一、旋转矩阵(右手坐标系)
绕x轴旋转
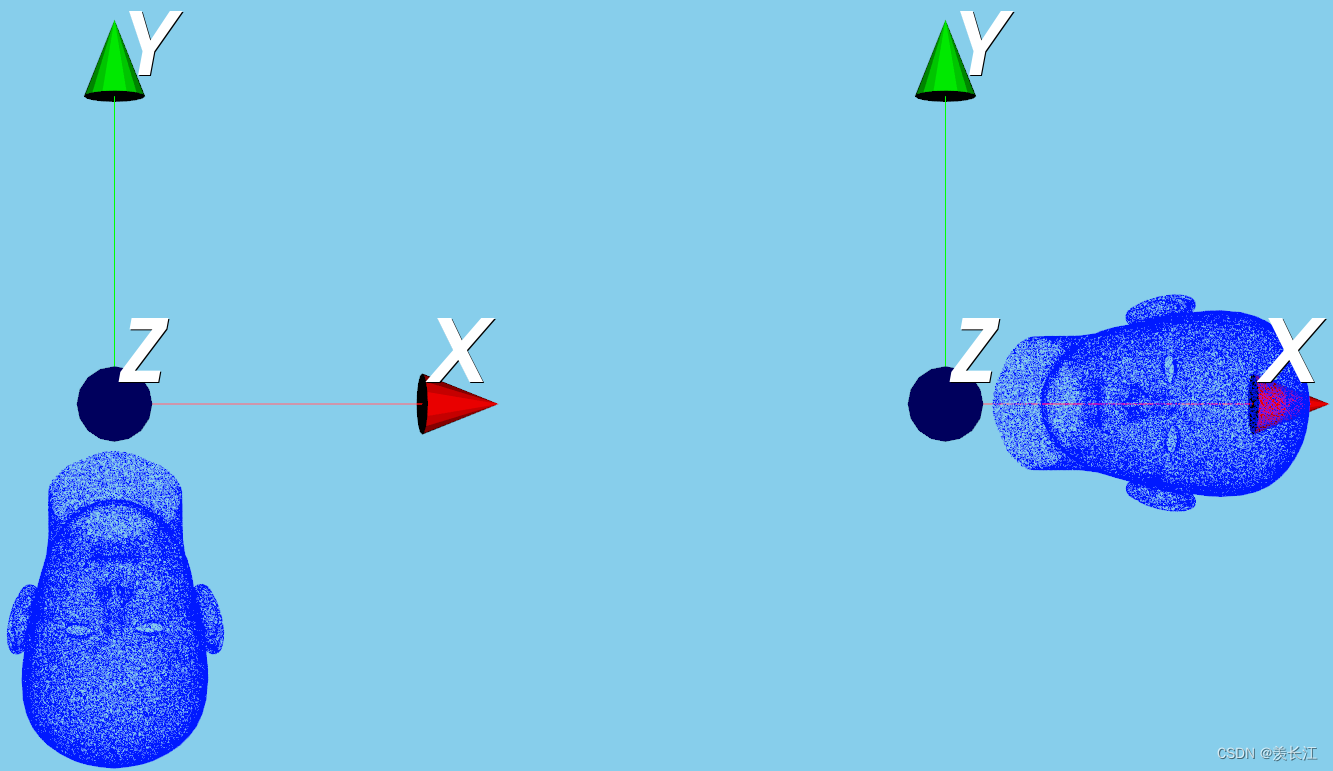
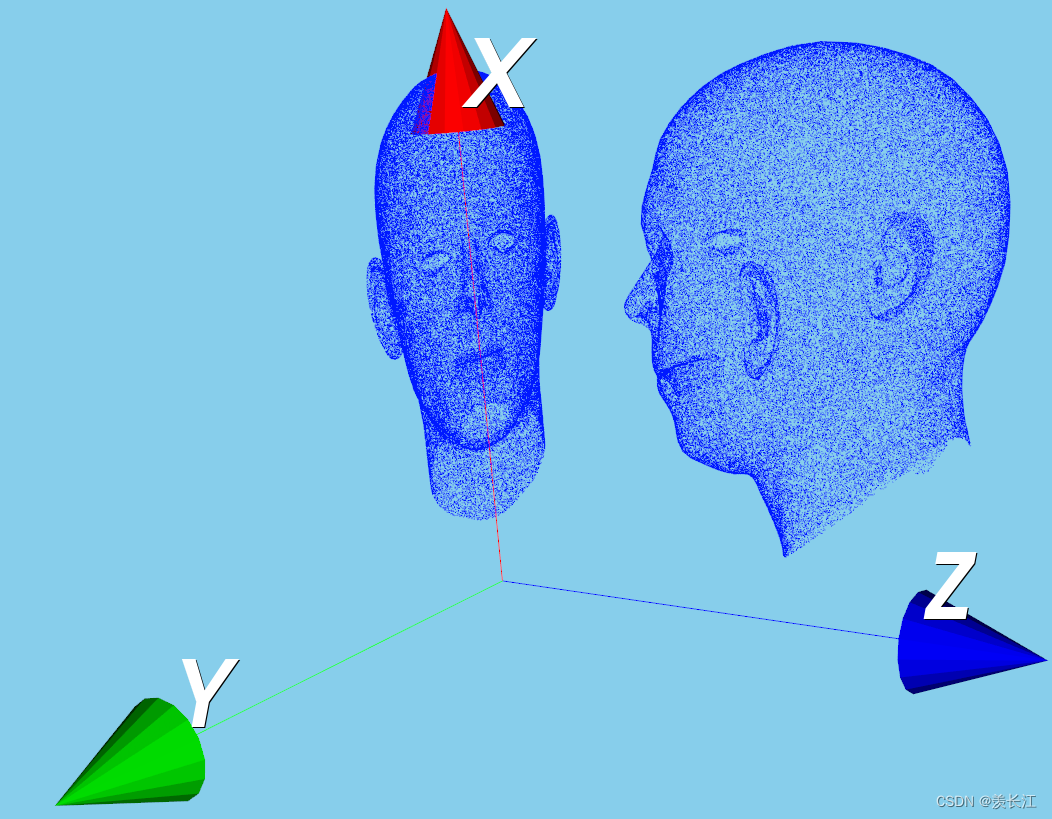
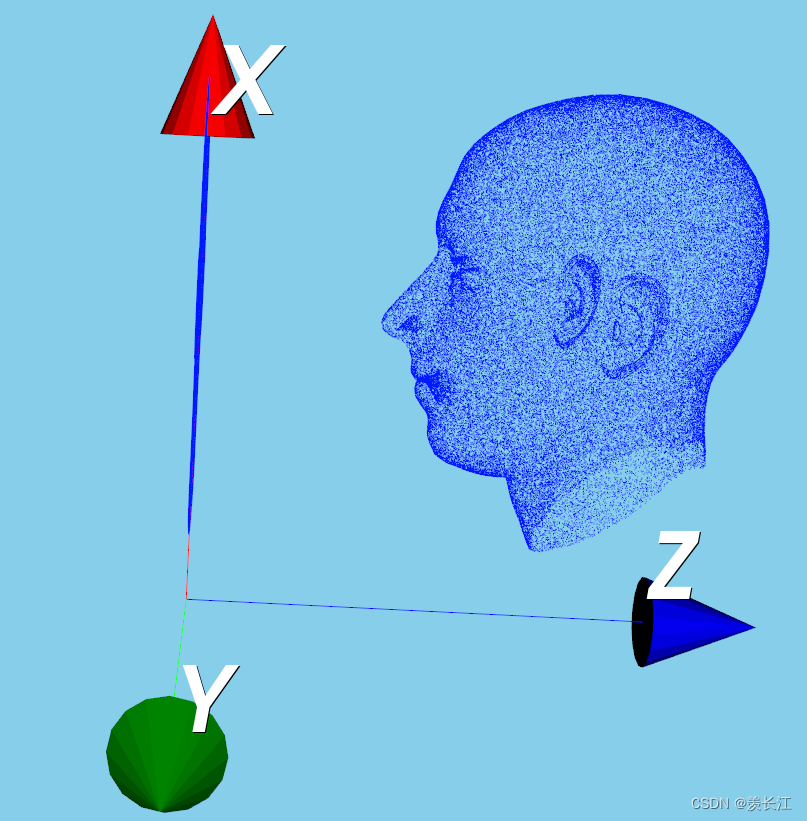
可视化:绕x轴旋转90度
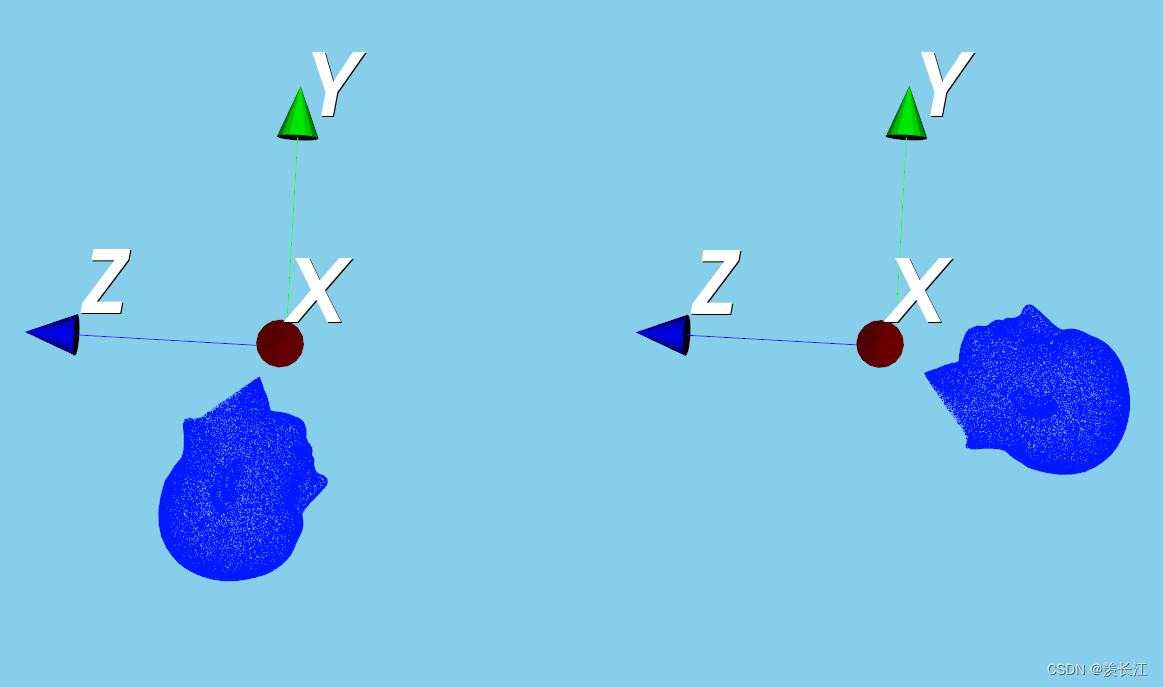
代码:
python">import vtk
import numpy as np
import mathdef pointPolydataCreate(pointCloud):points = vtk.vtkPoints()cells = vtk.vtkCellArray()i = 0for point in pointCloud:points.InsertPoint(i, point[0], point[1], point[2])cells.InsertNextCell(1)cells.InsertCellPoint(i)i += 1PolyData = vtk.vtkPolyData()PolyData.SetPoints(points)PolyData.SetVerts(cells)mapper = vtk.vtkPolyDataMapper()mapper.SetInputData(PolyData)actor = vtk.vtkActor()actor.SetMapper(mapper)actor.GetProperty().SetColor(0.0, 0.1, 1.0)return actordef visiualize(pointCloud, pointCloud2):colors = vtk.vtkNamedColors()actor1 = pointPolydataCreate(pointCloud)actor2 = pointPolydataCreate(pointCloud2)Axes = vtk.vtkAxesActor()# 可视化renderer1 = vtk.vtkRenderer()renderer1.SetViewport(0.0, 0.0, 0.5, 1)renderer1.AddActor(actor1)renderer1.AddActor(Axes)renderer1.SetBackground(colors.GetColor3d('skyblue'))renderer2 = vtk.vtkRenderer()renderer2.SetViewport(0.5, 0.0, 1.0, 1)renderer2.AddActor(actor2)renderer2.AddActor(Axes)renderer2.SetBackground(colors.GetColor3d('skyblue'))renderWindow = vtk.vtkRenderWindow()renderWindow.AddRenderer(renderer1)renderWindow.AddRenderer(renderer2)renderWindow.SetSize(1040, 880)renderWindow.Render()renderWindow.SetWindowName('PointCloud')renderWindowInteractor = vtk.vtkRenderWindowInteractor()renderWindowInteractor.SetRenderWindow(renderWindow)renderWindowInteractor.Initialize()renderWindowInteractor.Start()pointCloud = np.loadtxt("C:/Users/A/Desktop/pointCloudData/model.txt") #读取点云数据angel_x = 90 # 旋转角度
radian = angel_x * np.pi / 180 # 旋转弧度
Rotation_Matrix_1 = [ # 绕x轴三维旋转矩阵 [1, 0, 0],[0, math.cos(radian), -math.sin(radian)],[0, math.sin(radian), math.cos(radian)]]Rotation_Matrix_1 = np.array(Rotation_Matrix_1)p = np.dot(Rotation_Matrix_1, pointCloud.T) # 计算
p = p.T
visiualize(pointCloud, p)绕y轴旋转
旋转矩阵:
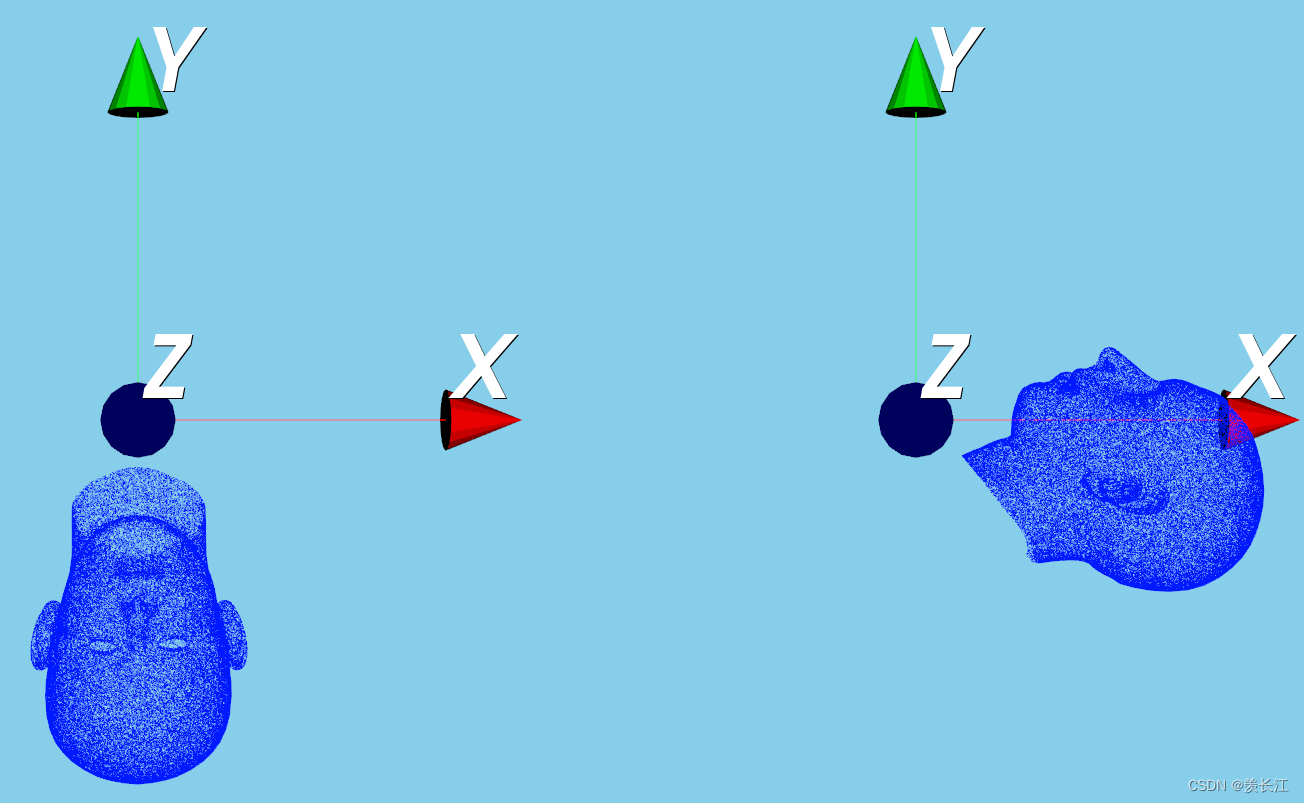
可视化:绕y轴旋转180度
代码:
python">angel_y = 180 # 旋转角度
radian = angel_y * np.pi / 180 # 旋转弧度
Rotation_Matrix_2 = [ # 绕y轴三维旋转矩阵[math.cos(radian), 0, math.sin(radian)],[0, 1, 0],[-math.sin(radian), 0, math.cos(radian)]]Rotation_Matrix_1 = np.array(Rotation_Matrix_1)p = np.dot(Rotation_Matrix_1, pointCloud.T) # 计算
