文章目录
- D435简介
- RealSense的SDK2.0安装
- 方法1:直接利用安装源安装
- 注册服务器公匙
- 将服务器添加到存储库列表
- 安装库
- 方法2:利用源码安装
- GitHub下载librealsense
- 安装编译依赖
- 运行脚本
- cmake编译
- 软件显示
- ROS接口安装
- 启动节点
- 查看话题
- rviz显示点云
- Python接口安装
D435简介

Intel RealSense D435是Intel推出的一款结合RGB和深度摄像的立体视觉摄像头,具有以下主要特点:
-
使用双摄像头和红外投射器实现立体视觉采集。
-
提供频率可达90Hz的VGA分辨率(640x480)深度图像。
-
具有2个720p RGB摄像头,提供1920x1080分辨率彩色视频流。
-
使用全局快门同步RGB图像和深度图像。
-
内置6轴IMU运动跟踪模块。
-
支持近距离检测,最小检测距离约0.25米。
-
提供硬件级图像流同步和时间戳。
-
支持USB 3.0接口传输高速率图像流。
-
提供SDK开发包,兼容ROS、OpenCV等主流框架。
-
小巧轻便的模块化设计。
D435采用了活体立体视觉技术,具有准确、高帧率的深度映射能力,可广泛应用于机器人定位与导航、物体识别、人机交互等计算机视觉任务中。
RealSense的SDK2.0安装
方法1:直接利用安装源安装
注册服务器公匙
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
将服务器添加到存储库列表
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
安装库
基础
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
可选
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
