研究背景
- 研究问题:如何准确预测旋转机械(如轴承)的剩余使用寿命(RUL),这对于设备可靠性和减少工业系统中的意外故障至关重要。
- 研究难点:该问题的研究难点包括:训练和测试阶段数据分布不一致、长期RUL预测的泛化能力有限。
- 相关工作:现有工作主要包括基于模型的方法、数据驱动的方法和混合方法。基于模型的方法依赖于历史数据构建数学或物理模型,但难以准确开发。混合方法结合了数据驱动和模型驱动的方法,但仍需要深入的失效机制分析和广泛的先验知识。数据驱动的方法依赖于监测数据,具有自动学习和提取模式的优势,但在处理数据分布变化和长期预测方面存在局限性。
LM4RUL框架【用于基于预训练的大语言模型(LLM)进行轴承RUL预测】在FEMTO数据集上六个跨条件RUL预测任务中,LM4RUL在所有任务中均表现最佳。与DDAN方法相比,在Task 3中,LM4RUL的性能提高了至少16.22%。
在XJTU-SY数据集上三个跨条件RUL预测任务中,LM4RUL也取得了最佳预测性能。与DDAN方法相比,其预测性能平均提高了36.8%。
如何利用LM用于解决轴承RUL预测问题

LM4RUL框架,用于解决轴承RUL预测问题。具体来说,
- 本地尺度感知表示(LSPR)组件:
本地尺度感知表示(LSPR)组件通过对振动数据进行分块处理,提取时间频率特征,并通过补丁操作将局部退化信息封装成序列输入到预训练的LLM中。具体步骤如下:- FPT检测:首先,使用FPT(First Point of Significant Degradation)检测方法确定轴承开始显著退化的时间点,以界定数据范围。
- 特征提取:使用短时傅里叶变换(STFT)从振动信号中提取时频域特征,公式如下:
X ( t , f ) = ∫ − ∞ + ∞ x ( τ ) w ( τ − t ) e − i 2 π f τ d τ X(t, f)=\int_{-\infty}^{+\infty} x(\tau) w(\tau-t) e^{-i 2\pi f\tau} d\tau X(t,f)=∫−∞+∞x(τ)w(τ−t)e−i2πfτdτ
其中, x ( t ) x(t) x(t) 是信号, w ( τ − t ) w(\tau-t) w(τ−t) 是窗口函数, f f f 表示频率。 - 补丁操作:将提取的时频特征图按固定长度窗口分割成多个子序列,并将每个子序列转换为时间频率特征图。然后将所有特征图沿时间方向拼接,形成退化特征图。接着,将这些特征图重新组织成大小为 D × N × P D \times N \times P D×N×P 的矩阵,其中 D D D 是特征维度, N N N 是时间维度, P P P 是补丁大小。通过补丁操作,模型能够聚焦于局部尺度的退化特征,并将其与全局退化趋势关联起来,从而捕捉更长的历史序列中的退化信息。
通过这些步骤,LSPR组件能够有效地将局部退化信息转化为适合LLM处理的序列,增强了LLM在捕捉长时间窗口内的退化趋势和关键退化模式方面的能力,从而提高了轴承RUL预测的准确性。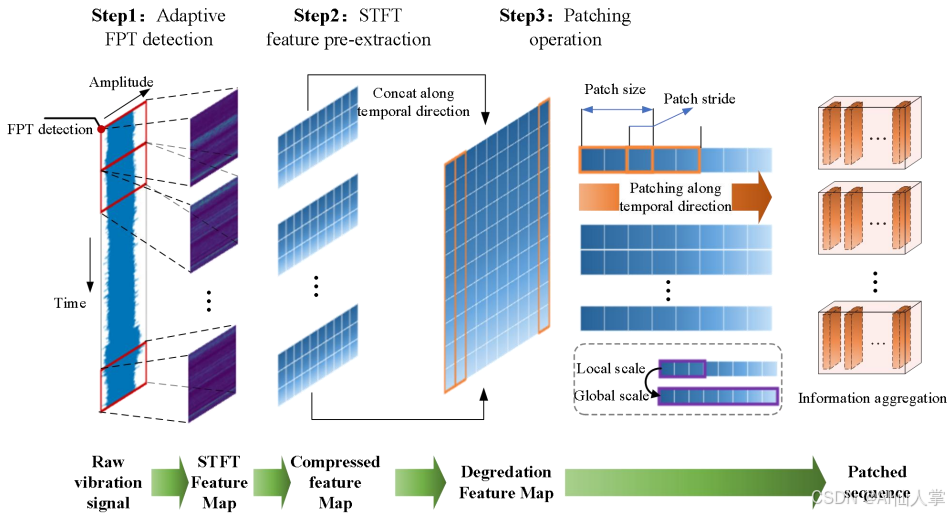
-
混合嵌入学习(FPLM-HEL)组件:FPLM-HEL组件选择性冻结和微调预训练模型的层,保留预测知识并有效建模退化过程中的复杂非线性关系。FPLM-HEL采用三重嵌入方法,增强模型提取和学习抽象退化特征的能力。具体设计如下:
- 输入嵌入模块:将补丁后的退化特征序列输入到输入嵌入模块,提取局部敏感特征和全局退化特征,并结合绝对位置信息和相对时间信息进行编码和嵌入。
- FPLM模块:FPLM模块包含多个堆叠的FPLM块,每个块包含多头自注意力机制和前馈神经网络。在微调阶段,只更新部分层的参数,保留预训练的多头注意力和前馈网络的通用预测知识。具体公式如下:
x ^ j ( i ) = γ j × ( x j ( i ) − E [ x t:L ( i ) ] Var [ x t:L ( i ) ] + ϵ ) + β j \hat{x}_{j}^{(i)}=\gamma_{j}\times\left(\frac{x_{j}^{(i)}-E\left[x_{\text{t:L}}^{(i)}\right]}{\sqrt{\operatorname{Var}\left[x_{\text{t:L}}^{(i)}\right]+\epsilon}}\right)+\beta_{j} x^j(i)=γj×





