- 12_PL读写PS端DDR数据.mp4
打开AXI HP0 interface
- 参照HELLO WORLD新建Block Design,打开AXI HP0 interface,配置PL Fabric Clocks 时钟


添加转换模块


添加复位

添加时钟并进行连接


- 配置端口属性


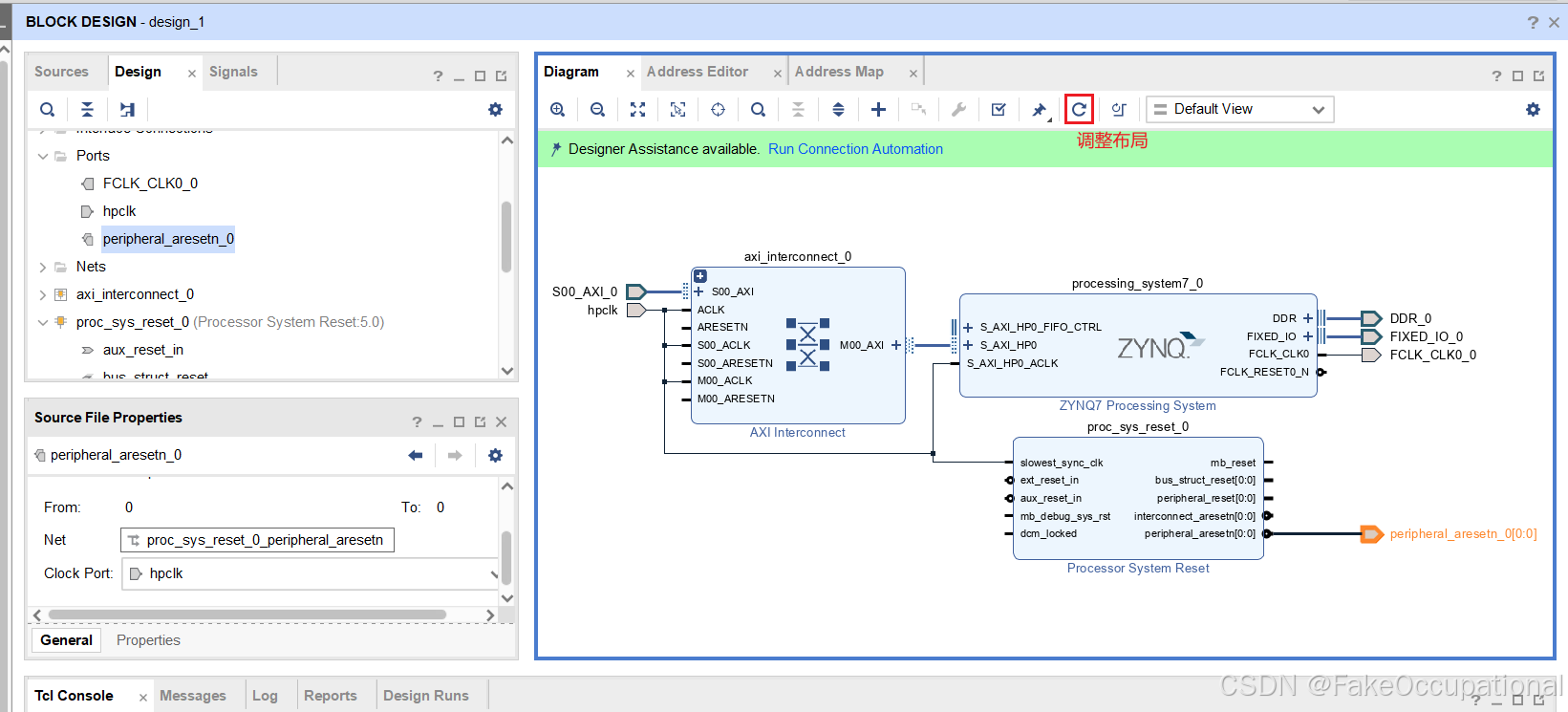
- 连接复位后保存:

