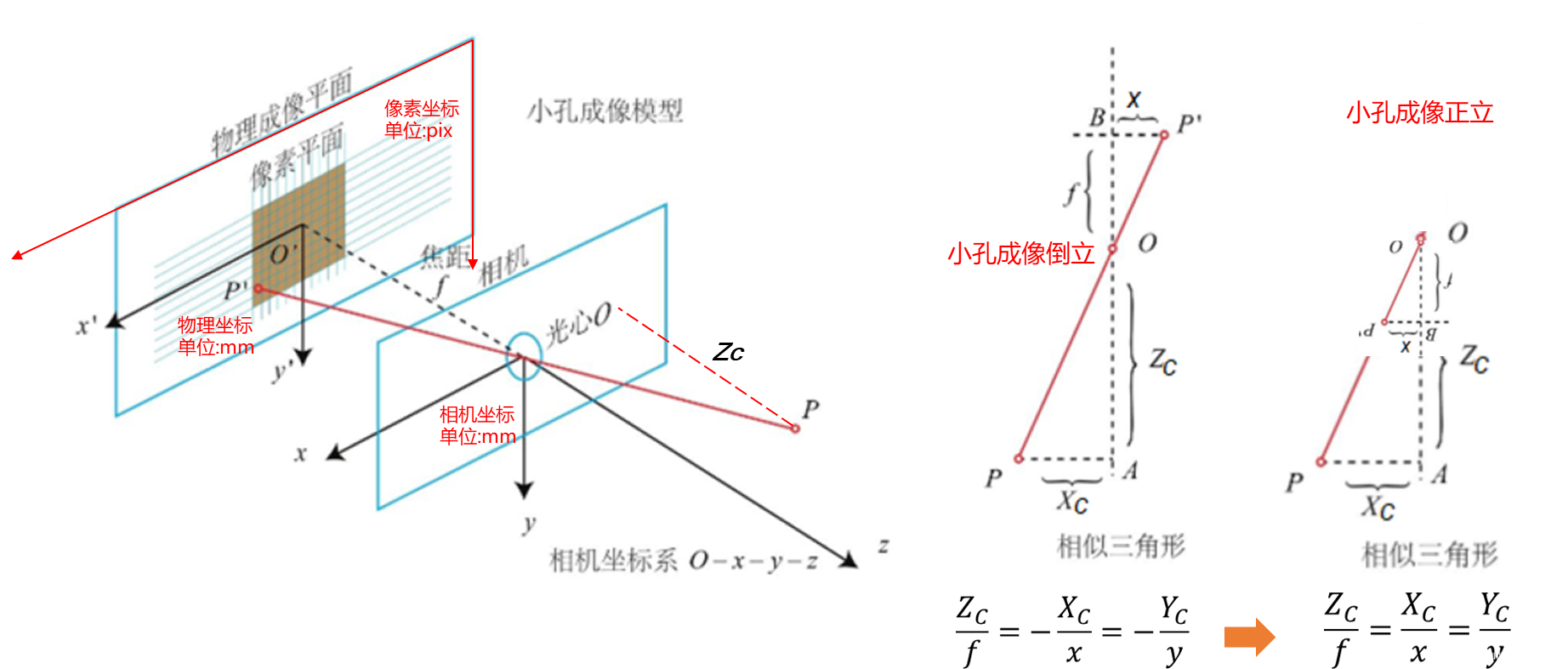
一、理论分析


二、其他分析
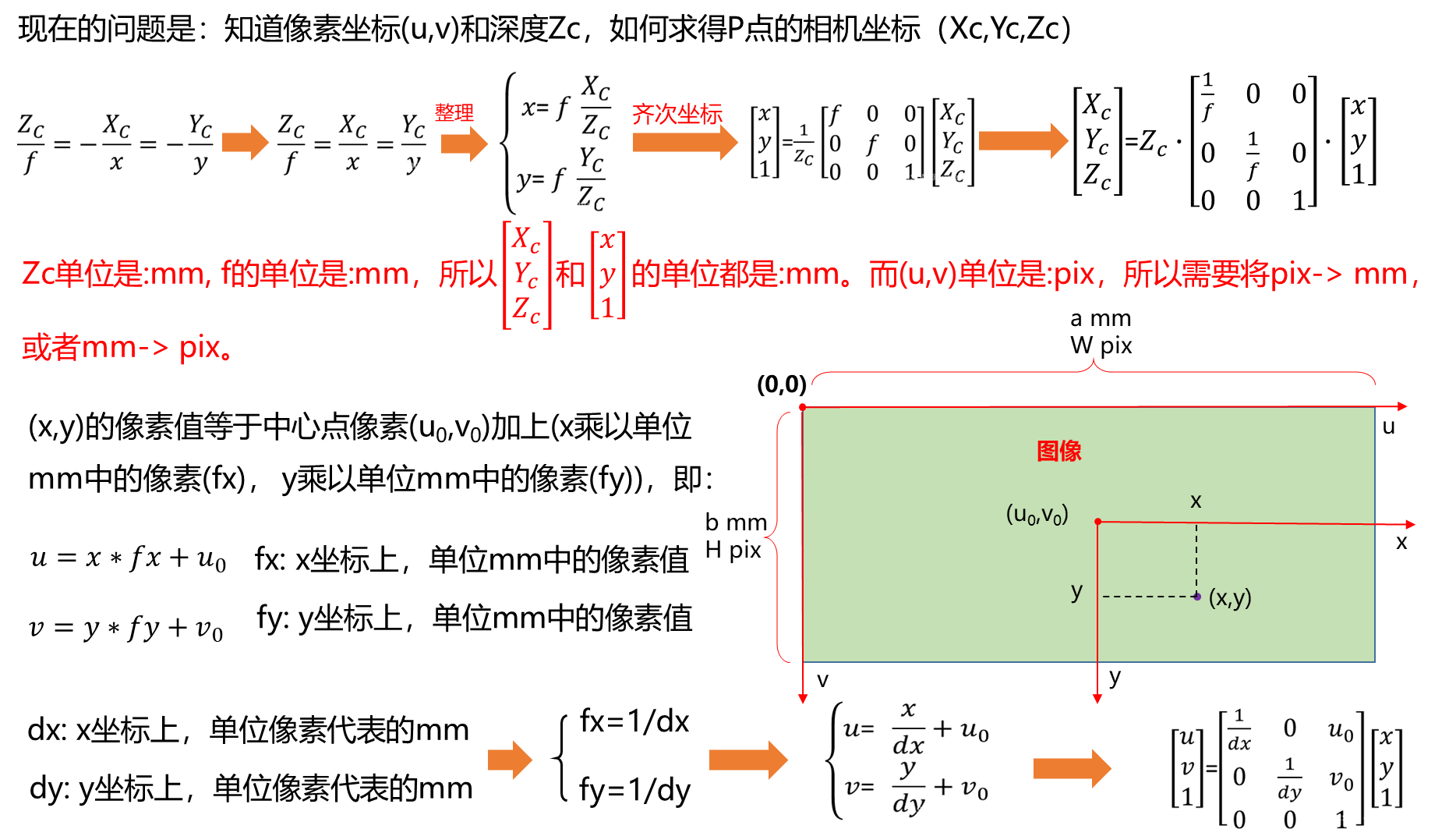
1、相机内参
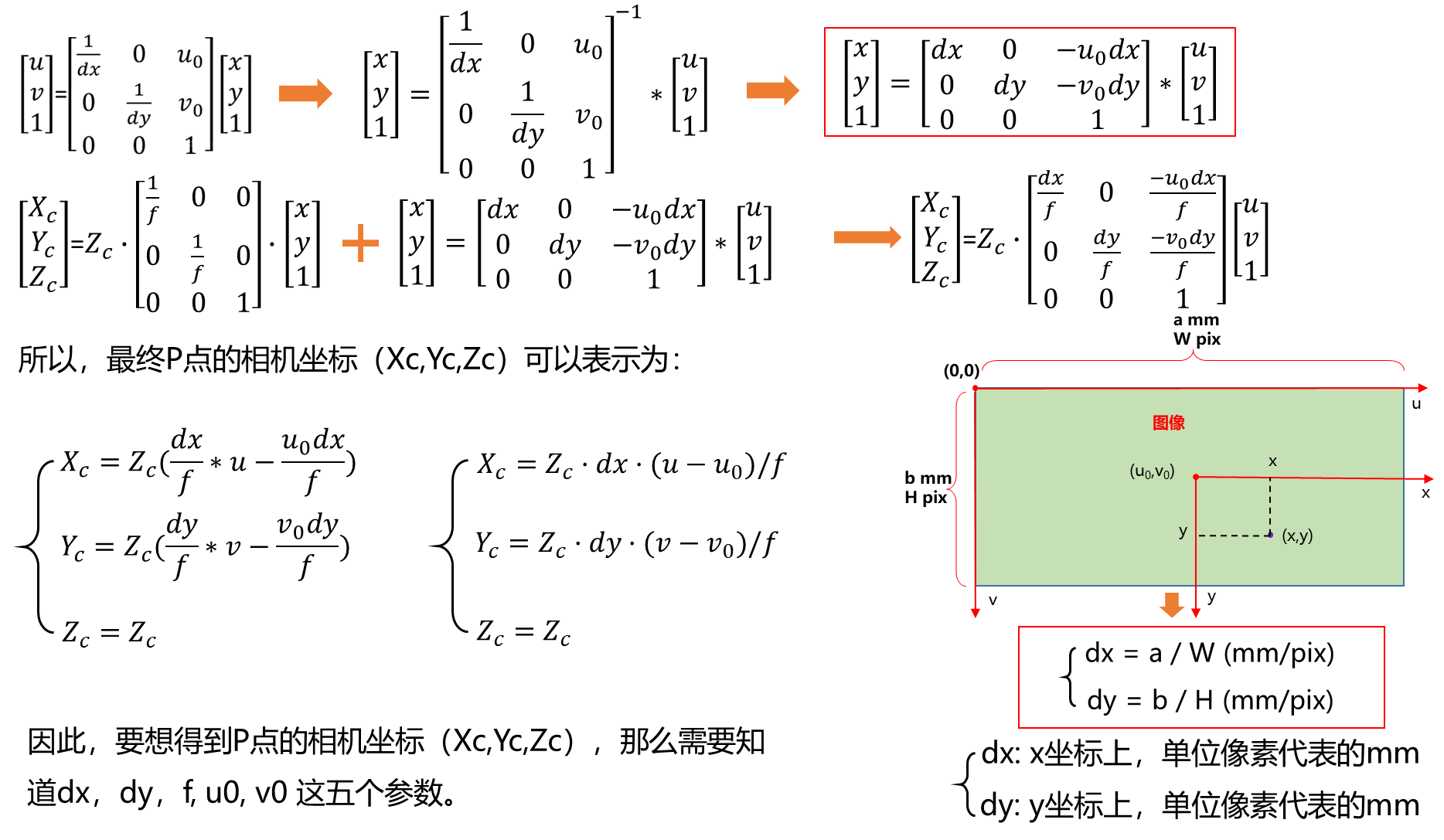
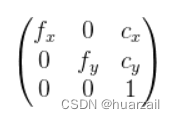
相机内参主要是四个参数fx,fy,u0,v0。要明白相机内参就是相机内部参数,是参考像素坐标系而言,有了这个前提,这四个参数也就很好理解了。
