MT6701_0"> HAL STM32 SSI/SPI方式读取MT6701磁编码器获取角度例程
- 📍相关篇《HAL STM32 I2C方式读取MT6701磁编码器获取角度例程》
- 📌当前最新MT6701数据手册:
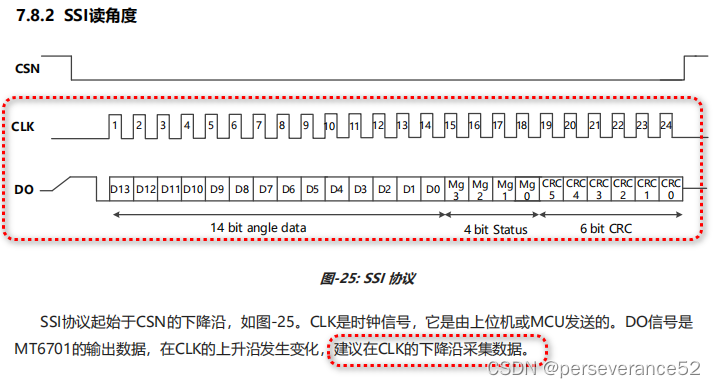
https://www.magntek.com.cn/upload/MT6701_Rev.1.8.pdf - 📜SSI协议读角度,时序和数据关系
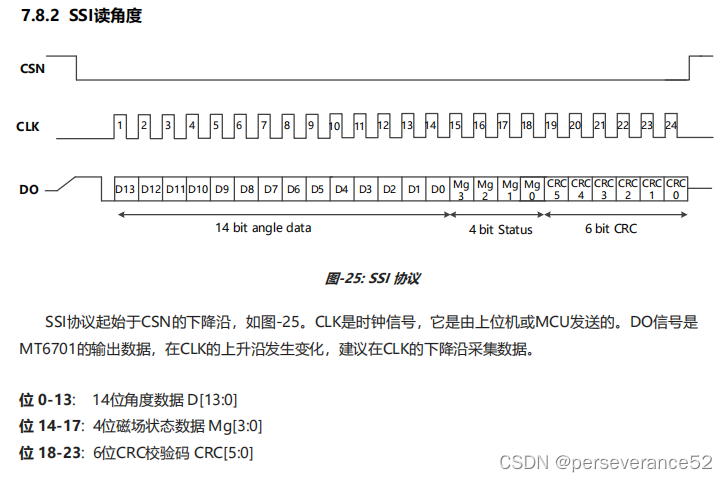
SSI方式完全可以使用3个IO配置为输入输出模式(两个配置为输出,一个配置为输入),通过SSI协议,读取电平状态,实现对数据解析。
- 📝SSI核心代码实现:(参考《STM32 HAL库 驱动 MT6701 磁编码器》)
#define Loss_of_Track 4
#define Button_Detected 3
#define Field_Weak 2
#define Field_Strong 1
#define Normal 0/** SSI 方式读取信息* mode == 0 返回角度信息,0~360 浮点数* mode == 1 返回磁场信息*/
double ReadDataSSI(uint8_t mode)
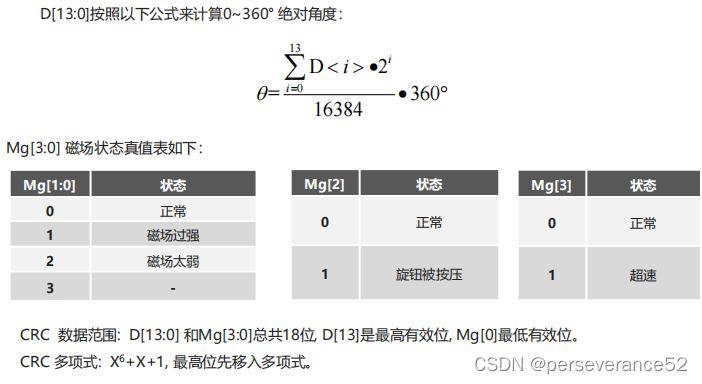
{uint8_t RawData[25] = {0};uint16_t angle = 0;double fangle = 0;HAL_GPIO_WritePin(SSI_CSN_GPIO_Port,SSI_CSN_Pin,GPIO_PIN_RESET); //起始信号Delay_us(2);HAL_GPIO_WritePin(SSI_CLK_GPIO_Port,SSI_CLK_Pin,GPIO_PIN_RESET); //跳过第一个时钟沿Delay_us(2);HAL_GPIO_WritePin(SSI_CLK_GPIO_Port,SSI_CLK_Pin,GPIO_PIN_SET);Delay_us(2);for(uint8_t i = 0; i < 25; i++) //读取数据{HAL_GPIO_WritePin(SSI_CLK_GPIO_Port,SSI_CLK_Pin,GPIO_PIN_RESET);RawData[i] = HAL_GPIO_ReadPin(SSI_DI_GPIO_Port,SSI_DI_Pin);HAL_GPIO_WritePin(SSI_CLK_GPIO_Port,SSI_CLK_Pin,GPIO_PIN_SET);Delay_us(2);}HAL_GPIO_WritePin(SSI_CSN_GPIO_Port,SSI_CSN_Pin,GPIO_PIN_SET); //结束信号for(uint8_t i = 0; i < 14; i++)angle += RawData[i] * (2 << (13 - i));fangle = (double)(angle * 180.0) / 16384.0; //角度信息switch (mode){case 0:return fangle;case 1:{if(RawData[14])return Loss_of_Track;else if(RawData[15])return Button_Detected;else if(RawData[16])return Field_Weak;else if(RawData[17])return Field_Strong;elsereturn Normal;}default:return 0;}
