概念
在计算机视觉和图像处理中,多边形和凸多边形是常用的几何形状描述方式。它们在描述对象的形状、边界或区域时非常有用。下面我将简要介绍它们的概念和特点:
多边形(Polygon)
定义: 多边形是一个平面内的闭合图形,由一系列连续的直线段连接而成,首尾相接,且不相交。
特点:
- 可能具有任意数量的顶点(大于等于3个)。
- 各个顶点之间的连接线段称为边。
- 多边形的内部区域称为内部,外部区域称为外部。
- 可以是凸多边形,也可以是凹多边形。
示例: 三角形、正方形、五边形等。
凸多边形(Convex Polygon):
定义: 凸多边形是一种特殊的多边形,其中任意两个顶点之间的连线都位于或在多边形内部。换句话说,凸多边形内部的任意一点都可以通过直线连接到多边形内的任意其他两点。
特点:
- 所有内角均小于180度。
- 任意两个点在多边形内的连线都位于多边形内或在多边形边界上。
- 凸多边形的外形呈现凸出的形状,没有凹进去的部分。
示例: 正方形、正五边形等。
区别与联系:
- 所有凸多边形都是多边形,但并非所有多边形都是凸多边形。
- 凸多边形的内部不存在凹陷,而一般的多边形可能存在凹陷。
- 在图像处理中,凸多边形通常更容易处理和计算,因为它们的几何特性更简单,可以更方便地进行边界检测、碰撞检测等操作。
- 在图像处理和计算机视觉领域,常常会使用凸多边形来简化复杂的多边形,以便于进行各种算法和分析。例如,可以使用凸包算法将复杂的多边形转化为凸多边形,以简化形状描述。
isContourConvex
用于检测轮廓是否为凸形的函数。
函数定义
bool cv::isContourConvex(const std::vector<Point>& contour)参数
contour: 输入轮廓,通常是一个std::vector<cv::Point>类型的容器,包含了组成轮廓的点的集合。每个Point对象代表图像中的一个像素坐标。
返回值
- 如果输入的轮廓是凸的,函数返回
true;否则返回false。
函数工作原理
- 函数通过执行一种快速的凸包测试来判断轮廓。它尝试找到一个点集的最小凸包,如果这个凸包恰好包含所有的轮廓点,那么轮廓就被认为是凸的。