分配地址


代码
-
https://github.com/alinxalinx/AX7020_2023.1/blob/master/course_s2_vitis/12_pl_read_write_ps_ddr/Vivado/auto_create_project/src/design/aq_axi_master.v
-
https://gitee.com/wnagds/pl_read_write_ps_ddr/tree/master/pl_read_write_ps_ddr.srcs/sources_1注释掉top中的fifo_16x64和aq_axi_master
-
外部master模块通过AXI FULL接口直接读取DDR数据
-
【AXI-Master-Slave总结】
// https://cloud.tencent.com/developer/article/1532836
module aq_axi_master(// Reset, Clockinput ARESETN,input ACLK,// Master 写地址通道output [0:0] M_AXI_AWID,output [31:0] M_AXI_AWADDR,output [7:0] M_AXI_AWLEN, // Burst Length:0-255output [2:0] M_AXI_AWSIZE, // Burst Size:Fixed 2'b011output [1:0] M_AXI_AWBURST, // Burst Type:Fixed 2'b01(Incremental Burst)output M_AXI_AWLOCK, // Lock: Fixed2'b00output [3:0] M_AXI_AWCACHE, // Cache: Fiex2'b0011output [2:0] M_AXI_AWPROT, // Protect: Fixed2'b000output [3:0] M_AXI_AWQOS, // QoS: Fixed2'b0000output [0:0] M_AXI_AWUSER, // User: Fixed32'd0output M_AXI_AWVALID,input M_AXI_AWREADY,// Master 写数据通道output [63:0] M_AXI_WDATA,output [7:0] M_AXI_WSTRB,output M_AXI_WLAST,output [0:0] M_AXI_WUSER,output M_AXI_WVALID,input M_AXI_WREADY,// Master 写响应通道input [0:0] M_AXI_BID,input [1:0] M_AXI_BRESP,input [0:0] M_AXI_BUSER,input M_AXI_BVALID,output M_AXI_BREADY,// Master 读地址通道output [0:0] M_AXI_ARID,output [31:0] M_AXI_ARADDR,output [7:0] M_AXI_ARLEN,output [2:0] M_AXI_ARSIZE,output [1:0] M_AXI_ARBURST,output [1:0] M_AXI_ARLOCK,output [3:0] M_AXI_ARCACHE,output [2:0] M_AXI_ARPROT,output [3:0] M_AXI_ARQOS,output [0:0] M_AXI_ARUSER,output M_AXI_ARVALID,input M_AXI_ARREADY,// Master 读数据通道input [0:0] M_AXI_RID,input [63:0] M_AXI_RDATA,input [1:0] M_AXI_RRESP,input M_AXI_RLAST,input [0:0] M_AXI_RUSER,input M_AXI_RVALID,output M_AXI_RREADY,// Local Businput MASTER_RST,input WR_START,input [31:0] WR_ADRS,input [31:0] WR_LEN,output WR_READY,output WR_FIFO_RE,input WR_FIFO_EMPTY,input WR_FIFO_AEMPTY,input [63:0] WR_FIFO_DATA,output WR_DONE,input RD_START,input [31:0] RD_ADRS,input [31:0] RD_LEN,output RD_READY,output RD_FIFO_WE,input RD_FIFO_FULL,input RD_FIFO_AFULL,output [63:0] RD_FIFO_DATA,output RD_DONE,output [31:0] DEBUG);localparam S_WR_IDLE = 3'd0;localparam S_WA_WAIT = 3'd1;localparam S_WA_START = 3'd2;localparam S_WD_WAIT = 3'd3;localparam S_WD_PROC = 3'd4;localparam S_WR_WAIT = 3'd5;localparam S_WR_DONE = 3'd6;reg [2:0] wr_state;reg [31:0] reg_wr_adrs;reg [31:0] reg_wr_len;reg reg_awvalid, reg_wvalid, reg_w_last;reg [7:0] reg_w_len;reg [7:0] reg_w_stb;reg [1:0] reg_wr_status;reg [3:0] reg_w_count, reg_r_count;reg [7:0] rd_chkdata, wr_chkdata;reg [1:0] resp;reg rd_first_data;reg rd_fifo_enable;reg[31:0] rd_fifo_cnt;assign WR_DONE =(wr_state == S_WR_DONE);assignWR_FIFO_RE = rd_first_data |(reg_wvalid & ~WR_FIFO_EMPTY & M_AXI_WREADY & rd_fifo_enable);always @(posedgeACLK or negedge ARESETN)beginif(!ARESETN)rd_fifo_cnt <= 32'd0;else if(WR_FIFO_RE)rd_fifo_cnt <= rd_fifo_cnt +32'd1;else if(wr_state == S_WR_IDLE)rd_fifo_cnt <= 32'd0;endalways @(posedgeACLK or negedge ARESETN)beginif(!ARESETN)rd_fifo_enable <= 1'b0;else if(wr_state == S_WR_IDLE &&WR_START)rd_fifo_enable <= 1'b1;else if(WR_FIFO_RE && (rd_fifo_cnt== RD_LEN[31:3] - 32'd1) )rd_fifo_enable <= 1'b0; end// Write Statealways @(posedge ACLK or negedge ARESETN)beginif(!ARESETN) beginwr_state <= S_WR_IDLE;reg_wr_adrs[31:0] <= 32'd0;reg_wr_len[31:0] <= 32'd0;reg_awvalid <= 1'b0;reg_wvalid <= 1'b0;reg_w_last <= 1'b0;reg_w_len[7:0] <= 8'd0;reg_w_stb[7:0] <= 8'd0;reg_wr_status[1:0] <= 2'd0;reg_w_count[3:0] <= 4'd0;reg_r_count[3:0] <= 4'd0;wr_chkdata <= 8'd0;rd_chkdata <= 8'd0;resp <= 2'd0;rd_first_data <= 1'b0;end else beginif(MASTER_RST) beginwr_state <= S_WR_IDLE;end else begincase(wr_state)S_WR_IDLE: beginif(WR_START) begin //外部开始写地址wr_state <= S_WA_WAIT;reg_wr_adrs[31:0] <=WR_ADRS[31:0];//写地址reg_wr_len[31:0] <= WR_LEN[31:0] -32'd1;//写长度rd_first_data <= 1'b1;endreg_awvalid <= 1'b0;reg_wvalid <= 1'b0;reg_w_last <= 1'b0;reg_w_len[7:0] <= 8'd0;reg_w_stb[7:0] <= 8'd0;reg_wr_status[1:0] <= 2'd0;end//写地址等待S_WA_WAIT: begin//外部FIFO不空或者长度为0则开始写地址if(!WR_FIFO_AEMPTY |(reg_wr_len[31:11] == 21'd0)) beginwr_state <= S_WA_START;endrd_first_data <= 1'b0;end//写地址开始S_WA_START: beginwr_state <= S_WD_WAIT;//写数据等待reg_awvalid <= 1'b1;//写长度减一reg_wr_len[31:11] <= reg_wr_len[31:11] - 21'd1;if(reg_wr_len[31:11] != 21'd0) beginreg_w_len[7:0] <= 8'hFF;//每次写256个数据reg_w_last <= 1'b0;reg_w_stb[7:0] <= 8'hFF;end else begin//最后不足256个的数据写入reg_w_len[7:0] <= reg_wr_len[10:3];reg_w_last <= 1'b1;reg_w_stb[7:0] <= 8'hFF;endendS_WD_WAIT: begin//等待写总线READY,进入写数据状态if(M_AXI_AWREADY) beginwr_state <= S_WD_PROC;reg_awvalid <= 1'b0;//开始写数据reg_wvalid <= 1'b1;endend//写数据S_WD_PROC: beginif(M_AXI_WREADY & ~WR_FIFO_EMPTY)begin//一次突发写完成if(reg_w_len[7:0] == 8'd0) beginwr_state <= S_WR_WAIT;reg_wvalid <= 1'b0;reg_w_stb[7:0] <= 8'h00;end else beginreg_w_len[7:0] <= reg_w_len[7:0] -8'd1;endendend//写等待S_WR_WAIT: begin//写响应完成if(M_AXI_BVALID) beginreg_wr_status[1:0] <= reg_wr_status[1:0] | M_AXI_BRESP[1:0];if(reg_w_last) begin//写完成wr_state <= S_WR_DONE;end else begin//写未完成wr_state <= S_WA_WAIT;//地址每次递增reg_wr_adrs[31:0] <=reg_wr_adrs[31:0] + 32'd2048;endendendS_WR_DONE: beginwr_state <= S_WR_IDLE;enddefault: beginwr_state <= S_WR_IDLE;endendcaseendendendassign M_AXI_AWID = 1'b0;assign M_AXI_AWADDR[31:0] =reg_wr_adrs[31:0];assign M_AXI_AWLEN[7:0] = reg_w_len[7:0];assign M_AXI_AWSIZE[2:0] = 2'b011;assign M_AXI_AWBURST[1:0] = 2'b01;assign M_AXI_AWLOCK = 1'b0;assign M_AXI_AWCACHE[3:0] = 4'b0011;assign M_AXI_AWPROT[2:0] = 3'b000;assign M_AXI_AWQOS[3:0] = 4'b0000;assign M_AXI_AWUSER[0] = 1'b1;assign M_AXI_AWVALID = reg_awvalid;assign M_AXI_WDATA[63:0] = WR_FIFO_DATA[63:0];assign M_AXI_WSTRB[7:0] = (reg_wvalid & ~WR_FIFO_EMPTY)?8'hFF:8'h00;assign M_AXI_WLAST = (reg_w_len[7:0] == 8'd0)?1'b1:1'b0;assign M_AXI_WUSER = 1;assign M_AXI_WVALID = reg_wvalid & ~WR_FIFO_EMPTY;assign M_AXI_BREADY = M_AXI_BVALID;assign WR_READY = (wr_state == S_WR_IDLE)?1'b1:1'b0;localparam S_RD_IDLE = 3'd0;localparam S_RA_WAIT = 3'd1;localparam S_RA_START = 3'd2;localparam S_RD_WAIT = 3'd3;localparam S_RD_PROC = 3'd4;localparam S_RD_DONE = 3'd5;reg [2:0] rd_state;reg[31:0] reg_rd_adrs;reg [31:0] reg_rd_len;reg reg_arvalid, reg_r_last;reg [7:0] reg_r_len;assign RD_DONE = (rd_state == S_RD_DONE) ;// Read Statealways @(posedge ACLK or negedge ARESETN)beginif(!ARESETN) beginrd_state <= S_RD_IDLE;reg_rd_adrs[31:0] <= 32'd0;reg_rd_len[31:0] <= 32'd0;reg_arvalid <= 1'b0;reg_r_len[7:0] <= 8'd0;end else begincase(rd_state)S_RD_IDLE: begin//读开始if(RD_START) beginrd_state <= S_RA_WAIT;reg_rd_adrs[31:0] <=RD_ADRS[31:0];reg_rd_len[31:0] <= RD_LEN[31:0] -32'd1;endreg_arvalid <= 1'b0;reg_r_len[7:0] <= 8'd0;end//读通道等待S_RA_WAIT: beginif(~RD_FIFO_AFULL) beginrd_state <= S_RA_START;endend//读地址开始S_RA_START: beginrd_state <= S_RD_WAIT;reg_arvalid <= 1'b1;reg_rd_len[31:11] <=reg_rd_len[31:11] -21'd1;if(reg_rd_len[31:11] != 21'd0) beginreg_r_last <= 1'b0;reg_r_len[7:0] <= 8'd255;end else beginreg_r_last <= 1'b1;reg_r_len[7:0] <= reg_rd_len[10:3];endend//读数据等待S_RD_WAIT: beginif(M_AXI_ARREADY) beginrd_state <= S_RD_PROC;reg_arvalid <= 1'b0;endend//读数据开始S_RD_PROC: beginif(M_AXI_RVALID) beginif(M_AXI_RLAST) beginif(reg_r_last) beginrd_state <= S_RD_DONE;end else beginrd_state <= S_RA_WAIT;reg_rd_adrs[31:0] <=reg_rd_adrs[31:0] + 32'd2048;endend else beginreg_r_len[7:0] <=reg_r_len[7:0] -8'd1;endendendS_RD_DONE:beginrd_state <= S_RD_IDLE;endendcaseendend// Master Read Addressassign M_AXI_ARID = 1'b0;assign M_AXI_ARADDR[31:0] =reg_rd_adrs[31:0];assign M_AXI_ARLEN[7:0] = reg_r_len[7:0];assign M_AXI_ARSIZE[2:0] = 3'b011;assign M_AXI_ARBURST[1:0] = 2'b01;assign M_AXI_ARLOCK = 1'b0;assign M_AXI_ARCACHE[3:0] = 4'b0011;assign M_AXI_ARPROT[2:0] = 3'b000;assign M_AXI_ARQOS[3:0] = 4'b0000;assign M_AXI_ARUSER[0] = 1'b1;assignM_AXI_ARVALID = reg_arvalid;assign M_AXI_RREADY = M_AXI_RVALID & ~RD_FIFO_FULL;assign RD_READY = (rd_state == S_RD_IDLE)?1'b1:1'b0;assign RD_FIFO_WE = M_AXI_RVALID;assign RD_FIFO_DATA[63:0] = M_AXI_RDATA[63:0];assign DEBUG[31:0] = {reg_wr_len[31:8],1'd0, wr_state[2:0],1'd0, rd_state[2:0]};endmodule
添加约束
set_property IOSTANDARD LVCMOS33 [get_ports error]
set_property PACKAGE_PIN M14 [get_ports error]

