5.2 状态机要求
5.2.1 NOP/HWP 状态机
NOP/HWP状态机如下所示:
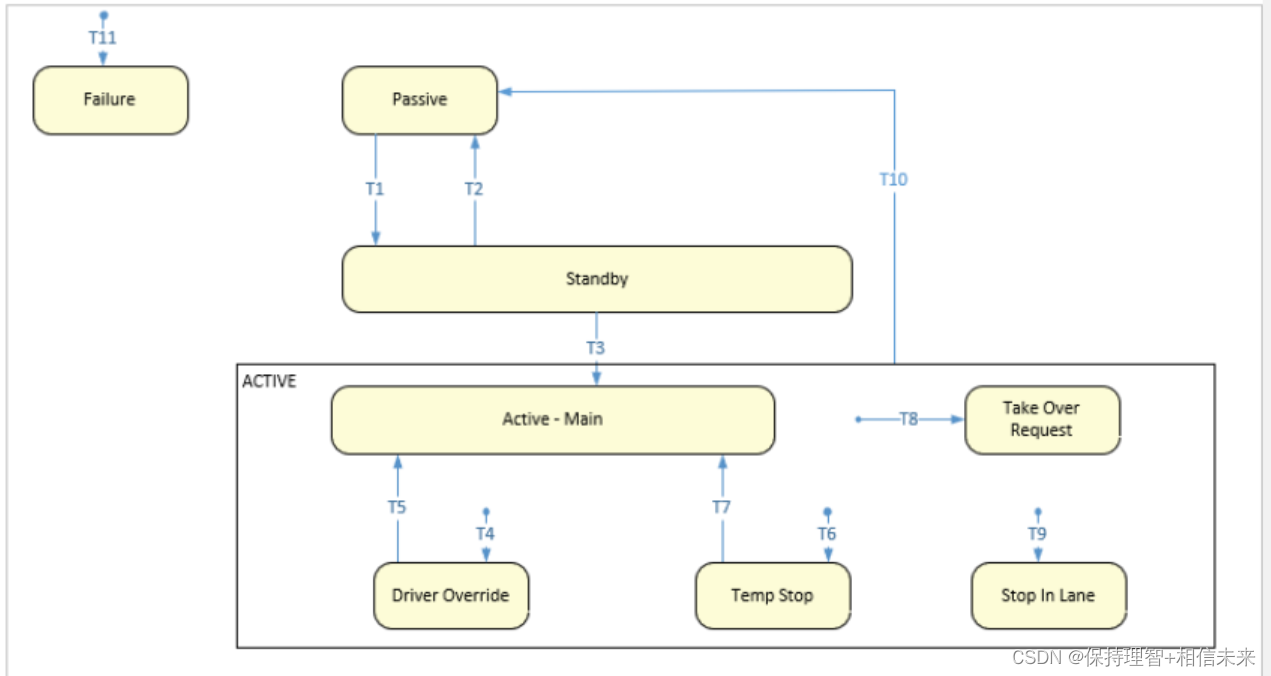
下表总结了这些状态:
| 状态 | 描述 |
| Passive | 不满足功能条件,功能无法控制车辆执行器。 |
| Standby | 满足功能条件。该功能不是由驾驶员激活的。功能不控制车辆执行器。 |
| Active - Main | 功能由驾驶员激活。功能是控制车辆。在某些情况下,驾驶员可以松手。 |
| Override | 驾驶员加速请求优先于功能的加速请求(如果更高)。 |
| Temp Stop | 当本车跟随前车停止时,系统进入Temp_Stop模式; 当车辆静止且驾驶员通过AD按钮激活HWP/NOP功能时,系统进入Temp_Stop模式; 不得根据 NOP 请求对动力传动系进行控制。 |
| Take Over | 当功能失效或ODD退出时,该功能应要求驾驶员接管。在此模式下,可以向驾驶员生成音频/视觉/触觉信号。驾驶员必须在 4 秒内接管车辆的控制权。 接管持续时间至少为 2 秒(即使驾驶员在此之前已接管控制权)。 |
| Stop in Lane | 如果功能失效或驾驶员无法接管车辆的控制,功能应使车辆停在车道上。 |
5.2.2 状态机——基础
功能转换和描述如下表所示。状态机有几个层次:
1. 基础状态机;
2.ODD状态机;
3. 驾驶员注意力状态机;
4. 车辆健康状况;
5. 车辆功能仲裁;
6. ADCU功能仲裁。
5.2.3 故障管理器
健康状态机指示系统健康状况单独描述。该状态机涵盖车辆和系统相关故障(传感器、硬件)。系统健康状态机应链接到此工作项。
5.2.4 自动变道状态机
自动换道状态机如下图给出:
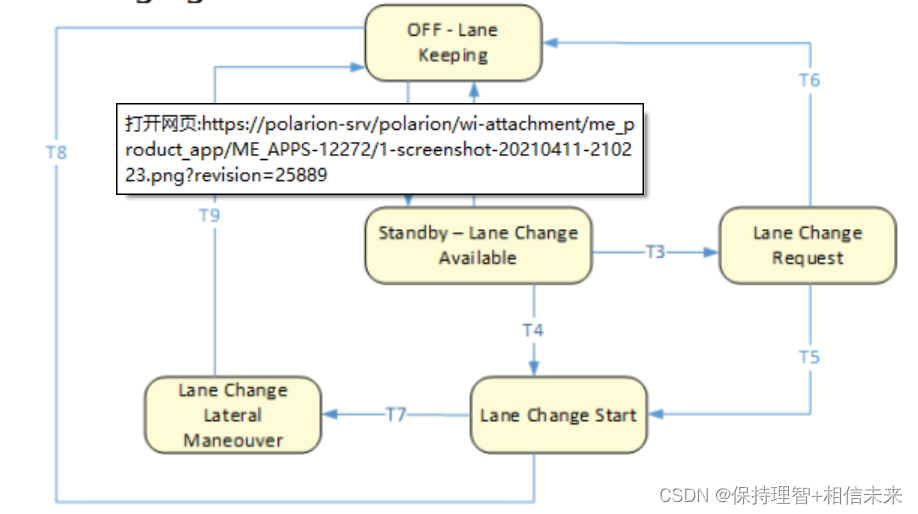
下表总结了这些状态:
| 状态 | 描述 |
| Off (Lane Keeping mode) | 该状态关联的 ALC 未启用,因此父驾驶功能将自车保持在自车车道中。 |
| Standby – Lane Change Available | 满足执行变道的条件,驾驶员的行为根据条件(注意力、眼睛注视道路等)而定。 |
| Lane change request | 在此状态下,驾驶员确认或请求变道。 |
| Lane Change Start | 变道的横向运动已开始,前轮尚未越过车道线(车辆仍在 Egolane 中)。 |