}- 🌿引脚配置:

📚SSI测试工程
链接:https://pan.baidu.com/s/1es233q_NBo_s_fLkgbmTjw?pwd=r90i
提取码:r90i
⛳SPI方式
📗STM32 SPI参数配置:
-
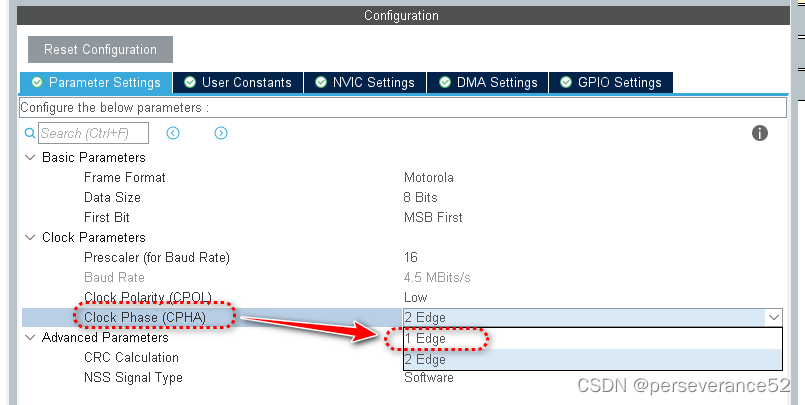
🌿STM32CubeMX中SPI基本配置信息:(其中
Data Size,这里选择配置的是8位,配置16位也是可以的,不过软件编程上就与8位的编程代码就不同,不通用)。

-
SPI串行同步时钟可以设置为不同的极性(Clock Polarity ,CPOL)与相位(Clock Phase ,CPHA)。
-
时钟的极性(CPOL)用来决定在总线空闲时,同步时钟(SCK)信号线上的电位是高电平还是低电平。
-
当时钟极性为0时(CPOL=0),SCK信号线在空闲时为低电平;当时钟极性为1时(CPOL=1),SCK信号线在空闲时为高电平;
-
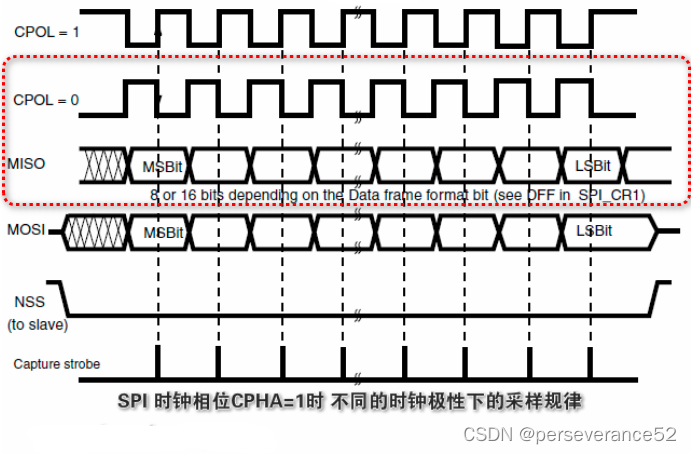
时钟的相位(CPHA)用来决定何时进行信号采样。
-
当时钟相位为1时(CPHA=1),在SCK信号线的
第二个跳变沿进行采样;这里的跳变沿究竟是上升沿还是下降沿,取决于时钟的极性。当时钟极性(CPOL)为0时,取下降沿;当时钟极性(CPOL)为1时,取上升沿;如下图:
-
🔖设置依据:根据手册SSI协议,可知:CLK空闲状态为low,决定CPOL配置为low,推荐CLK下降沿采集数据,那就配置CPHA为2,在SCK信号线的
第二个跳变沿进行采样。
- 🌾 补充:
-
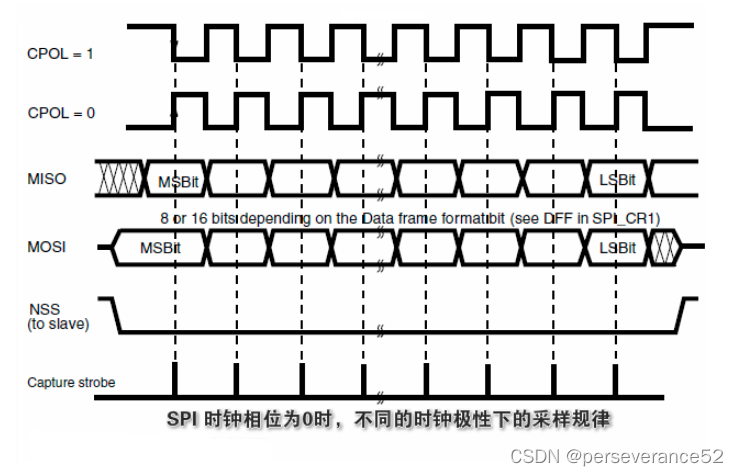
- 当时钟相位为0时(CPHA=0),在SCK信号线的
第一个跳变沿进行采样。跳变沿同样与时钟极性有关:当时钟极性为0时,取上升沿;当时钟极性为1时,取下降沿;如下图:
- 当时钟相位为0时(CPHA=0),在SCK信号线的
- 对应:
SPI数据读取和转换实现
void MT6701_Read_RAW(uint8_t* pBuffer)
{ uint16_t i; MT6701_CSN_CLR;//MT6701_CSN=0 //片选 for (i = 0; i < 4; i++){ pBuffer[i]=SPIx_ReadWriteByte(0xFF); //循环读入字节数据 } MT6701_CSN_SET; //MT6701_CSN=1
} /*!* @brief Return position of encoder* @return Angle value of encoder position*/
