相关文章

GNU链接器(LD):PROVIDE、PROVIDE_HIDDEN关键字介绍
0 参考资料
GNU-LD-v2.30-中文手册.pdf
GNU linker.pdf1 前言
一个完整的编译工具链应该包含以下4个部分: (1)编译器 (2)汇编器 (3)链接器 (4)lib库 在GNU工具链中&…

macOS .bash_profile配置文件优化记录
文章目录 说明原文件内容优化思路优化操作测试验证1. 验证JAVA_HOME2. 验证MAVEN_HOME3. 验证MONGODB_HOME4. 验证CLASSPATH5. 验证PATH 说明
展示的代码中,关于具体的文件路径位置,请灵活修改为自己的真实文件目录!
原文件内容
从macOS C…

Redis-主从复制
分布式系统,涉及到一个非常关键的问题:单点问题
如果某个服务器程序,只有一个节点,就会出现:
可用性问题(这个服务器挂了,服务中断)性能/支持的并发量有限
引入分布式系统,主要也是为了解决上述的单点问题
在分布式系统中,希望有多个服务器来部署redis服务,从而构成一个red…
论文阅读笔记-Are Pre-trained Convolutions Better than Pre-trained Transformers?
前言
Transformer诞生到现在,从NLP领域到CV领域,可以说是两开花。特别是在预训练模型中,BERT相关系列近些年屡屡突破,在各种下游任务中,不仅能提速还有效果上的提升。所以在NLP的相关任务中,提及Transformer和CNN时,Transformer一般都会优先考虑,更何况是在预训练语言…
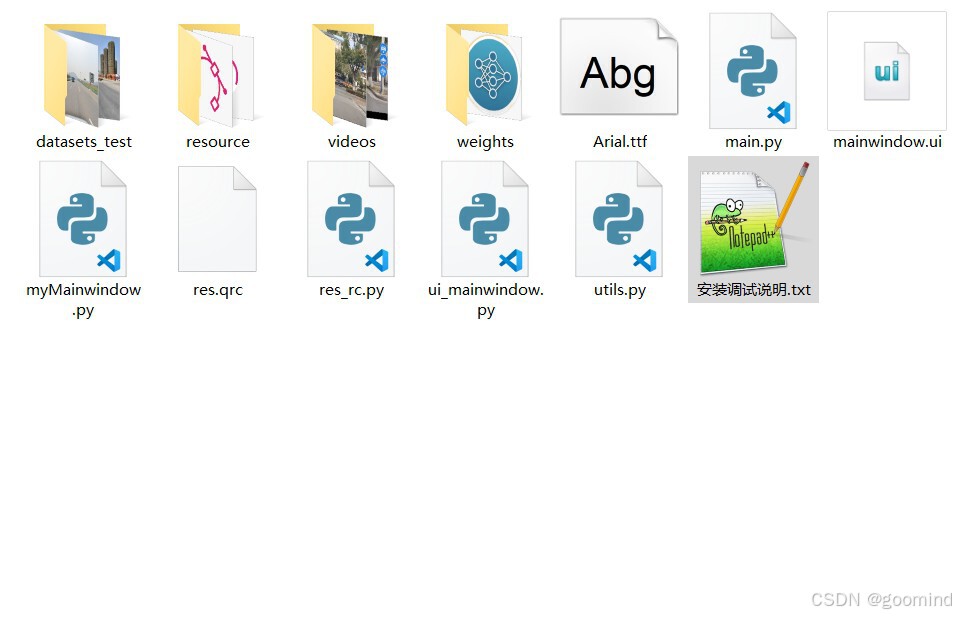
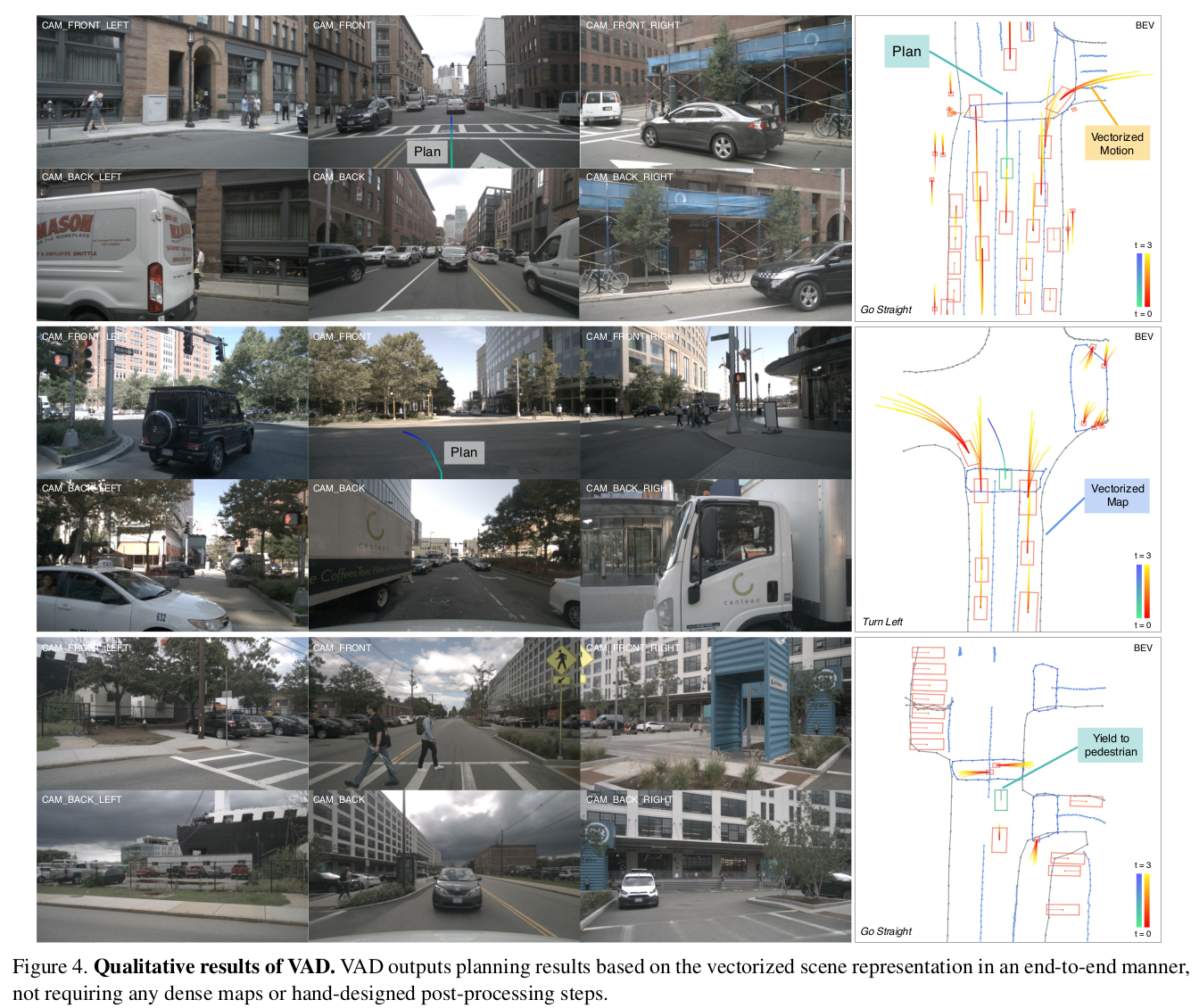
YOLOv8实战工地安全帽检测【数据集+YOLOv8模型+源码+PyQt5界面】
本文采用YOLOv8作为核心算法框架,结合PyQt5构建用户界面,使用Python3进行开发。YOLOv8以其高效的实时检测能力,在多个目标检测任务中展现出卓越性能。本研究针对工地安全帽数据集进行训练和优化,该数据集包含丰富的安全帽图像样本…

【C++网络编程】(一)Linux平台下TCP客户/服务端程序
文章目录 Linux平台下TCP客户/服务端程序服务端客户端相关头文件介绍 Linux平台下TCP客户/服务端程序 图片来源:https://subingwen.cn/linux/socket/
下面实现一个Linux平台下TCP客户/服务端程序:客户端向服务器发送:“你好,服务…