- 凸包是包围一个形状的最小凸多边形,对于凸轮廓,凸包就是轮廓本身。对于凹轮廓,凸包会超出轮廓的某些部分。
示例用法
// 假设已从图像中找到轮廓
std::vector<std::vector<cv::Point>> contours;
cv::findContours(image, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);for (const auto& contour : contours) {if (cv::isContourConvex(contour)) {// 轮廓是凸的,执行相应的操作} else {// 轮廓是凹的,执行相应的操作}
}注意事项
- 轮廓必须是封闭的,也就是说,它的首尾点必须相连。
- 函数对输入轮廓的质量有一定要求,如果轮廓数据不准确或有噪声,可能会影响结果。
- 函数不适用于非连通的轮廓部分,它只能处理单个轮廓。
convexityDefects
用于检测和计算给定轮廓的凸包缺陷,即凸形物体上的凹陷或洞。下面是该函数的详细说明:
函数定义
void cv::convexityDefects(InputArray contour,InputArray convexHull,OutputArray convexityDefects
)参数
contour: 输入轮廓,通常是一个std::vector<cv::Point>或Mat类型的数据结构,包含了构成轮廓的点的集合。convexHull: 输入轮廓的凸包,同样是一个std::vector<cv::Point>或Mat类型的数据结构。这个参数通常可以通过调用cv::convexHull函数获得。convexityDefects: 输出的OutputArray,它将存储每个凸包缺陷的信息,每个缺陷由一个cv::Vec4i结构表示。
返回值
函数没有直接的返回值,而是将结果写入到 convexityDefects 输出数组中。
函数工作原理
- 首先,
cv::convexHull函数用于计算输入轮廓的凸包。 - 然后,
cv::convexityDefects检查轮廓上的每个点是否在其凸包内。如果不在,它会确定一个缺陷,这个缺陷由三个关键点定义:- 开始点(