| Lane Change Lateral maneuver | 自车越过车道线,完成进入目标车道的机动,并在目标车道的中心进行调整。 |
5.2.4.1 T1 – 从关闭(车道保持)模式转换到待机 – 车道变更可用模式
如果同时满足以下条件,则应进行 T1:
1. 保持 ALC-ODD 条件(还考虑 10 秒的驾驶时间);
2. 目标车道宽度在本车两侧均有效;
3. 行驶 10 秒内的目标车道宽度满足要求;
4. 满足速度和距离条件;
5. 驾驶员注意力集中并注视道路;
6. 在 HMI 中启用 ALC;
7. 驾驶员双手模式。
5.2.4.2 T2 – 从待机状态转换 – 车道变换可用于关闭(车道保持)模式
如果满足以下条件之一,则应进行 T2:
1. 不满足 ALC - ODD 条件(还考虑到 10 秒的驾驶时间);
2. 自车两侧的目标车道宽度无效;
3. 速度和距离条件无效;
4. 驾驶员视线移开 TBD 秒;
5. 在 HMI 中禁用 ALC;
6. 驾驶员双手模式。
5.2.4.3 T3 – 从待机状态转换到车道变更请求模式
如果满足以下条件,则应进行 T3:
1. Hands-on:驾驶员激活转向灯。
2. Hands-off:
| Logic1 | Logic2 | 条件 |
| OR | AND | 驾驶员激活转向灯 |
| 变道确认已开启 | ||
| AND | 变道确认已关闭 | |
| 驾驶员在变道开始前激活转向灯 |
5.2.4.4 T4 – 从待机状态转换到变道启动模式
T4 仅适用于 Hands off 模式,并且在以下条件适用时发生:
| Logic1 | Logic2 | 条件 |
| AND | AND | 驾驶员未将转向灯转向与变道相反的方向 |
| 驾驶员注视道路 | ||
| ALC-ODD 有效 | ||
| 适用的车道标记为虚线 | ||
| 目标自车车道足够宽达 10 秒 | ||
| 遵守目标距离的临界距离 | ||
| 自车速度高于 ECE R79 规定的速度限制 | ||
| Hands off 模式已激活 | ||
| 变道确认已关闭 | ||
| OR | 存在超车条件(自车车道速度慢于目标车道) | |
| NOP 正在使用有效的导航路线,并且导航需要变更车道 | ||
| 自车位于左车道且驾驶员激活了中间车道偏好,并且当前道路至少有 3 个车道 | ||
| 在自车车道中检测到障碍物 | ||
| 前方车道合并或分离 |
5.2.4.5 T5 – 从车道变更请求到车道变更启动模式的转换
如果满足以下条件,则应进行 T5:
| Logic1 | 条件 |