float angleRead( void ){float angle_f = 0.0f;uint8_t data[3];uint16_t angle_u16;MT6701_Read_RAW(data);angle_u16 = (uint16_t)(data[1] >> 2);angle_u16 |= ((uint16_t)data[0] << 6);angle_f = (float)angle_u16 * (360.0f/16384.0f);return angle_f;
}
- 🎉优化处理
//angle_raw返回原始角度数据,angle转换后的角度值:0-360,field_status磁场强度;
void mt6701_read(uint16_t*angle_raw, float*angle, uint8_t*field_status)
{float angle_f = 0.0f;uint8_t status;uint8_t data[3];uint16_t angle_u16;MT6701_Read_RAW(data);angle_u16 = (uint16_t)(data[1] >> 2); //原始值angle_u16 |= ((uint16_t)data[0] << 6);status = (data[2] >> 6);status |= (data[1] & 0x03) << 2;if(angle_raw != NULL) {*angle_raw = angle_u16;}if(angle != NULL) {angle_f = (float)angle_u16 * (360.0f / 16384.0f);*angle = angle_f;}if(field_status != NULL) {*field_status = status & 0x03;}
}
- 🔖测试效果:
📚SPI测试代码
链接:https://pan.baidu.com/s/1X3vUEo5mW3vEGRbXftowxw?pwd=7o6g
提取码:7o6g
📙读取24位数据并CRC校验功能测试
- 📝代码实现部分:
unsigned int Angle = 0;
uint32_t AngleIn24bits = 0;
uint8_t Spi_TxData[4]={0x83,0xff,0xff,0xff};///03 04 05 寄存器存角度
uint8_t Spi_pRxData[4]={0};uint32_t ReadAngle(void)
{//Read in Burst modeHAL_GPIO_WritePin(MT6701_CS_GPIO_Port, MT6701_CS_Pin, GPIO_PIN_RESET);///CSN LOW HAL_SPI_TransmitReceive(&hspi1, &Spi_TxData[0], &Spi_pRxData[0],0x03,0xffff);HAL_GPIO_WritePin(MT6701_CS_GPIO_Port, MT6701_CS_Pin, GPIO_PIN_SET);///CSN HIGHAngleIn24bits= (Spi_pRxData[0]<<16)|(Spi_pRxData[1]<<8)|(Spi_pRxData[2]);// AngleIn14bits >>= 10;return (AngleIn24bits);