不过这个方法只能下在最新版本,由于ros2的适配,该版本的realsense-ros对ros2匹配,因此在下载时建议使用方法2下载
方法2:利用源码安装
GitHub下载librealsense
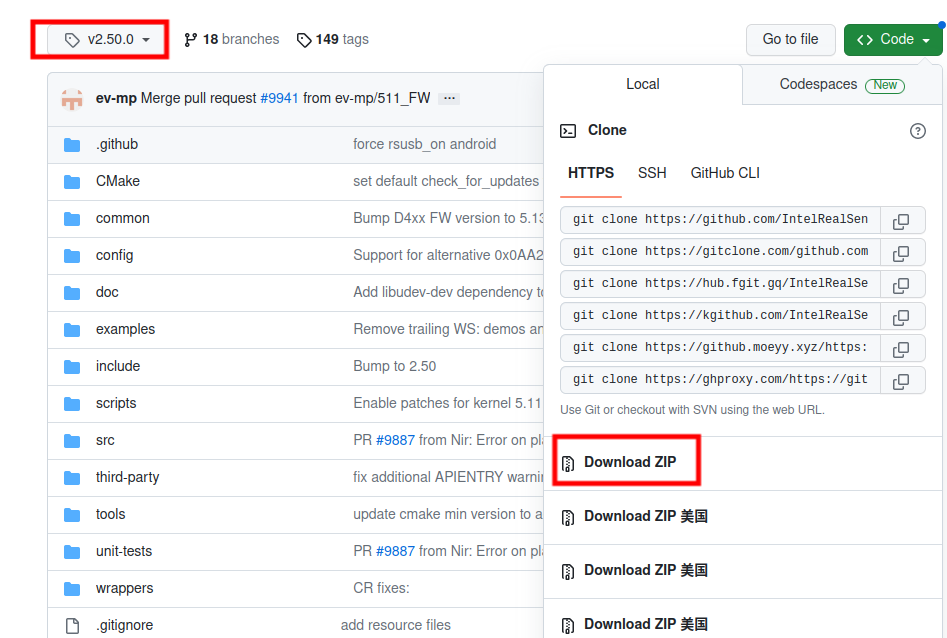
这里以v2.50.0版本为例
安装编译依赖
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev bison flex
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev libelf-dev elfutils
运行脚本
cd librealsense-2.50.0/
./scripts/setup_udev_rules.sh
cmake编译
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make -j8 #j8的意思是根据自己处理器内核数量来加快编译
sudo make install
重新连接 Intel Realsense 深度摄像机并运行: realsense-viewer 以验证安装
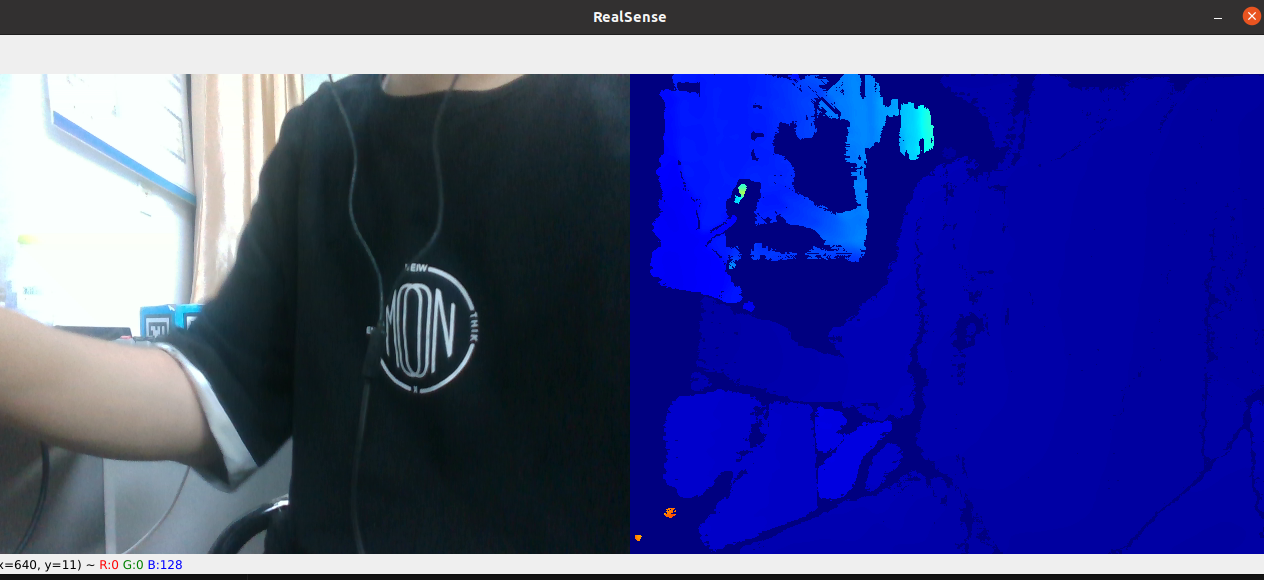
软件显示
连接d435与电脑
realsense-viewer
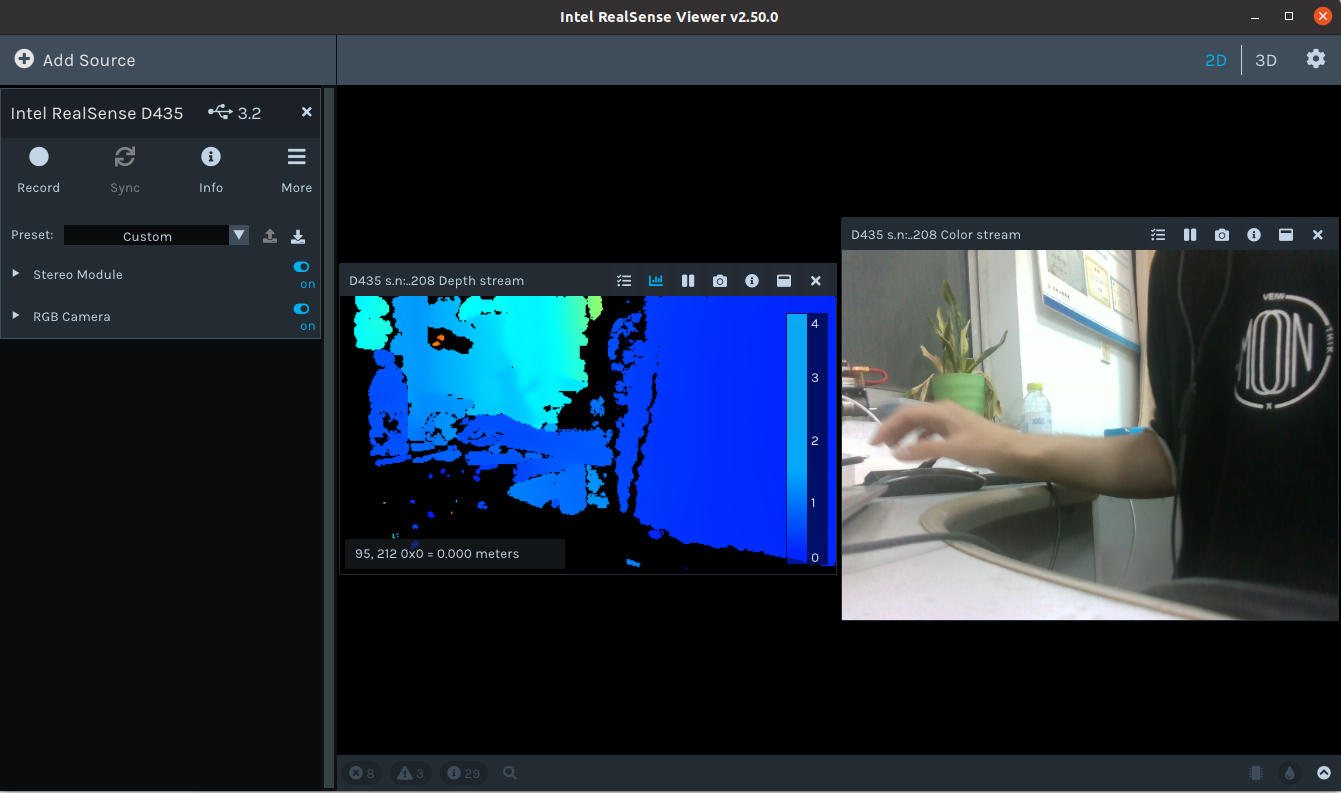
左侧的Stereo Module可以开启深度图显示,RGB Module可以显示RGB影像
ROS接口安装
由于ros1的维护,直接安装会以最新版本下载,其适配ros2,导致编译失败,所以在安装时要选择与之ros相对应的tag
以ros noetic为例
安装realsense-ros: https://gitcode.net/mirrors/intelrealsense/realsense-ros?utm_source=csdn_github_accelerator