p = p.T
visiualize(pointCloud, p)绕z轴旋转
旋转矩阵:
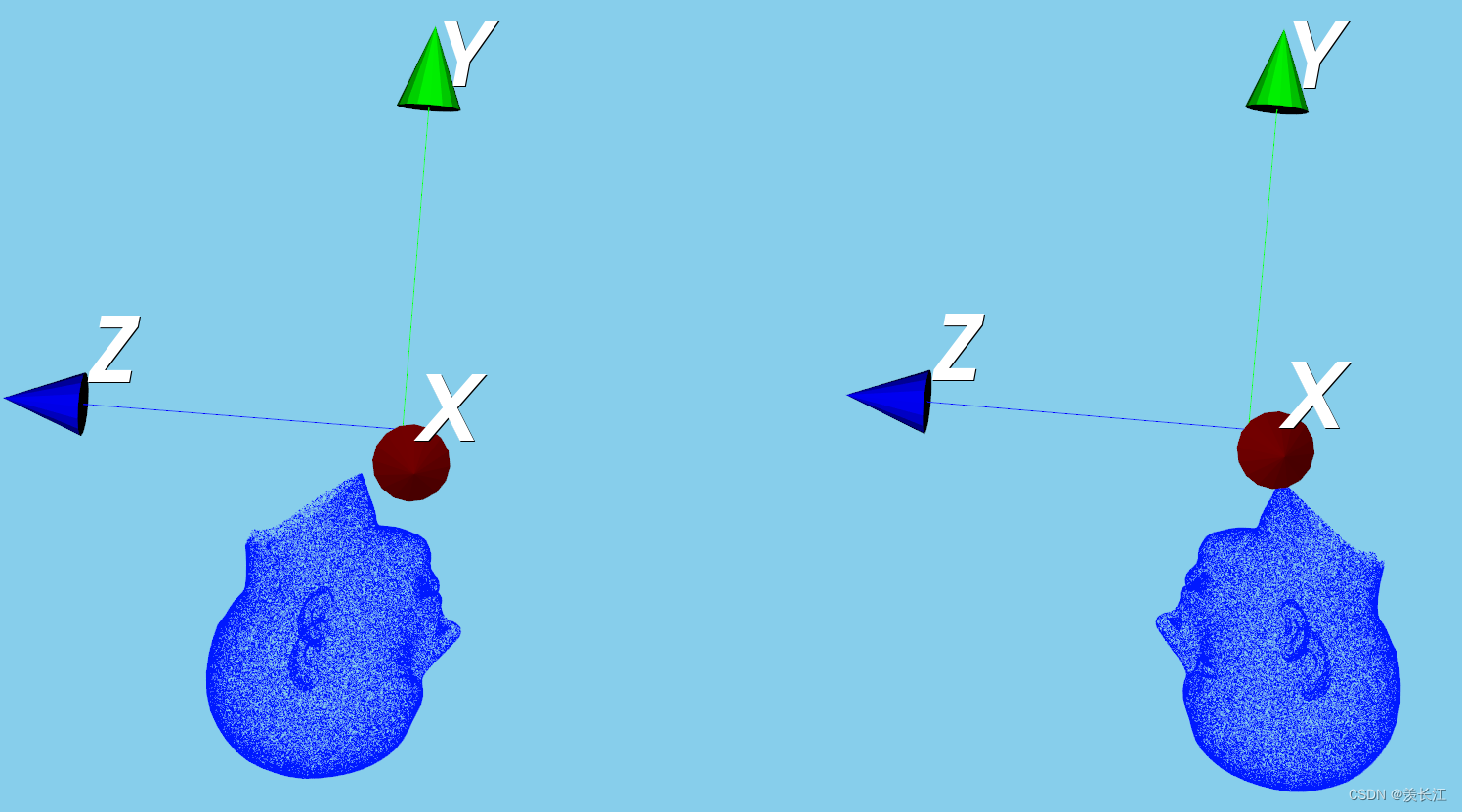
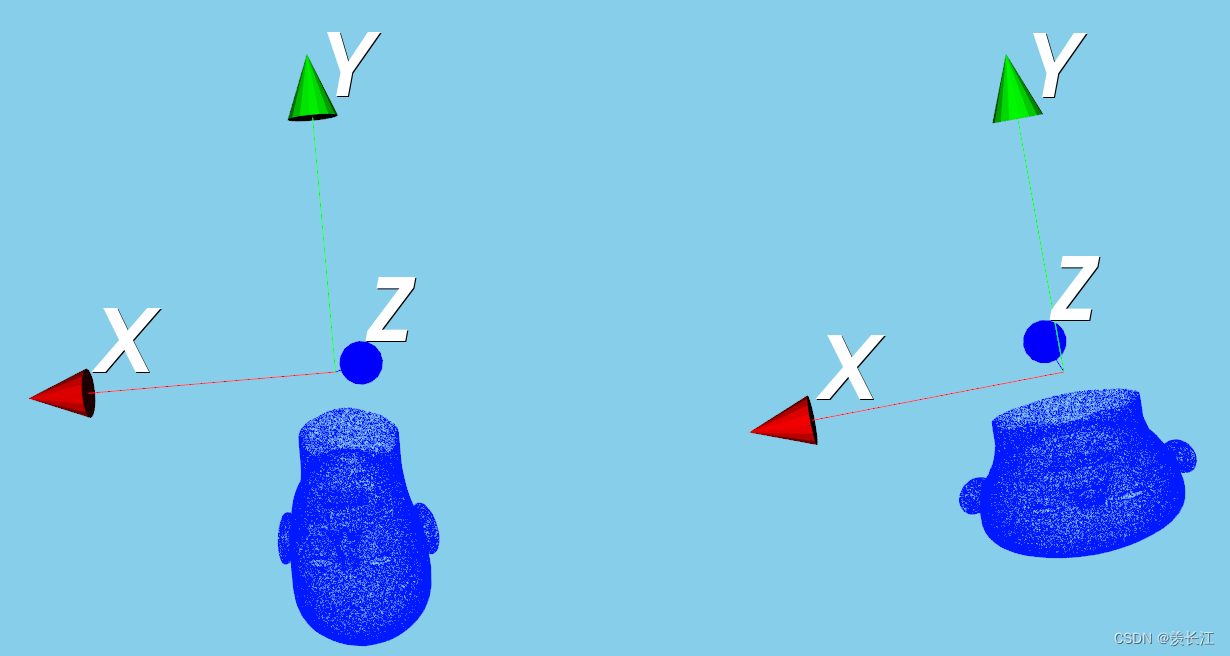
可视化:绕z轴旋转90度
代码:
python">angel_z = 90 # 旋转角度
radian = angel_z * np.pi / 180 # 旋转弧度
Rotation_Matrix_1 = [ # 绕z轴三维旋转矩阵[math.cos(radian), -math.sin(radian), 0],[math.sin(radian), math.cos(radian), 0],[0, 0, 1]]Rotation_Matrix_1 = np.array(Rotation_Matrix_1)p = np.dot(Rotation_Matrix_1, pointCloud.T) # 计算
p = p.T
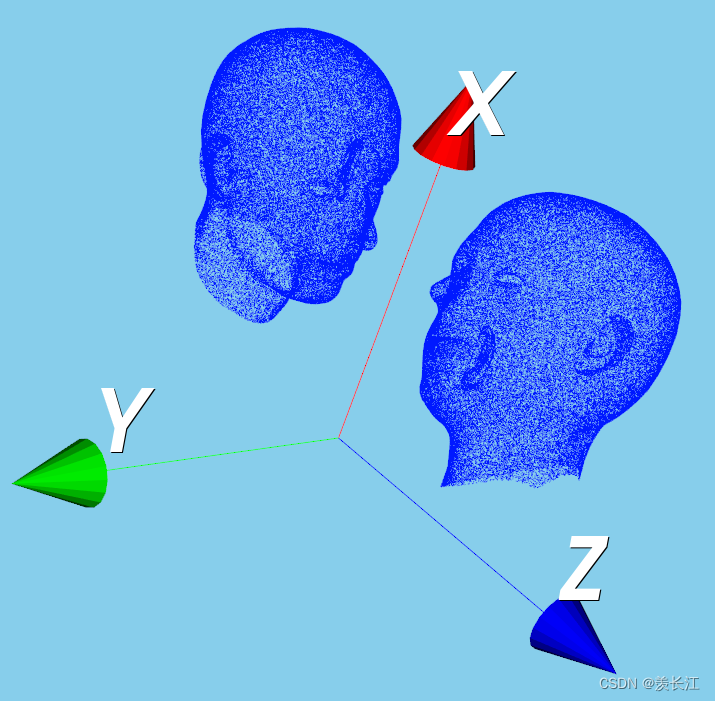
visiualize(pointCloud, p)线绕z轴旋转,再绕x轴旋转:
旋转矩阵: 线绕哪个轴转,xyz矩阵就和哪和轴的旋转矩阵先计算
可视化:先绕z轴旋转90度,再绕x轴旋转90度
代码:
python">angel_z = 90 # 旋转角度
radian = angel_z * np.pi / 180 # 旋转弧度