(1)首先,![]() 。其中F是相机的焦距,dx和dy是单个像素的水平和竖直的物理尺寸,也就是一个像素实际的宽和高。因为相机参照的是像素坐标系,所以相机的焦距自然应该转变成像素坐标系下的形式。
。其中F是相机的焦距,dx和dy是单个像素的水平和竖直的物理尺寸,也就是一个像素实际的宽和高。因为相机参照的是像素坐标系,所以相机的焦距自然应该转变成像素坐标系下的形式。
(2)然后![]() 分别代表图像中心的像素坐标到像素坐标系原点的水平距离和竖直距离,理论上应该是图片水平分辨率和竖直分辨率的一半,但实际情况下并不是,存在偏差。
分别代表图像中心的像素坐标到像素坐标系原点的水平距离和竖直距离,理论上应该是图片水平分辨率和竖直分辨率的一半,但实际情况下并不是,存在偏差。
2、相机外参
相机外参的创造是服务于相机与世界坐标系或者与其他传感器如相机、激光雷达等之间的转换。具体包括欧拉角(ω、δ、 θ)和平移向量(Tx、Ty、Tz),根据欧拉角,将其分别代入对应的旋转矩阵并依次相乘即可获得两个坐标系之间的旋转矩阵。
详细信息请参考:
相机内参和外参_相机标定内参fx是什么意思-CSDN博客
KITTI数据集的点云生成分析:
KITTI数据集内参文件解析-CSDN博客
KITTI数据集介绍 - 知乎
参考文献:
[1] 深度图转点云原理 - 知乎