start_index):缺陷开始的地方,即从凸包到凹陷内部的最近点。 - 末尾点(
end_index):缺陷结束的地方,回到凸包上的点。 - 远点(
depth):从开始点到凹陷最深处的距离,存储在Vec4i的第四个元素中,以轮廓点的索引表示距离。
- 开始点(
结果表示
每个 cv::Vec4i 结构包含以下四个整数:
- 开始点在
contour中的索引。 - 末尾点在
contour中的索引。 - 远点在
contour中的索引。 - 缺陷的深度(负值,表示距离的绝对值)。
示例用法
// 假设已从图像中找到轮廓
std::vector<std::vector<cv::Point>> contours;
cv::findContours(image, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);// 计算并存储每个轮廓的凸包缺陷
std::vector<std::vector<cv::Vec4i>> defects;
for (size_t i = 0; i < contours.size(); ++i) {std::vector<cv::Point> hull;cv::convexHull(contours[i], hull, false); // 不翻转顺序cv::convexityDefects(contours[i], hull, defects[i]);
}// 处理每个轮廓的缺陷
for (const auto& defect : defects) {for (const auto& d : defect) {// 处理每个缺陷}
}应用场景
- 物体识别:通过检测物体边缘的凹陷来区分不同形状的物体。
- 异常检测:在质量控制中,检测产品表面的凹痕或缺陷。
- 图像分析:理解复杂形状的几何特征。
注意事项
- 凸包缺陷检测仅适用于凸形物体,对于凹形物体,可能需要其他方法来检测特征。
效果展示
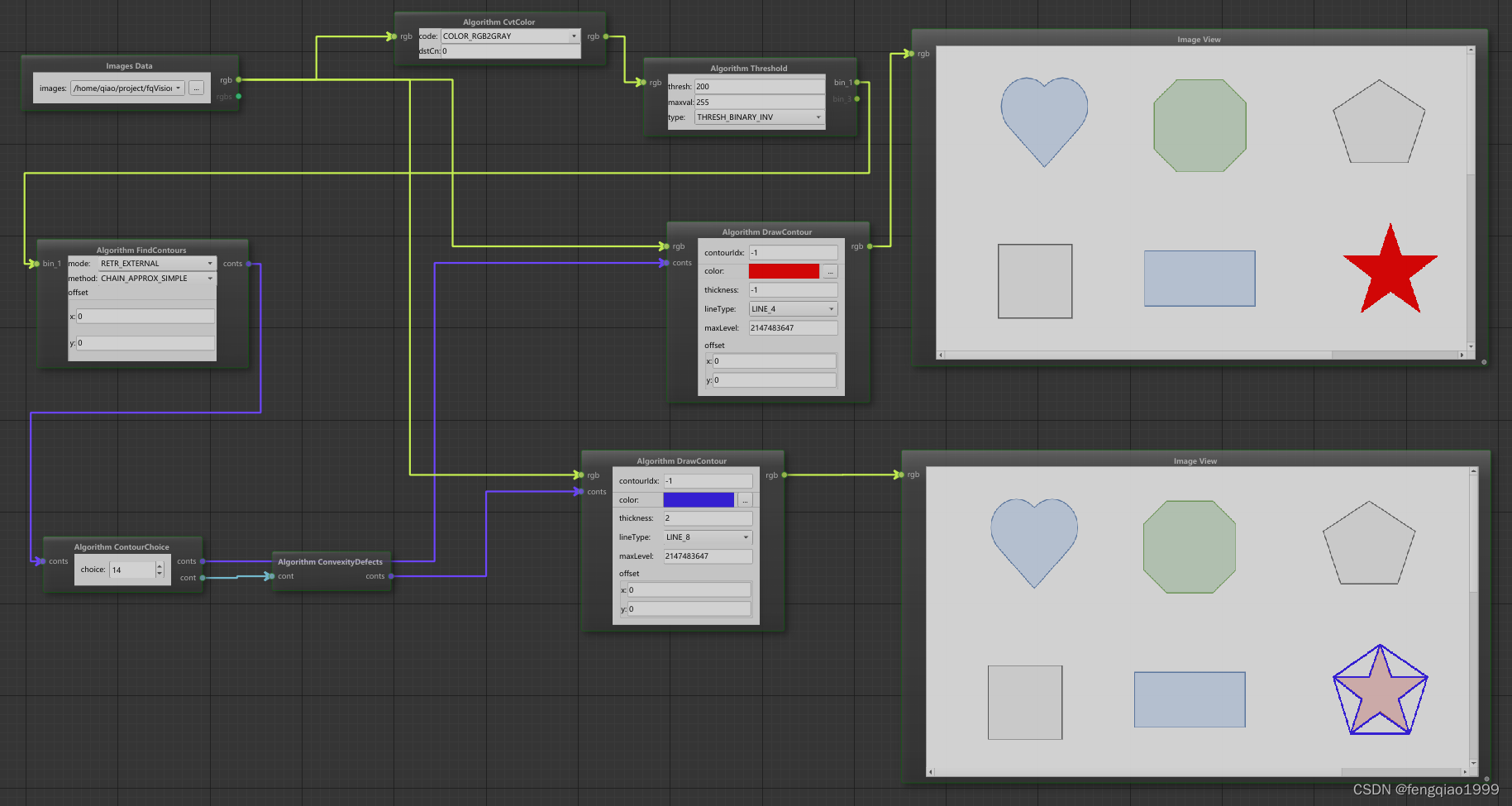
检测五角星的缺陷
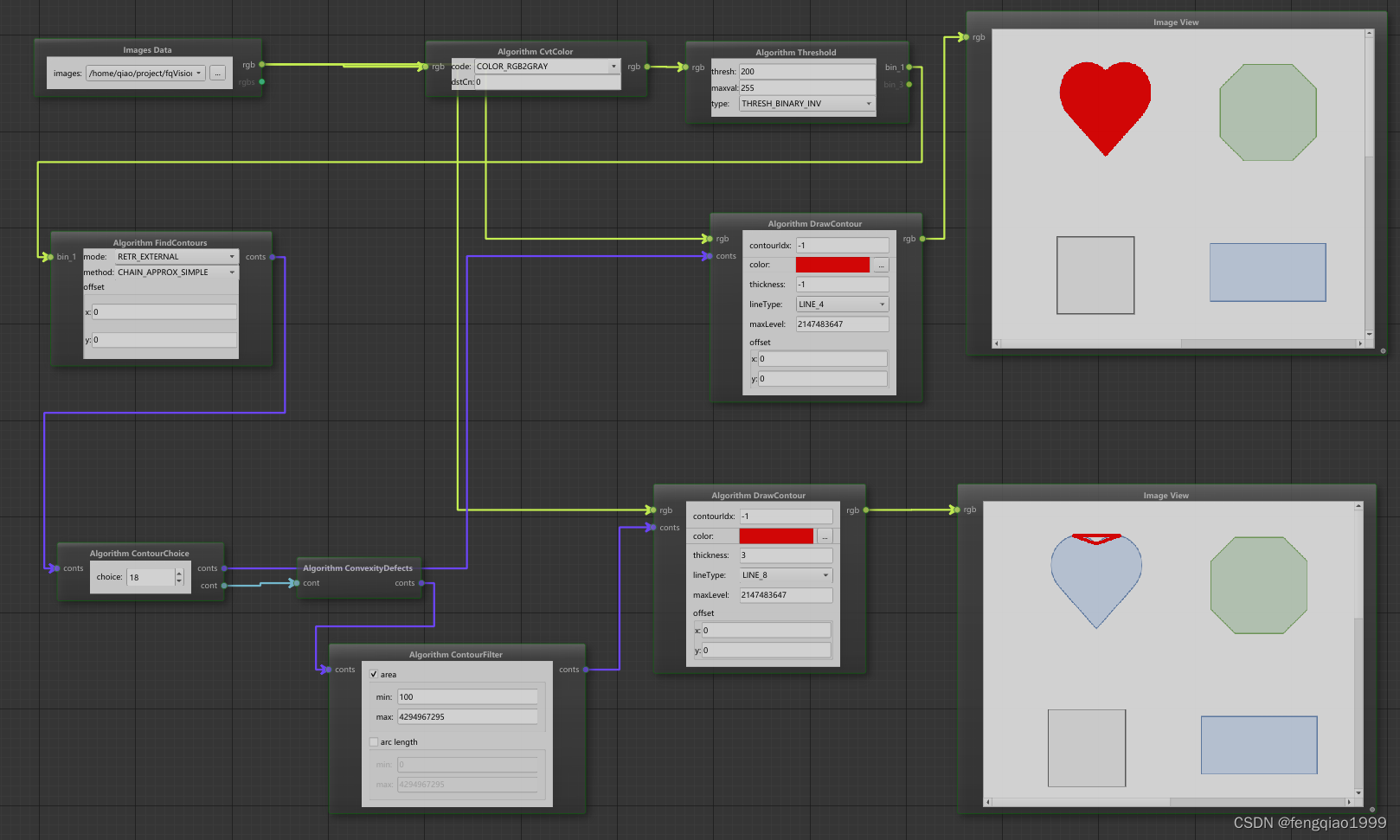
检测心形缺陷