Rotation_Matrix_z = [ # 绕z轴三维旋转矩阵[math.cos(radian), -math.sin(radian), 0],[math.sin(radian), math.cos(radian), 0],[0, 0, 1]]angel_x = 90 # 旋转角度
radian = angel_x * np.pi / 180 # 旋转弧度
Rotation_Matrix_x = [ # 绕x轴三维旋转矩阵[1, 0, 0],[0, math.cos(radian), -math.sin(radian)],[0, math.sin(radian), math.cos(radian)]]Rotation_Matrix_z = np.array(Rotation_Matrix_z)
Rotation_Matrix_x = np.array(Rotation_Matrix_x)p = np.dot(Rotation_Matrix_z, pointCloud.T) # 计算
p = np.dot(Rotation_Matrix_x, p) # 计算
p = p.T
visiualize(pointCloud, p)二、缩放矩阵
缩放矩阵:
计算过程:三个k是xyz对应的缩放系数
x坐标变为原来的1.5倍,y变为0.7倍,z不变
可视化:
三、镜像矩阵
3D镜像矩阵:
向量n是垂直于镜像平面的单位向量
三维点云对xz平面的镜像:
①首先,确定一个垂直于xz平面的单位向量 n=[0, 1, 0]
②将该单位向量带入上述3D镜像矩阵
可视化:
代码:
python">import vtk
import numpy as np