| AND | 双手检测状态机是否有效 |
| 驾驶员未将转向灯转向与变道相反的方向 | |
| 司机注视道路 | |
| ALC-ODD 有效 | |
| 适用的车道标记为虚线 | |
| 目标自车车道足够宽 10 秒 | |
| 遵守目标距离的临界距离 | |
| 自车速度高于 ECE R79 规定的速度限制 | |
| 请求变道的持续时间至少为 3 秒且少于 5 秒 (ECE R79) |
5.2.4.6 T6 – 从车道变更请求到关闭(车道保持)的转换
如果满足以下条件,则应进行 T6:
| Logic1 | 条件 |
| OR | 放手状态机无效 |
| 驾驶员将转向灯转向与变道方向相反的方向 | |
| 已触发闭眼警告 | |
| ALC-ODD 无效 | |
| 在临界距离内发现移动目标 | |
| 自车速度低于 ECE R79 给出的速度 | |
| 车道变更请求的持续时间超过 5 秒 (ECE R79) |
5.2.4.7 T7 – 从变道开始过渡到变道横向操作
如果满足以下条件,则应进行 T7:
| Logic1 | 条件 |
| AND | 前轮越过车道标记 |
| 放手状态机有效 | |
| 驾驶员未将转向灯转向与变道相反的方向 | |
| 司机注视道路 | |
| ALC-ODD 有效 | |
| 适用的车道标记为虚线 | |
| 目标自车车道足够宽 10 秒 | |
| 遵守目标距离的临界距离 | |
| 自车速度高于 ECE R79 规定的速度限制 |
5.2.4.8 T8 – 从变道开始到关闭的过渡(车道保持)
如果满足以下条件,则应进行 T8:
| Logic1 | 条件 |
| OR | 前轮未越过车道标记 |
| 放手状态机无效 | |
| 驾驶员将转向灯转向与变道方向相反的方向 | |
| 已触发闭眼警告 | |
| ALC-ODD 无效 | |
| 在临界距离内发现移动目标 | |
| 自车速度低于 ECE R79 给出的速度 |
5.2.4.9 T9 – 从变道横向操作过渡到关闭(车道保持)
如果满足以下条件,则应进行 T9:
| Logic1 | 条件 |
| / | 自车后轮完全通过车道标记 |
5.2.4.10 NOP – 变道期间重新规划路线
NOP 在执行变道时应锁定当前活动路线。变道期间不允许重新规划路线和更新路线。
5.2.5 脱手状态机
5.2.5.1 脱手条件
有下列情况时,禁止脱手操作:
1. 可见度有限——以防在检测范围内无法检测到危险和/或物体;
2. 驾驶员未启用自动驾驶。
