一、两种雅克比矩阵的公式及差异说明:
在前面的文章(7)中我们介绍了雅克比矩阵,并给出了标准DH(standard DH)参数下的雅克比矩阵的矢量积公式;这篇文章里我们也给出修正DH(modified DH)参数下的雅克比矩阵公式。对于矢量积方法也有称之为构造法的(这篇文章可以参考下:机器人雅可比矩阵的求法_构造法_飘零过客的博客-CSDN博客_机器人雅克比矩阵计算),后置法就是标准DH参数下的,前置法就是修正DH参数下的
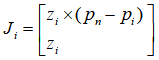
标准DH参数下的雅克比矩阵公式(后置法):

这里是齐次矩阵
的第三列的前三行,
是第四列的前三行;
是齐次矩阵
第四列的前三行,即都是基坐标系下描述的量。
修正DH参数下的雅克比矩阵公式(前置法):
各参数含义与上面类似,也都是在基坐标系下描述的量。
注:上面公式中的量都是在基坐标系下描述的。
对于这个如何理解呢?我们从速度雅克比矩阵的物理意义来理解一下,我们知道速度雅克比矩阵是机械臂末端速度在各个关节上的投影。这里我们注意是各个关节,这是理解上面两个公式差异的关键所在。
我们知道标准DH参数的连杆i的坐标系{i}是建立在传动轴上的,而关节则是在驱动轴上的,即对于连杆i而言它的关节是坐标系{i-1}的轴线,即关节轴与连杆坐标系轴差1在连杆坐标系的前侧故连杆坐标系需要减1(i-1)。所以,我们看到标准DH下的雅克比矩阵(关节i)对应的轴是
(这个是
的第三列的前三行)。这里也有必要注意由于标准DH参数建模的特性其连杆i的坐标系{i}是建立在传动轴上的,所以对于第一个连杆即连杆1,它应当对应的是
。而在第一个连杆的驱动轴上它前面只有一个基坐标系{0},所以
是
的第三列的前三行。
同样的对于修正DH参数连杆i的坐标系{i}是建立在驱动轴上的,即关节轴与连杆坐标系轴是重合的故他们的i相同。
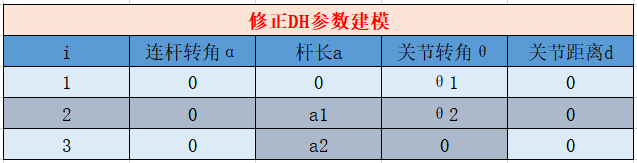
二、实例分析:
下面以一个二连杆为例,分别验算标准DH和修正DH的雅克比矩阵:
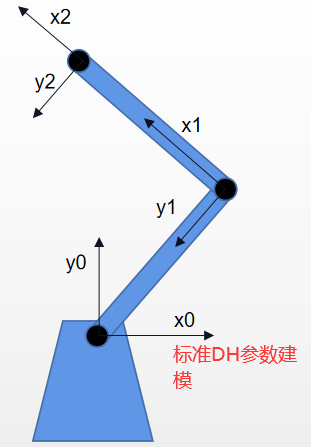
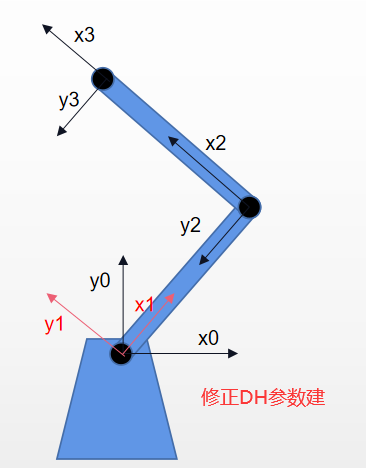
如上图为根据标准DH参数和修正DH参数建立的连杆坐标系。
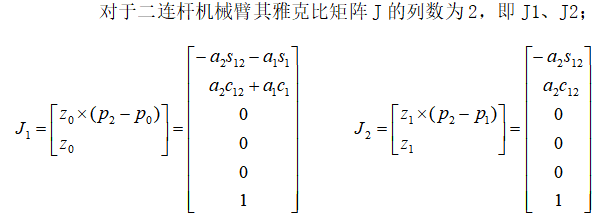
1、标准DH方法下的雅克比求解:
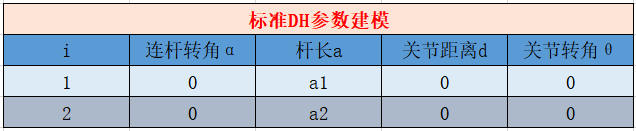

由上面两个齐次矩阵可以得到;上面我们已经说了由于标准DH参数建模的原因,其关节1没有对应的齐次矩阵只能是
,而
就是一个单位矩阵。
(这里注意如果{0}不是基坐标系,则z0和p0就是{0}与基坐标系{B}的齐次矩阵的第三列、第四列的前三行了,具体可以参见前面的文章(7)机械臂的速度雅克比矩阵_公子文刀的博客-CSDN博客中的实例1)。

由上面三个齐次矩阵可以得到:

然后根据标准DH参数的雅克比矩阵求解得:
2、修正DH方法下的雅克比求解:
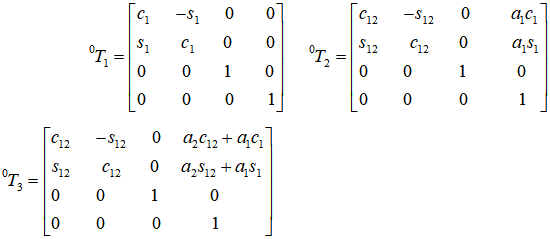

可以发现与标准DH相比只是i往前移动了一位。
再根据修正DH参数下的雅克比矩阵计算公式:
可得:
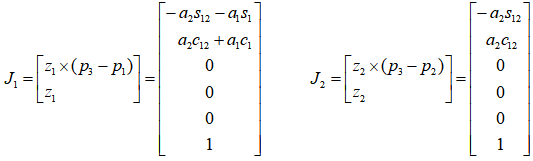
可以看出,两种方法得到的雅克比矩阵是相同的。