目录
一、进程优先级
二、Linux调度与切换
1.背景
2.进程切换
3.Linux调度
一、进程优先级
背景:在计算机中,软硬件资源是有限的,而进程想要访问某一种资源,就得通过排队来保证访问资源的过程是有条不紊的。
Linux下对优先级的定义。执行命令ps -la得到以下打印结果。
[euto@VM-4-13-centos 24921]$ ps -la
F S UID PID PPID C PRI NI ADDR SZ WCHAN TTY TIME CMD
0 S 1001 29067 28781 0 80 0 - 1054 hrtime pts/1 00:00:00 myprocess
1 S 1001 29068 29067 0 80 0 - 1054 hrtime pts/1 00:00:00 myprocess
0 R 1001 29078 28979 0 80 0 - 38332 - pts/2 00:00:00 ps
- UID:代表执行者的身份
- PRI:priority的缩写,代表这个进程的优先级,Linux下优先级就是一个整型变量,默认值为80,取值范围为
,值越小,优先级越高。
- NI:nice的缩写,用来代表相对默认值的增量。
Linux下进程的优先级可以人为手动修改,但是需要我们手动修改优先级的场景几乎没有。
下面演示如何修改优先级,首先可执行程序myprocess已经被运行了起来,执行ps -la查看。
[euto@VM-4-13-centos 24921]$ ps -la
F S UID PID PPID C PRI NI ADDR SZ WCHAN TTY TIME CMD
0 S 1001 2310 28781 0 80 0 - 1054 hrtime pts/1 00:00:00 myprocess
0 R 1001 2330 28979 0 80 0 - 38332 - pts/2 00:00:00 ps
执行top命令进入任务管理器。

进入任务管理器后,输入r。
得到一行提示,大致意思是“输入要重新设置nice值的PID”。
PID to renice [default pid = 5375]当前要修改优先级的程序myprocess的PID为2310,于是输入2310。
弹出一行提示,大致意思是“输入新的nice值”,我们暂时输入10。
Renice PID 2310 to value
退出任务管理器后,再执行ps -la命令查看。
[euto@VM-4-13-centos 24921]$ ps -la
F S UID PID PPID C PRI NI ADDR SZ WCHAN TTY TIME CMD
0 S 1001 2310 28781 0 90 10 - 1054 hrtime pts/1 00:00:00 myprocess
0 R 1001 7772 28979 0 80 0 - 38332 - pts/2 00:00:00 ps
我们发现myprocess的PRI值由80变成了90,而NI值由0变成了10。
因此,可以总结出来,Linux下修改优先级不能直接修改,而是通过加减某一个量来修正。
NI值是用来表示当前PRI值相对默认PRI值的增量,由于PRI的范围是,默认PRI值是80,故NI值的取值范围是
。
PRI = 默认PRI(80)+ NI。
- NI可以取范围外的值吗,如果可以,PRI会被修改为多少?
在top中修改NI值的时候,输入100。

执行ps -la查看结果。
[euto@VM-4-13-centos 24921]$ ps -la
F S UID PID PPID C PRI NI ADDR SZ WCHAN TTY TIME CMD
0 S 1001 2310 28781 0 99 19 - 1054 hrtime pts/1 00:00:00 myprocess
0 R 1001 13253 28979 0 80 0 - 38332 - pts/2 00:00:00 ps
可以总结出来,修改的NI值会被操作系统做检测,如果超出范围则修正到范围之内。
在上面结果的基础上,将NI值设置为-20,预期结果应该是99-20=79。

执行结果如下。
[euto@VM-4-13-centos ~]$ ps -la
F S UID PID PPID C PRI NI ADDR SZ WCHAN TTY TIME CMD
0 S 1001 16994 16006 0 60 -20 - 1054 hrtime pts/1 00:00:00 myprocess
0 R 1001 18523 16091 0 80 0 - 38332 - pts/2 00:00:00 ps
这里我中断进程后,重新启动了程序,所以PID发生了变化,但是前提条件是一样的,不难看出来,NI值变成了-20,说明NI值是覆盖原来的值,但是PRI并不是我们预期的79,而是60。原因是每次调整优先级的NI值,都是在默认的PRI值80上做加减。
- 为什么要让优先级的修改受限?
操作系统中,存在很多必要的常规进程,如果进程的优先级可以无限大,必然会造成多数用户进程的优先级比常规进程的优先级高,导致常规进程获取资源的优先度下降,造成系统卡顿。
而把一个进程获取资源优先度不高的情况称为进程饥饿。
二、Linux调度与切换
1.背景
- CPU在执行一个进程的时候,是直接一次性把代码跑完吗?
不是,现代操作系统设计的CPU执行代码,都是基于时间片轮转执行的。假设时间片大小是1ms,那么一个进程在CPU上执行1ms后,CPU会马上开始执行另外一个进程。
- 竞争性:系统进程数目众多,而CPU资源少量,甚至只有一个,所以进程之间是具有竞争性的,为了高效完成任务,合理竞争相关资源,便有了优先级。而为了保证优先级,便设计了调度器基于时间片轮转执行每一个进程。
- 独立性:进程之间具备独立性,多个进程运行期间互不影响,这种不影响指的是一个进程不影响另一个进程的执行。
- 并行:多个进程在多个CPU下,同时运行,称为并行。
- 并发:多个进程在一个CPU下,通过高频进程切换的方式,让多个进程都得以推进运行,称为并发。
如今多数人的个人电脑都只有一个CPU,因此多个进程之间是并发运行,如果把时间精确到CPU的一个时间单元上,那么CPU在这个时间单元上执行的指令是确定的只有一条,而用户感知到的是我们的电脑可以打游戏的同时听音乐,原因就在于我们的CPU非常快!!!(多核其实就是CPU内部有一个控制器,多个运算器)
2.进程切换
CPU有一个运行队列,CPU要轮转切换多个进程。
- CPU内部有大量寄存器,这些寄存器的种类不一。
- 进程A正在CPU上被执行时,该时间片内,寄存器上会产生许多临时数据,这些临时数据是和当前的进程A相关的,这些大量临时数据称为进程的硬件上下文。
- 时间片结束,CPU要执行下一个进程B,在此之前,要把寄存器的数据拷贝到进程A的PCB内部(也有部分数据拷贝到了其他地方),这个过程称为保护上下文。
- CPU开始执行进程B,那么就有两种情况,如果进程B是首次被调度,那么进程B直接开始执行,在执行期间所产生大量临时数据直接覆盖寄存器原来的数据。如果进程B是非首次被调度,那么进程B会先把PCB保存的数据恢复到寄存器中,然后开始执行。这个过程称为恢复上下文。
CPU的寄存器只有一套,但是寄存器要处理的数据有多套,这些大量临时数据不属于寄存器,而是属于进程!!!
3.Linux调度
在操作系统理论部分,大部分人了解到操作系统对进程的调度都是类似FIFO的处理方法。下面以Linux系统的调度作详细说明。
概括性的总结一句话就是,Linux实现的调度算法,考虑了进程的优先级,考虑了进程饥饿问题,考虑了效率。