5.3 感知和传感器要求
5.3.1 ACC / HWP / NOP 目标车型
纵向控制功能应在根据 ISO 定义 3833:1977 定义的以下类型的可许可车辆上运行 – 道路车辆(类型):
1. 紧凑型汽车;
2. 中型汽车;
3. 皮卡车;
4. 豪华轿车;
5. 公共汽车;
6. 半挂车;
7. 摩托车;
8. 牵引拖车的车辆。
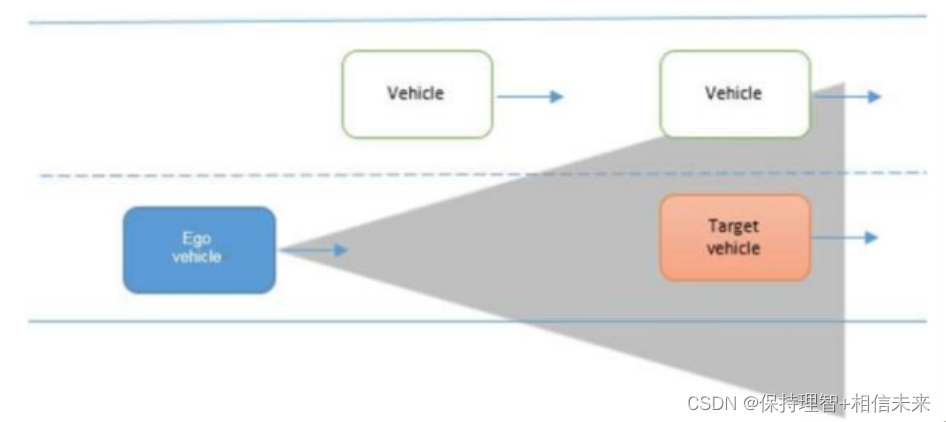
5.3.2 目标辨别
如果直道和稳态弯道上前方车辆多于一辆,则仅选择本车行驶路径中的前方车辆(下图目标车辆)进行纵向控制。
5.4 人机界面(HMI)要求
5.4.1 驾驶员注意力
驾驶员在功能操作过程中保持注意力集中。应使用驾驶员监控要求中给出的驾驶员注意力状态机要求来验证驾驶员注意力。
方向盘离手检测(HOD)应基于信号 HandsOnDetection。
该功能应根据驾驶员监控要求发出驾驶员注意信号。
5.4.2 HWP/NOP状态报告
用于报告 HWP / NOP 不可用的信号是 AsyAutDrvgAvl。
5.4.3 法定速度融合
与法定速度融合应使该功能能够根据 REM-HD 地图中指示的法定速度确定其速度限制。驾驶员可以选择使用信号 AccFusnTrfcReq ==OnOff1_On 来激活此功能。
如果 Fusion with Legal Speed 处于激活状态,该功能应向 HMI 发送 AccFusnTrfcSgn ==OnOff2_On。
要停用 Fusion with Legal Speed,HMI 应发送信号 AccFusnTrfcReq ==OnOff1_Off,并且功能应将 AccFusnTrfcSgn ==OnOff2_Off 发送回 HMI。
如果出于某种原因,Fusion with Legal Speed 出现故障/错误,功能应向 HMI 发送 AccFusnTrfcSgn ==OnOff2_Off。
5.4.4 速度设定显示
该功能使用的当前速度设置应通过信号 DispSpdSetForLgtCtrl 显示。
该功能应使用信号 DispTSIInfoForLgtCtrl 来指示该速度设置是否基于 TSR 融合。
如果速度设置基于驾驶员输入,则该功能应发送 DispTSIInfoForLgtCtrl==0x2:No。
如果该功能使用 TSI 的速度限制作为速度限制,则该功能应发送 DispTSIInfoForLgtCtrl==0x1:Yes。
当驾驶员改变速度设定时,该功能应将新的速度限制发送到HMI。
5.4.5 纵向控制关键策略