import mathdef pointPolydataCreate(pointCloud):points = vtk.vtkPoints()cells = vtk.vtkCellArray()i = 0for point in pointCloud:points.InsertPoint(i, point[0], point[1], point[2])cells.InsertNextCell(1)cells.InsertCellPoint(i)i += 1PolyData = vtk.vtkPolyData()PolyData.SetPoints(points)PolyData.SetVerts(cells)mapper = vtk.vtkPolyDataMapper()mapper.SetInputData(PolyData)actor = vtk.vtkActor()actor.SetMapper(mapper)actor.GetProperty().SetColor(0.0, 0.1, 1.0)return actordef visiualize(pointCloud, pointCloud2):colors = vtk.vtkNamedColors()actor1 = pointPolydataCreate(pointCloud)actor2 = pointPolydataCreate(pointCloud2)Axes = vtk.vtkAxesActor()# 可视化renderer1 = vtk.vtkRenderer()renderer1.SetViewport(0.0, 0.0, 0.5, 1)renderer1.AddActor(actor1)renderer1.AddActor(Axes)renderer1.SetBackground(colors.GetColor3d('skyblue'))renderer2 = vtk.vtkRenderer()renderer2.SetViewport(0.5, 0.0, 1.0, 1)renderer2.AddActor(actor1)renderer2.AddActor(actor2)renderer2.AddActor(Axes)renderer2.SetBackground(colors.GetColor3d('skyblue'))renderWindow = vtk.vtkRenderWindow()renderWindow.AddRenderer(renderer1)renderWindow.AddRenderer(renderer2)renderWindow.SetSize(1040, 880)renderWindow.Render()renderWindow.SetWindowName('PointCloud')renderWindowInteractor = vtk.vtkRenderWindowInteractor()renderWindowInteractor.SetRenderWindow(renderWindow)renderWindowInteractor.Initialize()renderWindowInteractor.Start()pointCloud = np.loadtxt("C:/Users/A/Desktop/pointCloudData/model.txt") #读取点云数据nx = 0
ny = 0
nz = 1
n = [nx, ny, nz] # 垂直xy平面的单位向量