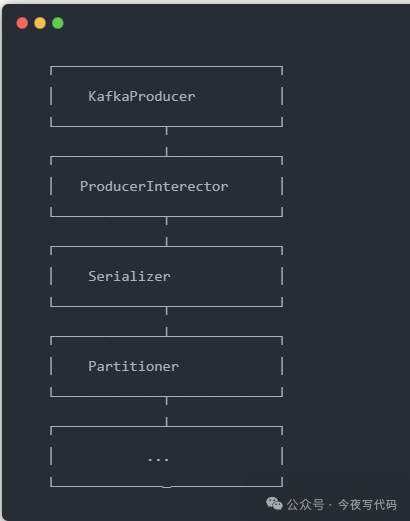
上面这张图是Linux系统中对CPU运行队列的实现,其中,有两个定义一模一样的结构,大致结构内容如下。
struct Qq
{int nr_active;int bitmap[5];struct task_struct* queue[140];
}先来介绍queue,这是一个PCB指针数组,一共有140个地址,但是【0,99】是用来给实时操作系统调度的,而【100,139】一共40个地址刚好对应进程的40个优先级,是给分时操作系统调度用的。
这里要简单介绍一下调度上对操作系统的分类。
调度上把操作系统分为实时操作系统和分时操作系统两种,区别仅仅在于CPU调度的时候。正常情况下,计算机只有一个CPU,CPU的执行都是轮转时间片,这是分时操作系统。但是,在有些特殊场景下,不需要轮转这个动作,CPU执行进程必须是实时、立刻、马上,因此Linux也考虑了实时操作系统的设计而定义了【0,99】这100个空间。
【100,139】对应40个优先级。

这里的设计采用了类似哈希桶的设计,优先级相同的进程会被链接在一起,如下所示。

那么,CPU在轮转进程的时候,是从优先级为60的位置一个个向后遍历吗?
不是的,为了解决遍历的低效率,便设计了bitmap[5],这是一个整型数组,利用了位图这种数据结构的思想,STL位图,用比特位来表示是与否的两种状态,一个整型类型有32个比特位,5个整型就是有160个比特位。
queue的一个位置就映射着bitmap的一个比特位,如果比特位为0,表示对应数组的某一个位置没有进程,如果比特位为1,表示对应数组的某个位置有进程。
nr_active用来表示queue中有多少个位置是有进程的。
Linux设计了这样的一种结构后,发现解决了进程优先级和效率问题,但是进程饥饿问题还没有解决。因此,为了解决进程饥饿问题,Linux把这种结构再复制了一份,并且其中一份叫活跃进程队列,一份叫过期进程队列。
进程在被执行的时候,CPU在一个时间片内轮转一个进程,轮转结束后,把这个进程放在过期进程队列里,于是,活跃进程队列里面的进程数量不断减少,过期进程队列里面的数量不断增加。
CPU只在活跃进程队列里面执行进程,一个时间片轮转一个进程,在CPU轮转活跃进程队列的时候,如果有一个进程优先级设置的更高需要被执行,那么可能造成进程饥饿问题。因此,当CPU轮转进程的时候,操作系统又把其他进程放进来时,是放在了过期进程队列里面,不影响CPU轮转当前进程,这就解决了进程饥饿问题。
那么,直到活跃进程队列里面的进程全部被执行完,此时过期进程队列里面有着许许多多需要被CPU执行的进程。

Linux又设计了两个指针,这两个指针的内容如下。
struct Qq array[2];//结构体数组,内有两个进程队列
struct Qq* active = array[0];
struct Qq* expired = array[1];array是结构体数组,用来存放Linux设计的两个一模一样的结构体。而这两个指针分别指向array数组的两个元素。
本质上,active指向活跃队列,expired指向过期队列,当活跃队列为空,此时过期队列“满满当当”,于是active就和expired交换指针内容。
结果就是,CPU执行时只会去轮转active指向的队列,因为当active指向的队列为空的时候,操作系统会让它去指向另外一个“满满当当”的队列。
Linux调度算法的设计,完美解决了CPU轮转进程的不足!!!