设定的速度单位应使用信号 VehSpdIndcdVeSpdIndcdUnit。
| ACC/HWA 状态 | Speed + | Speed - | Resume | Set | Cancel |
| Standby | N/A | N/A | 如果点火后首次激活,且车速高于 0 km/h 且低于 30 km/h:设定速度应为 30 km/h。 如果车辆速度高于或等于 30 km/h且低于 MAX_Velocity - 速度应设置为当前速度。 其他情况 - 功能将使用最后设置的速度切换到激活状态。 | 如果车辆速度高于 0 公里/小时且低于 30 公里/小时:设置速度应为 30 公里/小时。 如果车辆速度高于或等于 30 且低于 MAX_Velocity - 设置速度应为当前速度。 | N/A |
| Active | 将设定速度提高TBDkm/h | 将设定速度降低 TBDkm/h | N/A | N/A | 取消功能 |
| Override | 将设定速度提高TBDkm/h | 将设定速度降低 TBDkm/h | N/A | 如果车辆速度高于 0 公里/小时且低于 30 公里/小时:设置速度应为 30 公里/小时。 如果车辆速度高于或等于 30 且低于 MAX_Velocity - 设置速度应为当前速度。 | 取消功能 |
| StandWait (ACC) / TempStop (HWA) | 将设定速度提高TBDkm/h | 将设定速度降低 TBDkm/h | 恢复功能 | N/A | 取消功能 |
| StandActive | 将设定速度提高TBDkm/h | 将设定速度降低 TBDkm/h | N/A | N/A | 取消功能 |
| Failure | N/A | N/A | 发送激活失败消息 | 发送激活失败消息 | N/A |
5.5 路线要求 - 仅 NOP
NOP 可以从外部导航源接收路线。有效路由应满足以下条件:
1. 路线距离必须大于 500m;
2. 支持的最大路线长度为 600 Km。
当 NOP 功能激活时,应使用从外部导航源接收到的路线。如果路由无效 - 该功能将退出(没有接管请求)。
当激活时,NOP 功能将定期检查新路由。如果路线有更新,则会无缝切换到新路线。
当NOP由于任何原因偏离路线时,NOP功能将退出(无接管请求)。
5.6 控制要求
5.6.1 纵向控制
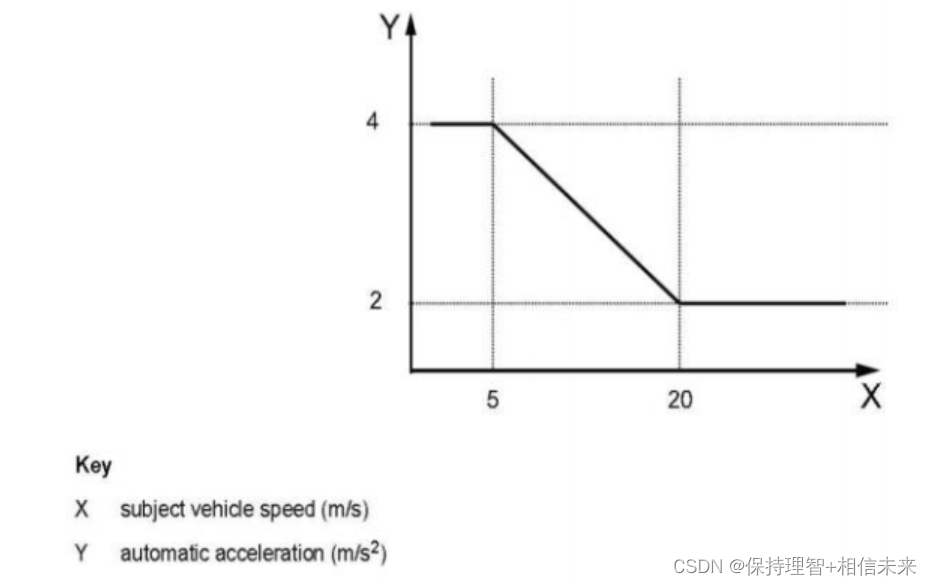
5.6.1.1 HWP/NOP 加速请求
加速度请求应由该功能限制为下图中给出的值。
