大家好,今天要介绍的API为相机相关的API,这篇文章比较适合女孩子,学会了相机就会拍照了,哈哈。
下面是要介绍的API:
(1)第一个为GetFocalDistance,这个API的含义为获取相机的焦距,下方是官方的具体解释:

其API没有输入参数,只有返回值为相机的焦距。使用的时候还是先看备注,非常重要,非常重要,非常重要,重要的事情说三遍。
下面是官方使用的例子:
This example shows how to insert a camera and print out its settings.
//---------------------------------------------------------------
// Preconditions:
// 1. Open a model document that does not have any cameras inserted.
// 2. Open the Immediate window.
//
// Postconditions:
// 1. Inserts a camera in the model document.
// 2. Click View > Lights and Cameras > Properties > Camera1.
// 3. Click Zoom to Fit.
// 4. Examine the Immediate window, the graphics area, and the
// Camera1 PropertyManager page.
//-------------------------------------------------------------
using SolidWorks.Interop.sldworks;
using SolidWorks.Interop.swconst;
using System.Runtime.InteropServices;
using System;
using System.Diagnostics;namespace Macro1CSharp.csproj
{public partial class SolidWorksMacro{public void Main(){ModelDoc2 swModel = default(ModelDoc2);ModelDocExtension swModelDocExt = default(ModelDocExtension);Camera swCamera = default(Camera);swModel = (ModelDoc2)swApp.ActiveDoc;swModelDocExt = (ModelDocExtension)swModel.Extension;// Insert a cameraswCamera = (Camera)swModelDocExt.InsertCamera();// Print out camera settingsDebug.Print("ID = " + swCamera.ID);Debug.Print("Focal distance = " + swCamera.GetFocalDistance() * 1000.0 + " mm");Debug.Print("Perspective mode = " + swCamera.Perspective);Debug.Print("Depth of field effects enabled = " + swCamera.DepthOfFieldEnabled);Debug.Print("Distance from focal plane to where focus is lost = " + swCamera.DepthOfFieldOffset * 1000.0 + " mm");Debug.Print("Horizontal angle of the field of view = " + swCamera.FieldOfViewAngle * 1000.0 + " mm");Debug.Print("Depth of the field of view = " + swCamera.FieldOfViewDepth * 1000.0 + " mm");Debug.Print("Height of the field of view = " + swCamera.FieldOfViewHeight * 1000.0 + " mm");}/// <summary>/// The SldWorks swApp variable is pre-assigned for you./// </summary>public SldWorks swApp;}
}
(2)第二个为GetPosition,这个API的含义为获取相机的当前位置,下面是官方的具体解释:
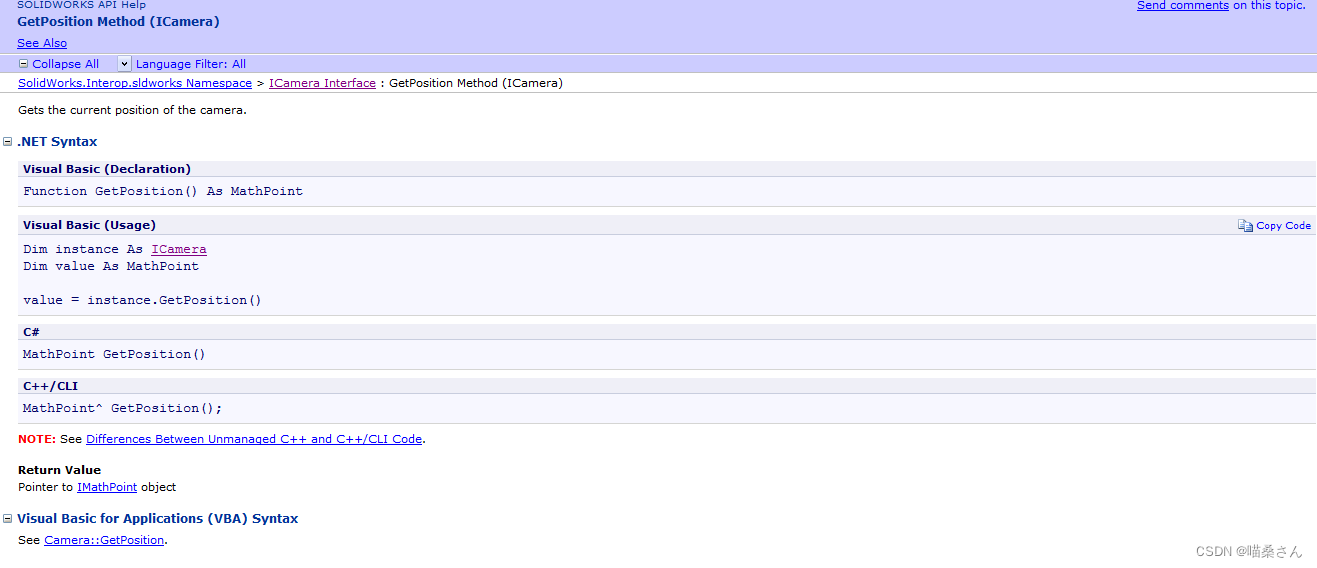
其没有输入值,返回值为相机的当前位置IMathPoint。
本篇文章要介绍的就是这么多,我们下篇文章再见。