# 镜像矩阵
Mirror_Matrix = [[1-2*nx**2, -2*nx*ny, -2*nx*nz],[-2*nx*ny, 1-2*ny**2, -2*ny*nz],[-2*nx*nz, -2*ny*nz, 1-2*nz**2]]Mirror_Matrix = np.array(Mirror_Matrix)p = np.dot(Mirror_Matrix, pointCloud.T) # 计算
p = p.T
visiualize(pointCloud, p)四、错切矩阵
沿xy平面错切(z不变)
矩阵 计算过程
沿xz平面错切(y不变)
矩阵 计算过程
沿yz平面错切(x不变)
矩阵 计算过程
可视化:沿yz平面错切

代码:
python">pointCloud = np.loadtxt("C:/Users/A/Desktop/pointCloudData/model.txt") #读取点云数据s = 0.3
t = 0.3
# 沿yz平面错切矩阵
Shear_Matrix = [[1, 0, 0],[s, 1, 0],[t, 0, 1]]Shear_Matrix = np.array(Shear_Matrix)p = np.dot(Shear_Matrix, pointCloud.T) # 计算
p = p.T
visiualize(pointCloud, p)五、正交投影
正交投影矩阵(投影到三维空间任意平面):
向量n是垂直于投影平面的单位向量
可视化:点云在xy平面上的正交投影
六、平移矩阵
最右边一列是xyz的位移量
计算过程:
线性变换+平移:
增加的平移对原来的线性变换没影响,可以将前面介绍的变换矩阵和平移结合
例如:沿xy平面错切+平移