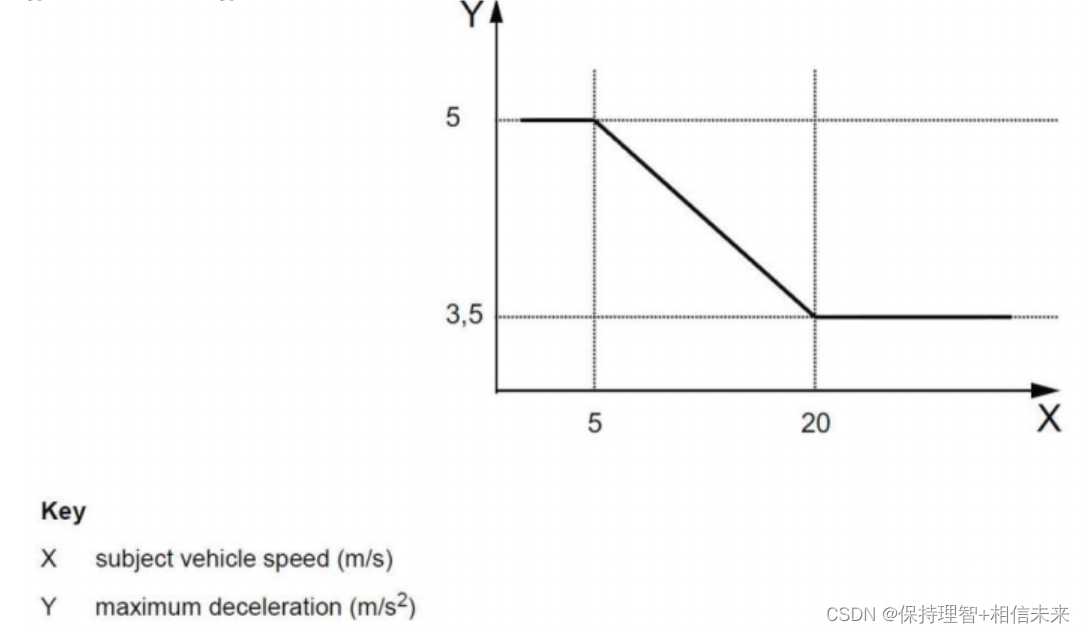
5.6.1.2 HWP/NOP 减速请求
减速请求应由该功能限制为下图中给出的值。
5.6.1.3 HWP / NOP 加加速度限制
对于 HWP / NOP,整个速度范围内自动减速度(负加加速度)的平均变化率不得超过 5 m/s³。
5.6.2 横向控制
5.6.3 横向控制限制
ECE R79 的横向控制限制如下:
| 速度范围 | 10-60 km/h | 60-100 km/h | 100-130 km/h | >130 km/h |
| 指定最大横向加速度的最大值 | 3 m/s2 | 3 m/s2 | 3 m/s2 | 3 m/s2 |
| 指定最大横向加速度的最小值 | 0 m/s2 | 0.5 m/s2 | 0.8 m/s2 | 0.3 m/s2 |
ISO 21717-2018 将横向加速度要求定义为:
如果车速高于 8 m/s,则最大横向加速度应为 3 m/s2。
如果车速低于 8 m/s,则最大横向加速度应为 5 m/s2。
HWP / NOP 功能应实现以下横向加速度和加加速度限制:
速度高于 10 km/h 时的最大横向加速度为 3 m/s2。
速度低于 10 km/h 时的最大横向加速度为 5 m/s2。
系统产生的横向加加速度半秒以上的移动平均值不得超过5 m/s³。
5.6.3.1 横向扭矩限制
为了让驾驶员始终接管转向请求,该功能产生的转向扭矩应低于 50 N。
此外,该功能应实现基于自车速度(TBD)的转向限制。
5.6.3.2 横向控制模式请求
应使用 AsyADModeReqADActiveReq 信号请求横向控制模式。
5.6.3.3 横向控制转向请求
横向控制转向请求应基于信号 AsyPinionAgReqSafe。
5.6.4 停止要求
如果该功能跟随车辆停止,控制器应发送 AsyStandStillReqForCmft ==VehStopReq1_ReqOnVehStopSoftToStandStill。
当请求车辆保持静止时,应始终发送此请求。
停止请求只能在激活/临时停止状态(StandWait/StandActive)状态下发送。
如果车辆起步驶离,则应停止停车请求。
5.6.5 起步要求
停车后,如果功能决策起步,则功能应停止发送停车要求并使用信号 DrvOffReqForLgtCtrl 发送起步请求。
当目标车辆驶离时,应发出驶离请求。
5.6.5.1 起步和停车仲裁
当发送出发请求时,该功能应停止发送停止请求。