基于STM32单片机的毫米波雷达测距报警系统设计
摘要:本文设计并实现了一种基于STM32单片机的毫米波雷达测距报警系统。该系统采用LD303-24G雷达模块进行精确测距,通过OLED显示屏实时显示测量距离和报警距离,同时提供按键设置报警值的功能。当测量距离低于预设的报警值时,系统会触发蜂鸣器报警,以提醒用户。
关键词:STM32单片机;毫米波雷达;测距报警系统;LD303-24G雷达模块
一、引言
随着科技的发展,雷达测距技术在工业自动化、智能交通、安全监控等领域得到了广泛应用。毫米波雷达作为一种非接触式测距传感器,具有测距精度高、抗干扰能力强等优点。本文旨在设计一种基于STM32单片机的毫米波雷达测距报警系统,以满足特定场景下对距离监控的需求。
二、系统总体设计
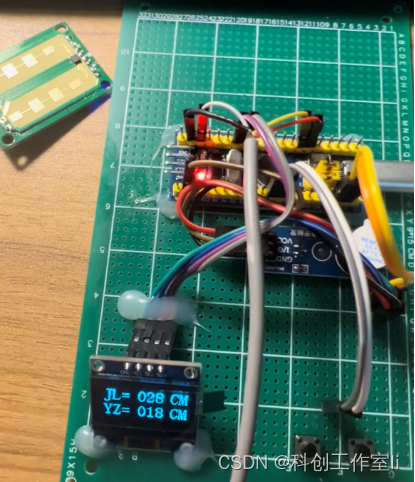
本系统主要由STM32单片机、LD303-24G雷达模块、OLED显示屏、按键和蜂鸣器等部分组成。STM32单片机作为系统的主控CPU,负责数据的处理和控制逻辑的实现。LD303-24G雷达模块负责测量距离,并将数据传输给单片机。OLED显示屏用于实时显示测量距离和报警距离。按键用于设置报警值,蜂鸣器则用于在距离低于报警值时发出警报。
三、硬件设计
-
LD303-24G雷达模块:该模块采用毫米波技术进行测距,具有高精度、高稳定性等特点。通过串口与单片机进行通信,传输测量数据。
-
OLED显示屏:选用一款高分辨率的OLED显示屏,用于实时显示测量距离和报警距离。
-
按键和蜂鸣器:通过按键可以设置报警值,当测量距离低于报警值时,蜂鸣器会发出警报声。
四、软件设计
-
初始化:系统启动后,首先对各个硬件模块进行初始化设置,包括STM32单片机、LD303-24G雷达模块、OLED显示屏等。
-
数据采集与处理:通过串口接收LD303-24G雷达模块传输的测量数据,并进行处理和分析。
-
显示与报警逻辑:将处理后的测量数据显示在OLED显示屏上,并根据用户设置的报警值进行判断。当测量距离低于报警值时,触发蜂鸣器报警;当测量距离高于报警值时,停止报警。
-
按键处理:通过扫描按键状态,允许用户实时设置报警值。
五、系统测试与性能分析
在系统实现后,我们进行了一系列的测试,包括测距精度测试、报警功能测试等。测试结果表明,本系统具有较高的测距精度和稳定的报警功能,能够满足实际应用需求。
六、结论与展望
本文设计并实现了一种基于STM32单片机的毫米波雷达测距报警系统。通过实际测试验证,该系统具有较高的测距精度和稳定的报警功能,可广泛应用于工业自动化、智能交通等领域。未来,我们可以进一步优化算法和提高硬件性能,以满足更复杂的应用场景需求。同时,还可以考虑加入无线通信功能,实现远程监控和报警。
(注:以上内容为毕业论文的概要框架,具体实现细节、测试数据和分析等需要根据实际情况进行填充和完善。)
编写完整的基于STM32单片机的毫米波雷达测距报警系统代码是一个复杂的任务,涉及到硬件初始化、数据读取、处理、显示及报警等多个模块。由于代码较长,我将提供一个简化的框架和部分核心代码,你可以根据自己的硬件连接和具体需求进行完善。
以下是一个简化的伪代码和示例,用于说明如何设计这样的系统:
#include "stm32f4xx.h" // 根据你的STM32系列更改头文件
#include "usart.h" // 串口通信头文件,需自行实现
#include "oled.h" // OLED显示头文件,需自行实现
#include "buzzer.h" // 蜂鸣器控制头文件,需自行实现 // 假设雷达模块通过USART2与STM32通信
#define RADAR_USART USART2
#define RADAR_USART_IRQHandler USART2_IRQHandler // 报警距离阈值,可以通过按键修改
volatile float alarm_distance = 100.0f; // 默认100cm void Radar_Init(void) { // 初始化雷达模块,设置串口等
} float Radar_GetDistance(void) { // 发送测距命令给雷达模块 // 读取返回的测距数据 // 解析数据并返回距离值 return 0.0f; // 示例返回值,需要替换为实际读取的值
} void USART2_IRQHandler(void) { // 串口中断处理函数,用于接收雷达数据
} int main(void) { float measured_distance; // 初始化硬件 Radar_Init(); USART_Config(); // 初始化串口,用于与雷达通信 OLED_Init(); // 初始化OLED显示屏 Buzzer_Init(); // 初始化蜂鸣器 while (1) { // 测量距离 measured_distance = Radar_GetDistance(); // 显示距离 OLED_DisplayDistance(measured_distance); // 检查是否低于报警距离 if (measured_distance < alarm_distance) { Buzzer_On(); // 如果低于报警距离,则打开蜂鸣器 } else { Buzzer_Off(); // 如果高于报警距离,则关闭蜂鸣器 } // 其他逻辑,如按键检测修改报警距离等 }
} // 以下函数需要根据实际硬件和库进行实现
