为把握智能交通系统发展机遇,探索未来城市智能化交通体系,今年3月,腾讯无人驾驶汽车正式落地深圳智能网联交通示范区;该项目将以智能网联测试为基础,以构建自动驾驶生态和未来交通体系为导向,围绕"车、路、云、网、图"五大要素,结合5G、自动驾驶、人工智能等新一代技术,布局建设面向未来智能网联汽车研发、测试的全生态体系,建成国际领先的智能网联交通系统测试基地。这是深圳坪山区政府,深交投,腾讯三方联合打造的示范区无人驾驶项目。作为腾讯在边缘计算领域的重要供应商之一,为深圳智能网联交通测试项目提供了领先的边缘计算产品支持。
目前随着5G、人工智能、大数据等技术的不断突破和应用。无人驾驶作为人工智能的主要应用场景之一,已成为众多企业重点关注的领域。在无人驾驶技术大力发展的时代,智慧交通与车联网的高效协同是实现安全无人驾驶的基石。传统驾驶使用人脑和人眼在道路上驾驶,而无人驾驶汽车依赖人工智能、边缘计算、雷达、监控设备和全球定位系统等协同工作;帮助无人驾驶设备做出正确且及时的反应。
无人驾驶汽车通过车载传感器来感知车辆周围的交通环境,并通过感知所获得的道路、车辆位置和障碍物信息,进行车辆转向、速度、形式路线的判断和执行。为了满足其严苛的行驶条件,其关键是选用一款工业级边缘计算产品,实现对感知单元数据的快速处理,以很好地实现安全无人驾驶的目的。
BRAV-7520作为一款专为智能AI边缘计算而设计的产品,为腾讯无人驾驶车辆提供强大支撑!无人驾驶的硬件系统,分为感知、决策、控制三个主导部分,而定位、地图、预测则是辅助部分,具体硬件组成如C-V2X车路云解决方案架构图。
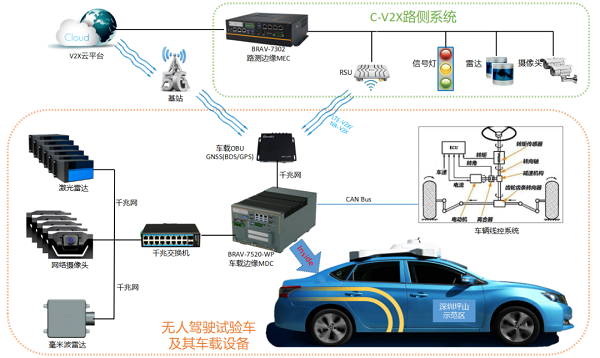
C-V2X车路云解决方案架构
车辆自身会感知到车的状态信息,如速度、转角以及横滚,俯仰、航向等,还有路面环境感知,如激光雷达、摄像头、毫米波雷达和定位信息。C-V2X的路侧系统和云端平台能提供超视距功能——当车上了路,很难发现超传感器范围的信息,通过C-V2X设备会发送和接受相关信息,车会接收到前方交通的情况。
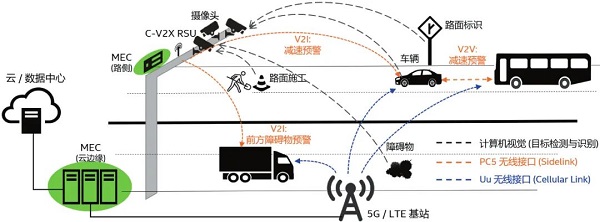

边缘计算产品7302在MEC中的应用实物图
目前L4和L5级自动驾驶的车载计算单元MDC是采用CPU+GPU的双重架构方案,OBU通信器采用FPGA架构。MDC(BRAV-7520-WP)通过交换机连接车载激光雷达、毫米波雷达和摄像头等车载传感器,经过深度学习推理计算,进行数据结构化融合;同时直连OBU通讯器后,可实现向上接的C-V2X网络感知到路侧和云端信息,而向下是接的CAN总线。通过CAN bus连接车载线控系统,线控系统实现车辆的制动、转向、发动机启停、变速箱和车门窗控制,还有声音、图像和振动的警告系统的自动控制。为高度无人驾驶提供强大支撑!



边缘计算产品7520-WP在MDC中的应用实景图
边缘计算7302和7520-WP产品特性

CPU和GPU独立风道散热设计
Intel™Kabylake-S/Sky lake-S Core I3/I5/I7 CPU
2*DDR4 2400/2133MHz SODIMM内存,最大32GB
NVIDIA Turing架构MXM GPU模块用于深度学习实现镭视融合数据结构化
1*DP,1*HDMI和1*VGA三核显,3*DP和1*HDMI四独显
3/7*LAN,4/6*USB3.0,3*USB2.0,4*COM,16*DIO,Audio
2*Mini PCIe(PCIe+USB),1*M.2 2242 B-Key
1*mSATA, 1/2*2.5" SATA3驱动架, 支持Raid0,1
支持Intel iVpro技术,实现远程管理,提高产品可维护性
高能效比架构方案,加上优化创新的热设计和结构设计,形成尺寸适中合适更多安装场景
DC 6~48V宽压供电、 短路、过压、过流和欠压保护

Intel™ XeonRE or 9th/8th Gen Core TM processor超高清双4K,三独立显示2*DP,1*VGA
Wp机型支持RTX-3080高算力GPU做深度学习实现镭视融合数据结构化
CAN bus总线,实现系统和车载线控系统的对接
3*Gig-LAN(可iATM),可选多路万兆光口卡双PCle标准插槽,支持多种高速扩展功能卡·多路存储
2*SATA3.0,1*M.2 M-Key,支持NVMe.CPU无风扇,AI/GPU卡高效风冷散热设计
整机结构和安装方式均按减震设计方案进行,适合车载环境
整机最大输出功率600W,可作单路350W
GPU卡或双路75W AI加速卡的供电支持
DC 9-55V宽压直流供电适合车载电池供电