}
uint8_t crc6(uint8_t *data, uint8_t length)
{ uint8_t i; uint8_t crc = 0; // Initial value while(length--) { crc ^= *data++; // crc ^= *data; data++;for (i=6; i>0; --i) { if (crc & 0x20)crc = (crc << 1) ^ 0x03;elsecrc = (crc << 1);}} return crc&0x3f;
} int main(void)
{/* USER CODE BEGIN 1 */uint8_t s[3];uint8_t crcvalue = 0;uint32_t AngleInHex = 0;float angle=0.0f;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_SPI1_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */AngleInHex = ReadAngle();s[0]=AngleInHex>>18;s[1]=AngleInHex>>12;s[2]=AngleInHex>>6;if(crc6(s, 3)==(AngleInHex&0x3f)){ printf("\r\nReadcrc=0x%x\r\n",AngleInHex&0x3F);printf("Cacucrc=0x%x\r\n",crc6(s, 3)&0x3F);printf("%.2f\r\n",(AngleInHex>>10)*360/16384.0);printf("%X\r\n",AngleInHex);HAL_Delay(5);printf("\n-------------------\n");HAL_Delay(5);}else{printf("\r\nReadcrc=0x%x\r\n",AngleInHex&0x3F);printf("Cacucrc=0x%x\r\n",crc6(s, 3)&0x3F);printf("CRC check error!\r\n");printf("%.2f\r\n",(AngleInHex>>10)*360/16384.0);HAL_Delay(5);printf("\n\r--------------------\n\r");}HAL_Delay(500);}/* USER CODE END 3 */
}
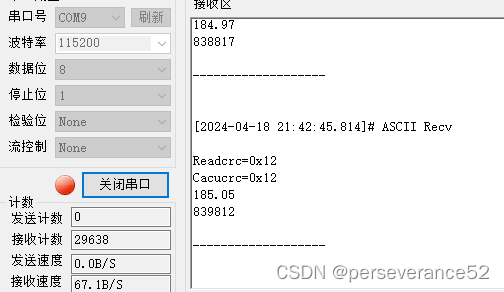
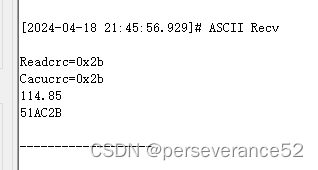
- 📄打印测试
📚读取数据并带CRC校验测试工程
链接:https://pan.baidu.com/s/1p-tUWT0P2aetlLwCr9X-IQ?pwd=1epn
提取码:1epn
📘SPI +DMA读取数据并带CRC校验测试工程
- 🥕基于
读取数据并带CRC校验测试工程版本基础上调整而来的。
链接:https://pan.baidu.com/s/1GCT23_lJC4ocbHautazoxg?pwd=9kvi
提取码:9kvi