综合
- 将设计导出为HD Wrapper,然后进行综合

- 综合出现错误:需要修改源码或者设计中的名称

添加逻辑分析仪(略)

进行综合、实现、生成bit流



然后直接编译与下载程序


进行ILA调试
-
这个是教程中的截图:

-
这个是我的(我的数据没有改变,我在其他示例项目中进行了测试,当使用PLL作为参考时钟时,数据调试时不会发生变化,我参考这篇文章重新设置了外部的PL端时钟,作为参考时钟,在测试项目中成功了):

-
这里先直接读取一下试试,看看PL端有没有写入成功,PS端代码如下。
-
代码来自http://www.hellofpga.com/index.php/2024/02/04/ebaz4205_pl_ddr_test/:
#include "stdio.h"
#include "xil_cache.h"
#include "xil_printf.h"
#include "xil_io.h"//#define DDR_BASEADDR 0X08000000 // 这里地址需要修改和mem_test中的地址相对应
#define DDR_BASEADDR 0X00000000int main() {int i;char A;Xil_DCacheDisable();print("AXI4 PL DDR TEST!\n\r");print("Please input A to start\n\r");while(1){scanf("%c",&A);if(A=='A'||A=='a'){printf("start\n\r");for(i=0;i<4096;i=i+4){printf("The data for the address %x is %d\n\r",DDR_BASEADDR+i,(int)Xil_In32(DDR_BASEADDR+i));}}}return 0;
}