安装ddynamic_reconfigure:https://gitcode.net/mirrors/pal-robotics/ddynamic_reconfigure?utm_source=csdn_github_accelerator
下载其压缩包,然后解压缩到~/catkin_ws/src目录下
编译
catkin_make
启动节点
roslaunch realsense2_camera rs_camera.launch
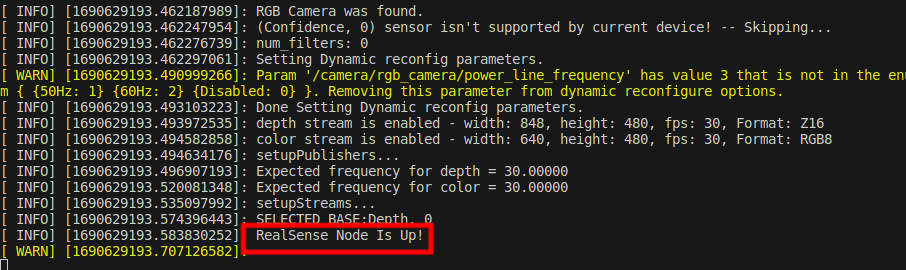
出现RealSense Node Is Up!证明节点启动成功
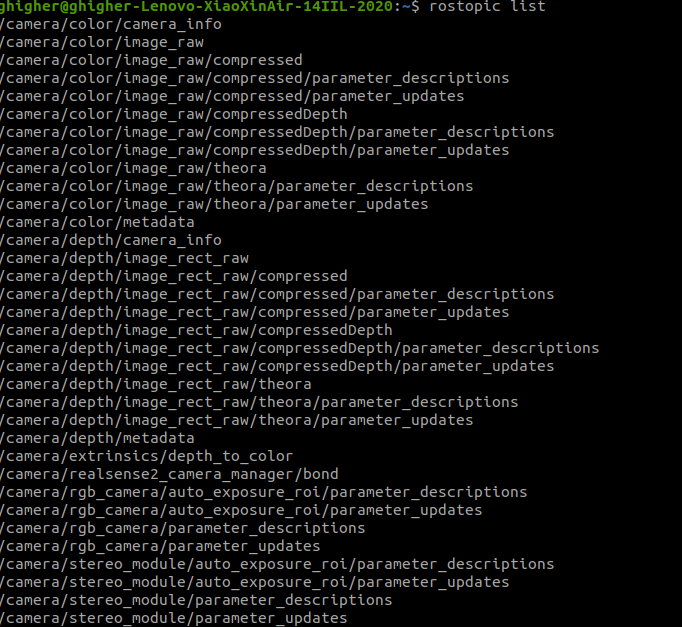
查看话题
rostopic list
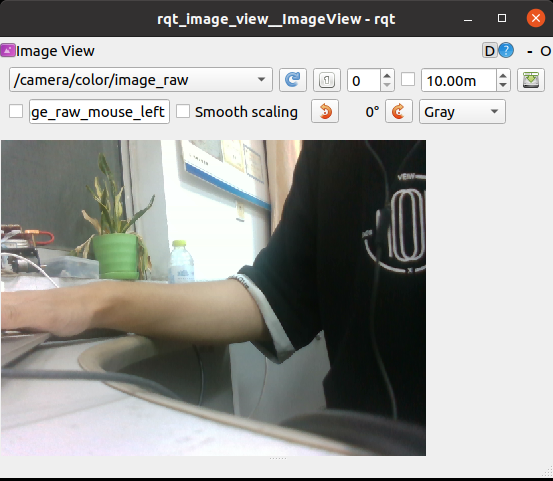
rqt_image_view
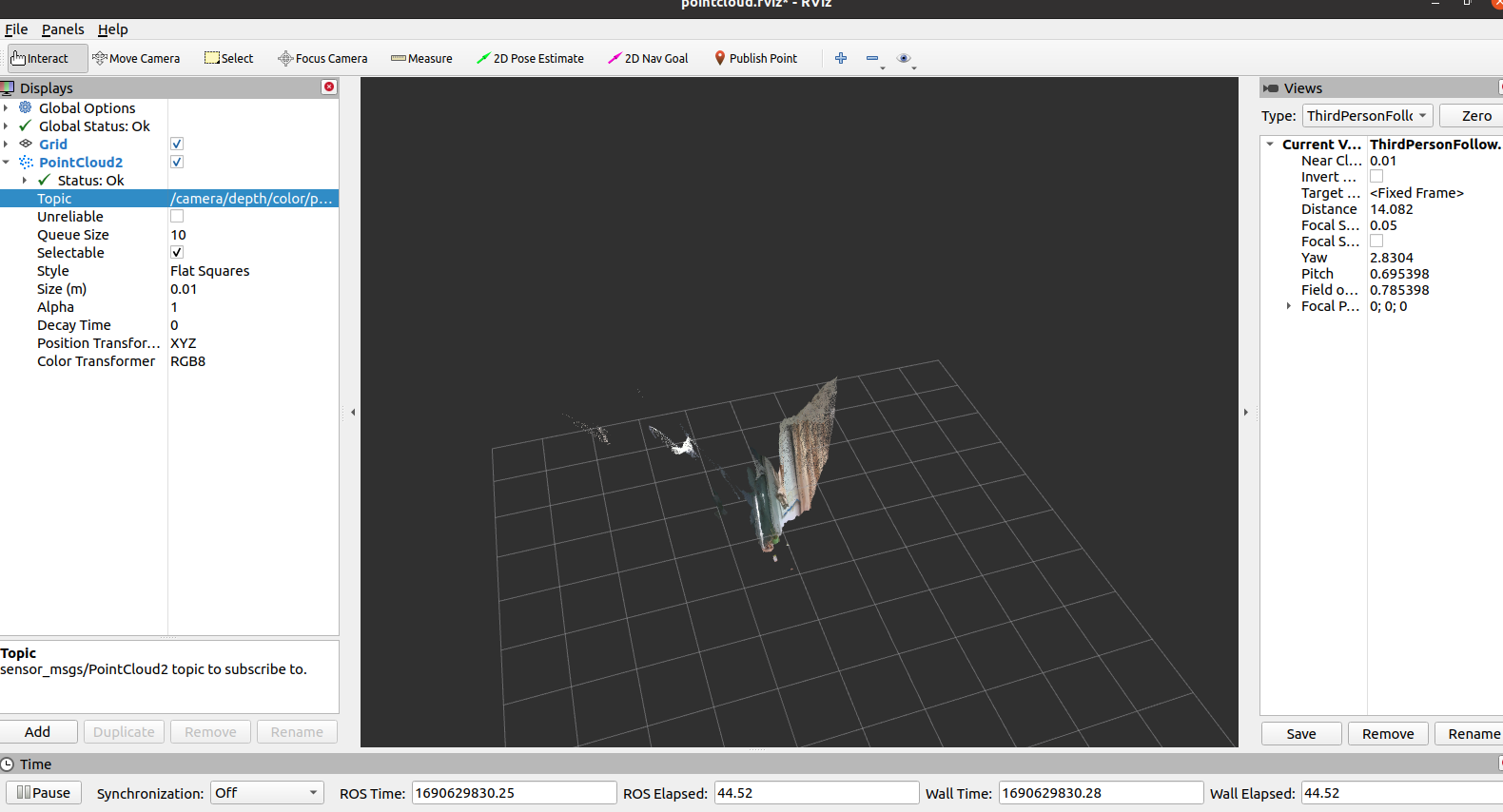
rviz显示点云
roslaunch realsense2_camera demo_pointcloud.launch
Python接口安装
pip install pyrealsense2
import pyrealsense2 as rs
import numpy as np
import cv2if __name__ == "__main__":# Configure depth and color streamspipeline = rs.pipeline()config = rs.config()config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)# Start streamingpipeline.start(config)try:while True:# Wait for a coherent pair of frames: depth and colorframes = pipeline.wait_for_frames()depth_frame = frames.get_depth_frame()color_frame = frames.get_color_frame()if not depth_frame or not color_frame:continue# Convert images to numpy arraysdepth_image = np.asanyarray(depth_frame.get_data())color_image = np.asanyarray(color_frame.get_data())# Apply colormap on depth image (image must be converted to 8-bit per pixel first)depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET)# Stack both images horizontallyimages = np.hstack((color_image, depth_colormap))# Show imagescv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)cv2.imshow('RealSense', images)key = cv2.waitKey(1)# Press esc or 'q' to close the image windowif key & 0xFF == ord('q') or key == 27:cv2.destroyAllWindows()breakfinally:# Stop streamingpipeline.stop()
![一、SpringBoot基础[日志]](/images/no-images.jpg)