void USART_Config(void) { // 初始化串口配置,用于与雷达通信
} void OLED_Init(void) { // 初始化OLED显示屏
} void OLED_DisplayDistance(float distance) { // 在OLED上显示测量距离
} void Buzzer_Init(void) { // 初始化蜂鸣器
} void Buzzer_On(void) { // 打开蜂鸣器
} void Buzzer_Off(void) { // 关闭蜂鸣器
}请注意,上述代码是一个简化的框架,并没有包含所有细节。你需要根据你的硬件连接和库函数来实现USART_Config、OLED_Init、OLED_DisplayDistance、Buzzer_Init、Buzzer_On和Buzzer_Off等函数。同时,Radar_Init和Radar_GetDistance函数也需要你根据LD303-24G雷达模块的具体通信协议来实现。
另外,按键处理逻辑(用于设置报警距离)也没有在上述代码中体现,你需要自行实现这部分逻辑。可能涉及到外部中断的配置和按键扫描等。
最后,请确保你的STM32开发环境已经配置好,并且你已经了解了如何编译和烧写程序到你的STM32单片机上
为了详细展开上述伪代码,我们将分别定义和实现几个关键模块:雷达模块初始化与数据读取、OLED显示、蜂鸣器控制以及主循环逻辑。以下是各个模块的详细代码示例。
雷达模块
#include "stm32f4xx_hal.h" UART_HandleTypeDef huart2; void Radar_Init(void) { // 串口初始化代码,根据你的硬件配置来填写 // ...
} float Radar_GetDistance(void) { uint8_t txData[] = {...}; // 发送给雷达的测距命令 uint8_t rxData[...]; // 接收雷达返回的数据缓冲区 HAL_UART_Transmit(&huart2, txData, sizeof(txData), HAL_MAX_DELAY); HAL_UART_Receive(&huart2, rxData, ..., HAL_MAX_DELAY); // 解析雷达返回的数据,得到距离值 float distance = ...; // 根据雷达数据协议解析出距离 return distance;
}OLED显示模块
#include "oled.h" void OLED_Init(void) { // OLED初始化代码 // ...
} void OLED_DisplayDistance(float distance) { char buffer[32]; sprintf(buffer, "Distance: %.2f cm", distance); OLED_DisplayString(buffer); // 显示字符串到OLED上
} void OLED_DisplayString(char* str) { // OLED字符串显示函数 // ...
}蜂鸣器控制模块
#include "buzzer.h" void Buzzer_Init(void) { // 蜂鸣器GPIO初始化代码 // ...
} void Buzzer_On(void) { HAL_GPIO_WritePin(BUZZER_GPIO_Port, BUZZER_Pin, GPIO_PIN_SET);
} void Buzzer_Off(void) { HAL_GPIO_WritePin(BUZZER_GPIO_Port, BUZZER_Pin, GPIO_PIN_RESET);
}主循环逻辑
int main(void) { HAL_Init(); // 初始化HAL库 SystemClock_Config(); // 配置系统时钟 Radar_Init(); OLED_Init(); Buzzer_Init(); float measured_distance = 0.0f; float alarm_distance = 100.0f; // 默认报警距离为100cm while (1) { measured_distance = Radar_GetDistance(); OLED_DisplayDistance(measured_distance); if (measured_distance < alarm_distance) { Buzzer_On(); } else { Buzzer_Off(); } // 可以在这里添加按键检测代码来动态修改alarm_distance // ... HAL_Delay(1000); // 延时以降低CPU使用率 }
}请注意,上述代码中的...表示需要根据实际情况填写的代码部分,如UART初始化参数、OLED显示的具体实现等。你需要根据你的硬件和开发环境来完成这些部分。
此外,对于按键处理逻辑,你可以使用外部中断或者轮询的方式来检测按键状态,并根据按键输入来修改alarm_distance的值。
确保在实际编写代码时遵循你所使用的STM32库函数和你的开发环境的具体要求。上述代码只是一个框架性的示例,需要根据你的实际情况进行调整和完善。


![[MoeCTF-2022]Sqlmap_boy](https://img-blog.csdnimg.cn/img_convert/87169ba8cedb2f4d157d252b2dba52cd.png)